




Задача прицеливания при десантировании сводится к тому, чтобы вывести самолет к моменту сброса в такую точку пространства и с таким курсом, чтобы отделившийся от самолета сбрасываемый объект приземлился в заданную точку. Траектория движения груза от команды «Сброс» до приземления в общем случае условно делится на четыре объединенных участка.
Первый участок — участок относительного покоя — от момента подачи сигнала СБРОС до момента начала движения груза в самолете. В этот период груз остается неподвижным относительно самолета и перемещается в воздушном пространстве с его скоростью.
Второй участок — участок вытяжного парашюта — от момента начала движения груза до момента начала наполнения стабилизирующего парашюта. В этот период груз перемещается погрузовой кабине самолета, а после выхода из нее движется в пространстве за самолетом до начала наполнения стабилизирующего парашюта.
Третий участок — участок стабилизации — от момента начала наполнения стабилизирующего парашюта до момента условного наполнения основных куполов. В этот период груз падает с равновесной скоростью снижения и перемещается вслед за самолетом с уменьшающейся поступательной скоростью.
Наполнение основных куполов парашютной системы представляет собой довольно длительный процесс. Он условно делится на два участка, первый из которых относится к участку падения на стабилизирующем парашюте, а второй — к участку снижения на основных куполах. Границей между этими двумя участками является точка условного наполнения основных куполов (ТУН). За момент наполнения основных куполов принимают момент прохождения груза через ТУН.
Четвертый участок — участок снижения на основных куполах — от момента условного наполнения основных куполов до приземления груза. Груз снижается на основных куполах практически с равномерной вертикальной скоростью, перемещаясь в горизонтальной плоскости под воздействием промежуточных ветров в слое снижения.
Пространственная геометрическая схема со всеми элементами, показывающая положение самолета в процессе прицеливания и в точке начала выброски ТНВ относительно точки прицеливания, обеспечивающая приземление МПТ в заданную точку, называется прицельной схемой сбрасывания МПТ.
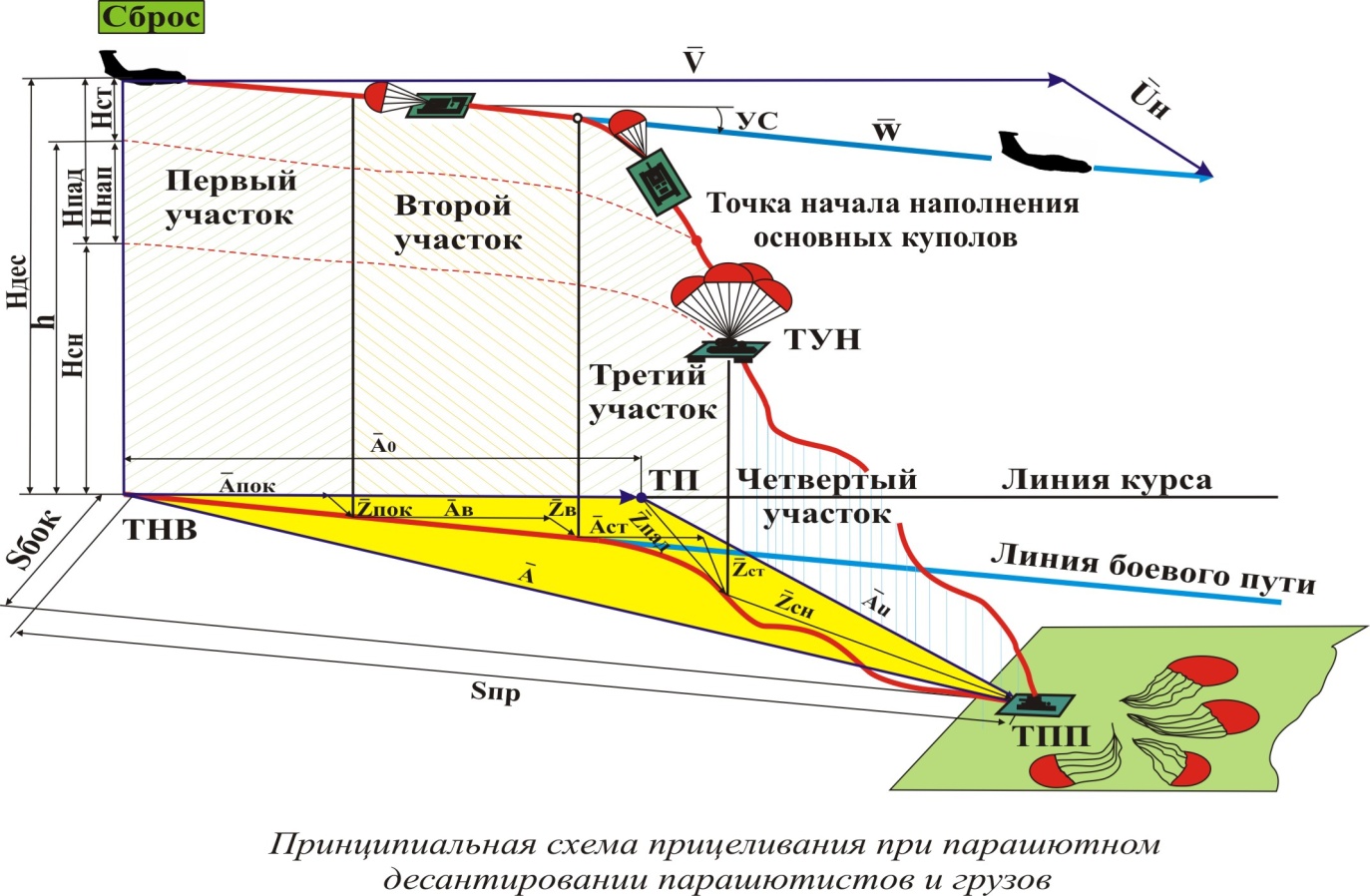
Положение самолета в момент подачи сигнала СБРОС относительно точки приземления характеризуется вектором полного относа (Ā), который равен сумме векторов штилевого относа (Ā0) и ветрового сноса (Ā u): Ā= Ā0 + Ā u..
Вектор штилевого относа представляет собой горизонтальную составляющую пути груза от момента подачи сигнала «Сброс» до приземления при полном безветрии и равен сумме относов груза на первых трех участках его траектории: 
Вектор ветрового сноса представляет собой горизонтальную составляющую пути груза от момента подачи сигнала «Сброс» до приземления за счет воздействия промежуточных ветров и равен векторной сумме сносов груза за время его падения (на первых трех участках) и снижения (на четвертом участке): 
Модули этих векторов определяются как произведение Тпад и Тсн на скорости соответствующих ветров. В УВК предусмотрен алгоритм определения модулей векторов падения
и снижения: 
 .
.
Схема прицеливания при десантировании парашютистов принципиально схожа со схемой прицеливания при парашютном десантировании грузов. Отличие состоит в том, что вместо участка относительного покоя имеет место участок запаздывания (Тзап = 2-3сек) а участок вытяжного парашюта вообще отсутствует. При детальном рассмотрении траекторию снижения МПТ можно разбить на одиннадцать участков.
Прицельная схема сбрасывания строится штурманом на карте крупного масштаба (ККМ). Для определения ТНВ штурман по известному среднему ветру δср, Uср (откуда дует) и по времени снижения ТснΣ рассчитывает вектор сноса Z=UсрТснΣ и откладывает его на карте крупного масштаба от данной точки приземления.
Полученная точка является началом вектора сноса Z. Через данную точку необходимо провести прямую параллельную штилевой линии боевого пути (ШЛБП). От точки начала вектора Z отложить по новой линии боевого пути в направлении обратном направлению захода на площадку (в сторону НБП) в масштабе карты штилевой относ Ао и запаздывание, Sзап. Начало вектора Sзап и будет являться точкой начала выброски ТНВ.

Рассмотрим общую схему прицеливания, применяемую для определения положения точки начала выброски при использовании любых средств выброски в различных условиях.
Элементами этой схемы являются следующие:
 зап - запаздывание начала выброски;
зап - запаздывание начала выброски;
 0 - штилевой относ объекта при свободном падении и на стабилизирующем парашюте;
0 - штилевой относ объекта при свободном падении и на стабилизирующем парашюте;
Z - снос парашютирующего тела ветром.
С учетом этих особенностей задача расчета элементов прицеливания состоит в том, чтобы вывести самолет в такую точку пространства и с таким курсом, при котором проекция линии фактического пути прошла бы параллельно длинной стороне площадки с наветренной стороны на вели-чину боковой составлявшей сноса МПТ ветром Zбок, а расстояние от самолета до точки приземления МПТ вдоль линии пути было бы равно сумме продольной состав-ляющей сноса Zпр, штилевого относа Aо и запаздывания начала выброски Sзап.
Эта формулировка не совсем строгая, т.к. новая линия боево-го пути отстоит фактически не на расстоянии боковой состав-ляющей суммарного сноса Zбок от штилевой линии боево-го пути (ШЛБП). Это расстоя-ние зависит от направления вектора штилевого относа Ао, т.е. значения курса самолета в момент отделения МПТ. Так как боковая составляющая Аоz мала, то чаще всего вектор Ао направляют параллельно штилевой линии боевого пути и тогда
Zлбп = Zбок.
При рассмотрении неавтоматизированных способов прицеливания мы будем исходить из этого допущения. Автоматизированные прицельные устройства задачу прицеливания при десантировании решают с учетом направления вектора штилевого относа
Длина участка запаздывания рассчитывается из тех соображений, что первый парашютист (груз) покидает самолет не мгновенно в момент нажатия кнопки СБРОС, а с задержкой в некоторой точке отделения. Она определятся по формуле: Sзап = W×tзап,
где: W - путевая скорость в момент выброски, м/с; tзап - задержка, с.
Время запаздывания зависит от способа управления выброской и состоит из tпок - времени покоя и tв - времени выхода. При выброске грузов, величина запаздывания определяется в каждом конкретном случае в зависимости от размещения груза в самолете.
РАСЧЕТ ЭЛЕМЕНТОВ СХЕМЫ ПРИЦЕЛИВАНИЯ ПРИ ДЕСАНТИРОВАНИИ С УВК
Расчет всех элементов схемы прицеливания производится в УВК на основе следующих исходных данных:
· высоты Н и истинной скорости десантирования Vист (определяются заданием на полет);
· скорости Ucp и направления δср среднего ветра (определяются в полете или задаются руководителем выброски);
· скорости Uн и направления δн ветра на высоте выброски (определяются в полете);
· коэффициента, характеризующего торможение груза на участке вытяжного парашюта qв (выбирается из баллистических таблиц);
· длины пути груза на вытяжном парашюте SВ (выбирается из баллистических таблиц).
· равновесной скорости падения груза на участке стабилизации, приведенной к уровню моря Vρ0 (выбирается из баллистических таблиц);
· времени относительного покоя груза t пок;
· времени серии tвыбр (рассчитывается штурманом);
· высоты начала раскрытия основных куполов относительно уровня, давление которого установлено на УВО-15К (УВ-75-15ПВ) (определяется заданием на полет);
· скорости приземления груза на основных куполах Vnp, приведенной к уровню моря (выбирается из баллистических таблиц);
· превышения площадки приземления ΔН относительно уровня, давление которого установлено на УВО-15К (УВ-75-15ПВ) (рассчитывается штурманом);
· времени задержки tзад, устанавливаемого на временном датчике прибора раскрытия основных куполов (выбирается из баллистических таблиц);
· потери высоты грузом за время с момента раскрытия до полного наполнения основных куполов Ннап (выбирается из баллистических таблиц).
Эти данные вводятся в ОЗУ УВК и характеризуют баллистические данные десантируемого объекта и его местонахождение в грузовой кабине. На основе вводимых с пульта и поступающих от датчиков исходных данных в УВК производится расчет элементов схемы прицеливания, знание которых будет необходимо руководителю выброски и экипажу при выполнении прицеливания без использования УВК.
Расчет штилевого относа А0 выполняется по формулам:
 ;
;  ;
;
 ;
;  ,
,
где: D - относительная плотность воздуха на высоте десантирования, определяемая по таблице или по формуле:  ;
;
Vр - равновесная скорость снижения груза на высоте десантирования, рассчитываемая по формуле:  ;
;
Vвых - горизонтальная составляющая скорости груза в начале участка стабилизации, рассчитываемая по формуле: Vвых = Vист (qв — 1).
Расчет времени падения (Тпад) выполняется по формулам:
 ;
;
 ;
;  ,
,
где: tв — время движения груза на участке вытяжного парашюта;
tст- время падения груза на участке стабилизации;
Vρh — равновесная скорость снижения груза на высоте начала раскрытия основных куполов, рассчитываемая по формуле:  ,
,
где:  D h - относительная плотность воздуха на высоте начала раскрытия основных куполов:
D h - относительная плотность воздуха на высоте начала раскрытия основных куполов:
 .
.
Расчет времени снижения Тсн выполняется по формулам:  ,
,
где: Нсн - высота начала снижения на основных куполах относительно уровня, давление которого установлено на УВО-15К (УВ-75-15ПВ);
D сн - средняя относительная плотность воздуха в слое снижения:

Общее время снижения груза рассчитывается по формуле: Тобщ =Тпад + Тсн
Это общее время от подачи сигнала СБРОС до приземления груза.
Расчет бокового смещения груза  выполняется по формуле:
выполняется по формуле:  .
.
Это смещение груза от линии пути самолета к моменту наполнения основных куполов.
Основные элементы схемы прицеливания см. в приложении.
Оценка способов определения точки начала выброски в ПНПК-76 позволяет сделать следующие выводы:
1. При выводе самолета в точку начала выброски с заданного направления существует только одна точка выброски, в которой должно произойти отделение десантируемого объекта от самолета.
2. При выводе самолета в ТНВ с произвольного направления существует геометрическое место точек сбрасывания десантируемых объектов в виде так называемой «окружности сбрасывания». Центр такой окружности смещен относительно площадки приземления на величину сноса (ветрового относа) десантируемого объекта, и каждому положению вектора воздушной скорости соответствует своя точка сбрасывания на этой окружности. При изменении положения вектора воздушной скорости точка сбрасывания перемещается по окружности. Если самолет находится на окружности сбрасывания и вектор воздушной скорости направлен к её центру, то отделившийся в этот момент десантируемый объект попадет в заданную точку.
3. При определении ТНВ по «универсальной» программе в УВК рассчитываются текущие значения элементов траектории движения десантируемого объекта. С их помощью строится подвижная модель прицельной схемы, реагирующая на каждое изменение условий десантирования. Для этого заблаговременно определяются и вводятся в УВК, а перед началом боевого пути (НБП) проверяются одиннадцать баллистических коэффициентов и баллистических характеристик десантируемых объектов согласно планшету десантирования.
4. При определении ТНВ по «упрощенной» программе заранее определяются, вводятся в УВК и проверяются пять элементов траектории движения десантируемых объектов, по которым строится неподвижная модель прицельной схемы, не реагирующая на изменение условий десантирования.

