




В динамическом режиме ДХ СИТ используют для оценивания динамической погрешности. В этом случае необходимо нормировать полные ДХ СИТ.
Но динамические свойства СИТ влияют не только на динамическую составляющую погрешности измерений. В тех случаях, когда СИТ комплектуют в ИИС, динамические свойства СИТ влияют и на статическую погрешность ИИС. В любой ИИС имеется последовательное соединение нескольких СИТ. Последующие в этом соединении СИТ преобразуют (трансформируют) статические погрешности предыдущих СИТ. Статическая погрешность СИТ в общем случае представляет собой случайный процесс, т.е. характеризуется некоторым частотным спектром. При нормировании погрешности это свойство отражается автокорреляционной функцией или спектральной плотностью. Следовательно, преобразование статической погрешности предыдущего в системе СИТ последующим СИТ будет зависеть от динамических свойств последующего СИТ. Для оценки статической погрешности ИИС необходимо иметь возможность определить влияние динамических свойств некоторого СИТ на преобразование им статической погрешности (случайного процесса) другого СИТ, включенного в ИИС перед ним. Для этой цели полные динамические характеристики могут быть использованы и в статическом режиме.
Поэтому в стандартах предусмотрено нормирование таких динамических характеристик СИТ, которые позволяют оценивать искажения любых изменяющихся сигналов, поступающих на вход СИТ – исследуемых при измерениях (динамическая составляющая погрешности измерений) и сигналов, эквивалентных статической погрешности СИТ, предвключенных к данному СИТ в ИИС (статическая погрешность ИИС).
Для линейных СИТ такими характеристиками являются передаточная функция (или амплитудно-фазовая характеристика),переходная импульсная и т.п. характеристики. Все он относятся к группе так называемых полных динамических характеристик, представляющих собой функции, связывающие между собой изменяющийся во времени входной сигнал и вызываемый им выходной сигнал.
Эти характеристики для линейных звеньев связаны между собой однозначно, поэтому в каждом конкретном случае следует нормировать т из них, которой в данном случае удобней пользоваться и которую удобнее экспериментально оценивать (контролировать).
Полные динамические характеристики линейных аналоговых СИТ однозначно связаны между собой следующими соотношениями:
Переходная характеристика

 ;
;
Импульсная характеристика
 ;
;
Амплитудно-фазовая характеристика
 ;
;
 ;
;
 ,
,
Где и - амплитудно- и фазо-частотная характеристики соответственно;
Передаточная функция
 .
.
При нормировании динамических характеристик указывают номинальные динамические характеристики и наибольшие допускаемые отклонения от них. Нормированные номинальные динамические характеристики в аналитическом виде выражаются следующим образом (в качестве примера использовано звено 1-го порядка):
Переходная характеристика
 ;
;
Импульсная характеристика
 ;
;
Амплитудно-фазовая характеристика
 ;
;
Передаточная функция
 ;
;
Амплитудно-частотная характеристика
 ;
;
Фазо-частотная характеристика


Где Т- постоянная времени; Ksf-номинальный статический коэффициент преобразования.
На графиках рис. 1 (а,б) приведены номинальные динамические характеристики с наибольшими допускаемыми отклонениями от них 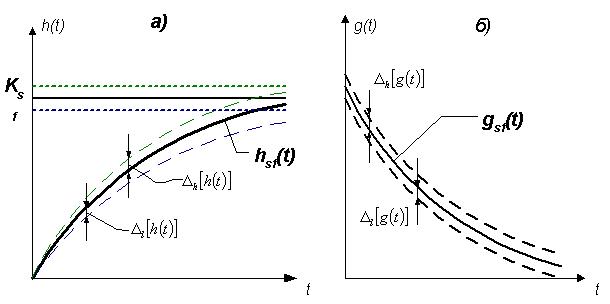
Рис 1.Номинальные ДХ и наибольшие допускаемые отклонения о них.

