




| ≥льк≥сть супутник≥в GDOP < 8 | Ќаближена довжина базисних л≥н≥й | ѕриблизний час спостережень | |
| вдень | вноч≥ | ||
| 4 ≥ б≥льше | 15-20 км | 1-2 години | 1 година |
| 4 ≥ б≥льше | б≥льше за 30 км | 2-3 години | 2 години |
ѕросторов≥ супутников≥ мереж≥ (основи супутниковоњ геодез≥њ)
111.2.4. ¬изначенн€ координат методом "ст≥й/йди" ("stop and go")
ћетод "ст≥й/йди" створений на основ≥ статичного методу. ¬≥н Ї най≠швидшим дл€ детального топограф≥чного зн≥манн€. «астосовуЇтьс€, коли м≥ж базовою та моб≥льною станц≥€ми невелик≥ в≥ддал≥. ѕ≥д час вим≥рюванн€ технолог≥Їю "ст≥й/йди" беруть участь щонайменше два приймач≥ GPS. Ќайви-г≥дн≥шим у ц≥й технолог≥њ Ї те, що рухомий приймач виконуЇ вим≥рюванн€ на р€дових пунктах (наприклад, п≥кетах) т≥льки 1-2 хвилини. „ас витрачаЇтьс€ переважно т≥льки на перем≥щенн€ з пункту на пункт, а на пункт≥ -"затримуЇмось" ≥ зразу ж ≥демо дал≥.
–обота в режим≥ "ст≥й/йди" складаЇтьс€ ≥з двох частин: 1 - частина ≥н≥ц≥ал≥зац≥њ, €ка необх≥дна дл€ того, щоб розв'€зати початкову неоднозначн≥сть п≥д час постопрацюванн€ за допомогою програмного забезпеченн€ SKI; 2 Ч моб≥льна частина, у межах €коњ розв'€занн€ неоднозначност≥ внос€тьс€ в прог≠рамне забезпеченн€ SKI. ≤н≥ц≥ал≥зац≥€ та наступна за нею моб≥льна частина називаютьс€ ланкою режиму "ст≥й/йди ".
√оловний недол≥к такоњ технолог≥њ в тому, що прот€гом спостережень ус≥Їњ мереж≥ пункт≥в (п≥д час вим≥рюванн€ на пункт≥ ≥ нав≥ть п≥д час транспортуванн€ чи перенесенн€ приладу з пункту на пункт) обов'€зковим Ї зв'€зок хоча б ≥з чотирма супутниками GPS. “ому цю технолог≥ю неможливо застосувати на територ≥€х ≥з високими забудовами, у л≥с≥. –ух п≥д деревами, мостами перериваЇ вим≥рюванн€. якщо з'€вл€Їтьс€ пов≥домленн€ про втрату захопленн€ сигнал≥в ≥, у результат≥, захопленн€ менше н≥ж чотирьох супутник≥в, потр≥бно заново почати ланку спостережень. “ому цей метод можна застосувати т≥льки на в≥дкрит≥й м≥сцевост≥, незаросл≥й ≥ незабудован≥й.
≤н≥ц≥ал≥зац≥ю можна виконувати одним ≥з трьох способ≥в:
1. ѕриблизно 25-хвилинне статичне вим≥рюванн€ дов≥льноњ бази. ÷е виконуЇтьс€ до початку вим≥рюванн€. ћ≥н≥мум два приймач≥ ведуть статичне вим≥рюванн€ на двох дов≥льних пунктах, а дал≥ рухомий приймач виконуЇ моб≥льну частину. “акий спос≥б ≥н≥ц≥ал≥зац≥њ називають ще режимом "швидкоњ статики".
2. ”становленн€ станц≥њ на точц≥ з в≥домими координатами або в≥домим вектором м≥ж двома точками. ¬иконуЇтьс€ вим≥рюванн€ статично прот€гом 5-10 хв.
3. —татичне вим≥рюванн€ ≥з зам≥ною антен. ќбидва приймач≥ вико≠нують вим≥рюванн€ статично упродовж 5 хв, а дал≥ в приймачах зам≥нюютьс€ антени ≥ продовжуютьс€ спостереженн€ ще близько 5 хв. “очн≥сть визначенн€ координат точок у режим≥ "ст≥й/йди" дор≥внюЇ 1-2 см ± 1 ррм.
–озд≥л III
ћетод застосовуЇтьс€ дл€ зн≥манн€ в≥дкритих територ≥й, дор≥г, трубо≠провод≥в та ≥нших споруд л≥н≥йного типу. ћетод усп≥шно працюЇ дл€ малих в≥ддалей м≥ж точками зн≥манн€. ¬≥н найшвидший ≥ найекономн≥ший; дл€ спостережень потр≥бн≥ лише чотири супутники, виконуЇтьс€ на будь-€кому транспорт≥ або п≥шки. Ќедол≥ки - сигнали в≥д чотирьох супутник≥в не повинн≥ перериватис€.
|
|
|
111.2.5. ¬иб≥р пром≥жку часу та параметри м≥си п≥д час спостереженн€ у режим≥ "ст≥й/йди" ("stop and go")
ƒл€ усп≥шного вим≥рюванн€ в режим≥ "ст≥й/йди" необх≥дно працювати у межах в≥кна з добрим розташуванн€м супутник≥в. Ќеобх≥дно вибрати в≥кно, за можлив≥стю, з максимальною к≥льк≥стю супутник≥в; чим б≥льше супутник≥в, тим менше втрат захопленн€ сигналу. “реба намагатис€ вибрати в≥кна, у межах €ких супутники розм≥щен≥ на прийн€тих висотах над обр≥Їм; високо розм≥щен≥ супутники будуть добре прийматись приймачем, отже, буде менше втрат захоплень сигналу (див. табл. III. 2.2).
“аблиц€ III. 2.2
¬иб≥р в≥кон дл€ спостережень у режим≥ "ст≥й/йди"
| ¬≥кно | ≥льк≥сть супутник≥в, њх висота над горизонтом, GDOP |
| ƒобре в≥кно | 5 або б≥льше супутник≥в, висота >20∞, GDOP < 5 |
| ¬икористовувати можна, але не рекомендуЇтьс€ | 4 супутники, вище за 15∞, GDOP < 8 |
| Ќе варто використовувати | 4 супутники, GDOP > 8 |
| ¬икористовувати неможливо | 3 супутники або менше |
ѕ≥д час роботи у режим≥ "ст≥й/йди" можна використовувати статичну м≥с≥ю STS Default (ћ≥с≥€ статичного зн≥манн€ за замовчуванн€м). ѕроте можна створити спец≥альну м≥с≥ю дл€ роботи в режим≥ "ст≥й/йди" дл€ референцноњ станц≥њ ≥ дл€ моб≥льноњ станц≥њ. ” референцному приймач≥ повинен бути встановлений режим роботи "статика" (STS), а у моб≥льному - "ст≥й/йди" (SGS). ¬ обох приймачах повинен бути встановлений ущ≥льнений режим збиранн€ даних ("COMPACTED"). ƒискретн≥сть записуванн€ даних повинна бути однакова на обох приймачах. ѕ≥д час вибору дискретност≥ запису даних варто враховувати Їмн≥сть записувальних пристроњв на референцн≥й станц≥њ, а також тривал≥сть перебуванн€ на точц≥, де встановлений моб≥льний приймач. «деб≥льшого дискретн≥сть запису даних вибирають такою, що дор≥внюЇ 3, 4 або 5 секунд (див. табл. ѕ≤.2.3).
ѕросторов≥ супутников≥ мереж≥ (основи супутниковоњ геодез≥њ)
“аблиц€ III. 2.3
–екомендован≥ параметри м≥с≥њ дл€ роботи у режим≥ "ст≥й/йди"
| ѕараметри | –еференцна станц≥€ | ћоб≥льна станц≥€ |
| ѕрацездатн≥сть/частота Z^ | AUTO | AUTO |
| ћ≥н≥мальна висота супутника над горизонтом | 15∞ | 15∞ |
| –ежим роботи | "статика" (STS) | "ст≥й/йди" (SGS) |
| ”щ≥льнений, виб≥рковий режим запису даних | ущ≥льнений | ущ≥льнений |
| ƒискретн≥сть реЇстрац≥њ даних | 5 секунд | 5 секунд |
111.2.6. ¬изначенн€ координат методом "швидкоњ статики"
—татичний метод - це класичний метод GPS-зн≥манн€, €кий вико≠ристовуЇтьс€ на довгих л≥н≥€х. —постереженн€ можуть тривати дек≥лька годин.
Ќа коротких л≥н≥€х, за нормальних умов дл€ роботи, час спостережень може бути значно зменшеним - до 5-10 хвилин. «в≥дси терм≥н "швидка статика". ќтже, дл€ "швидкоњ статики" час спостережень скорочуЇтьс€ до пром≥жк≥в часу, близьких до методу "ст≥й/йди".
ѕроте п≥д час "швидкоњ статики" моб≥льна станц≥€ залишаЇтьс€ на пункт≥ 5-10 хвилин. ѕот≥м вона вимикаЇтьс€ ≥ перем≥щуЇтьс€ на наступну точку. ѕ≥д час зн≥манн€ в режим≥ "ст≥й/йди" моб≥льна станц≥€ залишаЇтьс€ ув≥мкненою, а захопленн€ супутник≥в обов'€зково збер≥гаЇтьс€ також п≥д час перем≥щенн€ приймача з точки на точку. ” цьому ≥стотна в≥дм≥нн≥сть м≥ж "швидкою статикою" та методикою "ст≥й/йди".
|
|
|
« ≥ншого погл€ду, "швидка статика" Ї р≥зновидом статичного методу. ƒл€ "швидкоњ статики" особливо необх≥дно, щоб ≥оносферн≥ збуренн€ були б≥льш-менш ≥дентичними дл€ двох точок встановленн€. ƒл€ вс≥х GPS-вим≥рювань ≥, особливо, дл€ "швидкоњ статики" потр≥бно намагатис€ м≥н≥м≥зувати довжини базисних л≥н≥й. ƒл€ надто короткого часу спостережень, поганого гео≠метричного фактора (GDOP) або ≥нтенсивних ≥оносферних збурень можлива така ситуац≥€, коли програмне забезпеченн€ п≥д час постобробленн€ розв'€же неоднозначн≥сть, але результати будуть спотворен≥ й ≥стотно в≥др≥зн€тимутьс€ в≥д техн≥чних характеристик приймач≥в. ѕ≥д час вим≥рюванн€ "швидкою статикою", €к ≥ в попередн≥х технолог≥€х, працюють щонайменше два приймач≥. ќдин - встановлений на пункт≥ в≥дносност≥, другий перем≥щуЇтьс€ з пункту на пункт. “ехнолог≥€ вимагаЇ одноразового вим≥рюванн€ на кожному визна-
–озд≥л III
чуваному пункт≥, проте вим≥рюванн€ за ц≥Їю технолог≥Їю потр≥бно виконувати т≥льки двочастотними приймачами. ÷€ технолог≥€ запропонована в 1992 роц≥ ф≥рмою "Trimble". ‘≥рма створила в≥дпов≥дну програму, у €к≥й запропоновано новий алгоритм виключенн€ багатозначност≥ п≥д час фазового вим≥рюванн€. ≤стотною перевагою ц≥Їњ технолог≥њ Ї швидке визначенн€ неоднозначност≥ п≥д час використанн€ комб≥нац≥њ кодового ≥ фазового вим≥рюванн€. ѕ≥д час вико≠нанн€ вим≥рюванн€ цей метод вимагаЇ оптимальноњ конф≥гурац≥њ супутник≥в.
” табл. ≤њњ.2.4 подано рекомендовану тривал≥сть спостережень ≥ довжини базисних л≥н≥й.
“аблиц€ III. 2.4 ќр≥Їнтовна тривал≥сть ≥ довжина баз дл€ "швидкоњ статики"
| ≥льк≥сть супутник≥в GDOP < 8 | Ќаближена довжина базисних л≥н≥й, км | ѕриблизний час спостережень | |
| вдень, хв | ¬ноч≥, хв | ||
| 4 ≥ б≥льше | до 5 | 5-10 | |
| 4 ≥ б≥льше | 5-ё | 10-20 | 5-ё |
| 5 ≥ б≥льше | 10-15 | б≥льше за 20 | 5-20 |
III.2.7. “ехнолог≥€ псевдостатична, псевдок≥нематична, реокупац≥йна (Reoccupation)
÷€ технолог≥€ позбавлена недол≥к≥в методики "ст≥й/йди". ¬она ірун≠туЇтьс€ на подв≥йному GPS-вим≥рюванн≥ на кожному пункт≥, що визначаЇтьс€, не вимагаЇ, €к технолог≥€ "ст≥й/йди", пост≥йного безперервного зв'€зку ≥з супутниками п≥д час транспортуванн€ приймач≥в ≥з пункту на пункт.
” вим≥рюванн≥ беруть участь щонайменше два приймач≥. ћожуть одно≠часно працювати дек≥лька рухомих приймач≥в. “од≥ потр≥бно розраховувати маршрути так, щоб ус≥ приймач≥ перем≥щались приблизно одночасно, тому що вс≥ рухом≥ приймач≥ повинн≥ починати спостереженн€ на нових пунктах (п≥сл€ перем≥щенн€) одночасно. ”весь маршрут кожний рухомий приймач повинен пройти за 2 години. ¬им≥рюванн€ на кожному пункт≥ триваЇ близько 10-15 хвилин. Ќа останньому пункт≥ маршруту, що визначаЇтьс€, чекаЇмо 1-2 години на зм≥ну конф≥гурац≥њ супутник≥в ≥ заново виконуЇмо спостереженн€ GPS на кожному визначуваному пункт≥ (реокупац≥€) у зворотн≥й посл≥довност≥. ÷е подв≥йне вим≥рюванн€ на кожному пункт≥ зам≥нюЇ ≥н≥ц≥ал≥зац≥ю. “очн≥сть виз≠наченн€ вектора завдовжки до 10 км цим методом ≥з застосуванн€м висо≠коточних, двочастотних приймач≥в Ї такою: довжина вектора 3 см ± 2 х lO^S, перевищенн€ к≥нц≥в вектора 4 см ± 2 х 10"6S.
ѕросторов≥ супутников≥ мереж≥ (основи супутниковоњ геодез≥њ)
ѕеревага ц≥Їњ технолог≥њ в тому, що вона не потребуЇ зв'€зку ≥з супут≠никами п≥д час транспортуванн€ прилад≥в; недол≥ки - необх≥дн≥сть подв≥йного встановленн€ приймач≥в на тих самих пунктах та необх≥дн≥сть одночасного спостереженн€ не менше н≥ж п'€ти супутник≥в.
111.2.8. –обота у режим≥ "к≥нематика"
–обота у режим≥ "к≥нематика" аналог≥чна до режиму "ст≥й/йди". ¬она складаЇтьс€ ≥з двох частин:
1. „астини ≥н≥ц≥ал≥зац≥њ, €ка необх≥дна дл€ того, щоб розв'€зати по≠чатков≥ неоднозначност≥ п≥д час постпольового обробленн€, виконаного за допомогою програмного забезпеченн€ SKI.
|
|
|
2. ћоб≥льноњ частини, у межах €коњ розв'€занн€ неоднозначност≥ внос€тьс€ у програмне забезпеченн€ SKI.
–озб≥жност€ми м≥ж режимами "к≥нематика" ≥ "ст≥й/йди", по-перше, Ї те, що п≥д час моб≥льноњ частини в режим≥ "ст≥й/йди" вим≥рюванн€ стосуютьс€ т≥льки реальних точок на м≥сцевост≥, а п≥д час моб≥льноњ частини в режим≥ "к≥нематика" вим≥рюванн€ стосуютьс€ визначених момент≥в часу; по-друге, €к уже зазначалось, у режим≥ "к≥нематика" моб≥льний приймач рухаЇтьс€ безперервно, а в режим≥ "ст≥й/йди" моб≥льний приймач зупин€Їтьс€.
≤н≥ц≥ал≥зац≥€ та наступна за нею моб≥льна частина називаютьс€ ланками режиму "к≥нематика ".
≤н≥ц≥ал≥зац≥€ - необх≥дний процес. Ќеоднозначност≥ повинн≥ бути розв'€зан≥ п≥д час постопрацюванн€ за допомогою програмного забезпеченн€ SKI. “≥льки п≥сл€ цього значенн€ знайдених неоднозначностей будуть посл≥≠довно передаватис€ вперед за допомогою SKI у моб≥льну частину ланки.
≤н≥ц≥ал≥зац≥€ може бути виконана з використанн€м:
1. –ежиму "швидка статика".
2. ¬становленн€ станц≥њ на точц≥ з в≥домими координатами.
Ќа моб≥льн≥й д≥л€нц≥ ланки повинно спостер≥гатис€ не менше в≥д чотирьох супутник≥в. якщо супутник≥в менше н≥ж чотири, через втрату захопленн€ сигналу або розташуванн€ супутник≥в SKI не може передавати вперед значенн€ неоднозначностей, ≥ ланка буде перервана.
«наченн€ GDOP не повинне перевищувати 8, €кщо результати за точн≥стю мають дос€гати значень, зазначених у техн≥чних характеристиках. Ѕажано, щоб значенн€ GDOP дор≥внювало або було менше за 5.
ўоб дос€гти високоточних результат≥в визначень координат у режим≥ "к≥нематика", необх≥дно виконувати вим≥рюванн€ у максимально спри€тливих в≥кнах розм≥щенн€ супутник≥в.
–озд≥л III
“аблиц€ III.2.5 ¬иб≥р в≥кон дл€ спостережень у режим≥ "к≥нематика"
| ¬≥кно | ≥льк≥сть супутник≥в, њхн€ висота над горизонтом, GDOP |
| ƒобре в≥кно | 5 ≥ б≥льше супутник≥в, висота за можлив≥стю б≥льше н≥ж 20∞, GDOP < 5 |
| ћожна використовувати, але не рекомендуЇтьс€ | 4 супутники, супутники вище н≥ж 15∞, GDOP< 8 |
| Ќе рекомендуЇтьс€ використовувати | 4 супутники, GDOP > 8 |
| ¬икористовувати не можна | 3 супутники або менше |
III.2.9. –обота у режим≥ "к≥нематика у польот≥"
¬изначенн€ координат у режим≥ " ≥нематика у польот≥" ( ¬ѕ) забез≠печують отриманн€ траЇктор≥њ руху сенсора без необх≥дност≥ виконанн€ статичноњ ≥н≥ц≥ал≥зац≥њ. —енсор може безперервно рухатись, починаючи з першоњ епохи спостережень.
Ћанка вим≥рюванн€ в режим≥ ¬ѕ складаЇтьс€ т≥льки з моб≥льноњ (рухомоњ) частини. ” цьому режим≥ може бути дос€гнутий такий самий р≥вень точност≥ визначенн€ координат, €к ≥ в режим≥ "к≥нематика". ƒл€ цього необх≥дно:
Х п≥д час першоњ епохи спостережень захопити не менше в≥д п'€ти супутник≥в;
Х повинно бути невеликим значенн€ коеф≥ц≥Їнта GDOP;
Х в≥дсутн≥сть пропуску цикл≥в або зникненн€ сигналу п≥д час перших 200 секунд спостережень у ланц≥;
Х максимальна в≥дстань м≥ж референцною ≥ моб≥льною станц≥€ми повинна збер≥гатись на р≥вн≥ не менше н≥ж 5 км.
«наченн€ неоднозначностей будуть передаватись вперед по ланц≥ ¬ѕ доти, доки будуть спостер≥гатись не менше в≥д чотирьох супутник≥в без втрати. як т≥льки к≥льк≥сть супутник≥в стане меншою в≥д чотирьох, необх≥дно буде ще 200 секунд спостережень не менше н≥ж п'€ти супутник≥в без њхньоњ втрати.
ѕрограма дл€ опрацюванн€ GPS-вим≥р≥в буде опрацьовувати результати у два етапи:
Ќа першому етап≥ неоднозначн≥сть буде розв'€зуватис€ п≥сл€ перших 200 секунд реЇстрац≥њ даних. ѕ≥сл€ цього розв'€зан≥ неоднозначност≥ передаютьс€ вперед прот€гом часу спостереженн€ не менше н≥ж чотирьох супутник≥в.
|
|
|
__________ ѕросторов≥ супутников≥ мереж≥ (основи супутниковоњ геодез≥њ) ________
Ќа другому етап≥ розв'€зан≥ неоднозначност≥ передаютьс€ назад на початок ланки, що забезпечуЇ отриманн€ високоточних результат≥в визначенн€ координат дл€ першоњ епохи п≥д час руху вперед.
ћетод ¬ѕ рекомендуЇтьс€ застосовувати, €кщо ≥н≥ц≥ал≥зац≥ю в ста≠тичних умовах важко виконати або п≥д час визначенн€ координат ≥з рухомих об'Їкт≥в.
ўоб дос€гти високоточних результат≥в визначень координат у режим≥ " ≥нематика у польот≥", необх≥дно виконувати вим≥рюванн€ у максимально добрих в≥кнах розташуванн€ супутник≥в, поданих у табл. ѓѓ≤.2.5.
II1.2.10. “ехнолог≥€ диференц≥йного DGPS-вим≥рюванн€ (Differential GPS)
÷€ технолог≥€ спочатку спиралась т≥льки на нав≥гац≥йн≥ кодов≥ вим≥рю≠ванн€ псевдов≥ддалей, €к≥ виконувалис€ з розривами в час≥. ¬ останн≥ роки в ц≥й технолог≥њ почали застосовувати також фазов≥ вим≥рюванн€ й опрацюванн€ вим≥р≥в типу "past-processing". ≤стотним у ц≥й нов≥тн≥й технолог≥њ Ї те, що базова станц≥€ передаЇ до рухомого приймача поправки, €к≥ використовуЇ цей приймач дл€ уточненн€ свого положенн€ (координат).
—учасна диференц≥йна технолог≥€ передбачаЇ на€вн≥сть базовоњ станц≥њ, €ка стац≥онарно, ц≥лодобово працюЇ на пункт≥ з високоточно визначеними коор≠динатами ≥ визначаЇ певн≥ систематичн≥ похибки. якраз так≥ дан≥, €к поправки, передаютьс€ до рухомих приймач≥в. ÷е даЇ змогу в реальному час≥ визначати точн≥ результати (координати) рухомого приймача.
«ауважимо, що п≥д час цього методу користувач може мати т≥льки один приймач, оск≥льки роль другого приймача виконуЇ базова, стац≥онарна станц≥€.
ƒл€ диференц≥йних технолог≥й використовують спец≥ально обладнан≥ приймач≥, €к≥ повинн≥ п≥дтримувати безперервний зв'€зок ≥з базовою станц≥Їю. ƒе€к≥ ≥з цих приймач≥в, що забезпечують метрову точн≥сть визначенн€ коор≠динат, мають масу менше н≥ж 1 кг, а њхн≥ розм≥ри так≥, що вони пом≥щаютьс€ на долон≥.
“очн≥сть вим≥рюванн€ DGPS, що ірунтуютьс€ т≥льки на кодових вим≥рюванн€х, становить 1-2 м. “ака точн≥сть достатн€ дл€ нав≥гац≥йних ц≥лей, а також дл€ виклику м≥л≥ц≥њ (пол≥ц≥њ), швидкоњ допомоги, пожежник≥в, автотранспорту тощо. Ќа цих засадах працюють також морськ≥ та ав≥ац≥йн≥ системи.
–озд≥л III
≤≤≤.«. ѕобудова державних геодезичних мереж (ƒ√ћ) супутниковими методами
≤≤≤.«. 1. «агальн≥ в≥домост≥ про побудову ƒ√ћ супутниковими методами
ер≥вний техн≥чний документ ( “ƒ) побудови державноњ геодезичноњ мереж≥ (ƒ√ћ) супутниковими методами створений в≥дпов≥дно до чинних "ќсновних положень створенн€ ƒ√ћ ”крањни". ƒ√ћ - це сукупн≥сть пункт≥в, р≥вном≥рно розташованих на територ≥њ крањни й закр≥плених на м≥сцевост≥ спец≥альними центрами, €к≥ забезпечують њхнЇ збереженн€ та ст≥йк≥сть у плановому та висотному аспектах прот€гом тривалого часу.
—кладовими частинами ƒ√ћ Ї планова й висотна геодезичн≥ мереж≥, пункти €ких повинн≥ бути сум≥щен≥ або мати над≥йний геодезичний зв'€зок.
ƒержавн≥ геодезичн≥ планов≥ та висотн≥ мереж≥ створювались окремо класичними, до того ж принципово р≥зними методами.
ѕросторов≥ ƒ√ћ також створюютьс€ в ≥нтересах господарськоњ д≥€ль≠ност≥, науки та оборони крањни дл€ розв'€занн€ таких основних задач:
Х встановленн€ Їдиноњ системи координат на територ≥њ ус≥Їњ крањни;
Х забезпеченн€ картографуванн€ крањни, акватор≥й мор≥в та внутр≥шн≥х водойм;
Х вивченн€ природних ресурс≥в та веденн€ державних кадастр≥в;
Х забезпеченн€ вих≥дними даними засоб≥в наземноњ, морськоњ й аерокосм≥чноњ нав≥гац≥њ, аерокосм≥чного мон≥торингу довк≥лл€;
Х вивченн€ ф≥гури й грав≥тац≥йного пол€ «емл≥ та њхн≥х зм≥н у час≥;
Х вивченн€ геодинам≥чних €вищ та рух≥в земноњ поверхн≥;
Х вивченн€ зон деформац≥й земноњ поверхн≥ дл€ складанн€ карт за≠гального сейсм≥чного районуванн€;
Х вивченн€ руху полюс≥в та нер≥вном≥рност≥ обертанн€ «емл≥;
Х метролог≥чне забезпеченн€ високоточних техн≥чних засоб≥в визна≠ченн€ розташуванн€ й ор≥Їнтуванн€.
—упутников≥ методи дають змогу створювати просторов≥ (планов≥ та висотн≥) мереж≥ одночасно. Ќадал≥ будемо розгл€дати т≥льки просторов≥ мереж≥, що створюютьс€ супутниковими методами [25, 26].
” св≥тов≥й практиц≥ супутников≥ просторов≥ мереж≥ прийн€то под≥л€ти на:
Х глобальн≥;
ѕросторов≥ супутников≥ мереж≥ (основи супутниковоњ геодез≥њ)
Х континентальн≥;
Х нац≥ональн≥;
Х рег≥ональн≥;
Х локальн≥.
«розум≥ло, що нац≥ональн≥ мереж≥ Ї державними геодезичними мережами. ≤нш≥ - рег≥ональн≥, локальн≥ Ї мережами, що створюютьс€ на певних частинах крањни, рег≥ональн≥ - на значних за площею територ≥€х, а локальн≥ - на значно менших.
|
|
|
ƒал≥ будуть розгл€датис€ нац≥ональн≥, рег≥ональн≥ та локальн≥ мереж≥.
–озгл€немо мереж≥, що створюютьс€ з використанн€м метод≥в супут-никовоњ геодез≥њ.
јстрономо-геодезичн≥ мереж≥ 1 класу (ј√ћ-1) будуютьс€ у вигл€д≥ однор≥дноњ за точн≥стю мереж≥, що складаЇтьс€ з р≥вном≥рно розм≥щених пункт≥в, в≥ддалених один в≥д одного на 50-150 км. „астина пункт≥в ј√ћ-1 €вл€Ї собою пост≥йно д≥юч≥ (перманентн≥) станц≥њ супутникових спостережень та астрономо-геодезичн≥ обсерватор≥њ, на €ких виконуЇтьс€ комплекс супут≠никових, астрономо-геодезичних, грав≥метричних та геоф≥зичних спостережень, що забезпечить редукуванн€ координатних визначень на Їдину епоху з урахуванн€м рел€тив≥стських ефект≥в, приливних та ≥нших рух≥в земноњ кори.
ѕросторове положенн€ пункт≥в ј√ћ-1 визначаЇтьс€ методом супут-
никовоњ геодез≥њ з в≥дносною похибкою Ћр/р = 1:108 (де јр - с. к. п. виз≠наченн€ геоцентричного рад≥уса р - певного пункту). ожний пункт ј√ћ-1
маЇ бути пов'€заний супутниковими вим≥рами не менше €к ≥з трьома сум≥жними пунктами мереж≥.
ѕункти ј√ћ-1 повинн≥ бути вставлен≥ у мереж≥ н≥велюванн€ 1 та 2 клас≥в, що даЇ змогу визначити перевищенн€ нормальних висот м≥ж сум≥жними пунктами ≥з с. к. п., не б≥льшою за 0,05 м.
Ќа кожному пункт≥ ј√ћ-1 виконуютьс€ й пер≥одично повторюютьс€ визначенн€ в≥дхилень вискових л≥н≥й ≥з середньою квадратичною похибкою, що дор≥внюЇ 0,5".
√еодезична мережа 2 класу. ѕункти розташовуютьс€ на в≥дстан≥ 8-12 км один в≥д одного, а на територ≥€х м≥ст, великих промислових об'Їкт≥в - 5-8 км ≥ визначаютьс€, €к правило, супутниковими методами (допускаЇтьс€ визначенн€ традиц≥йними методами) ≥з в≥дносною похибкою 1/300000. Ќайб≥льша довжина стор≥н 20 км, найменша - 5 км.
ѕункти 2 класу також мають бути сум≥щен≥ з геометричним н≥велюванн€м 1, 2, або 3 класу, €ке забезпечить точн≥сть взаЇмного положенн€ пункт≥в за висотою ≥з с. к. п., не б≥льшою за 0,05 м на р≥внин≥, а в г≥рських районах - 0,2 м.
–озд≥л III
√еодезична мережа згущенн€ 3 класу будуЇтьс€ з метою зб≥льшенн€ к≥ль≠кост≥ пункт≥в до щ≥льност≥, €ка забезпечуЇ створенн€ зн≥мальноњ (робочоњ) основи великомасштабного топограф≥чного та кадастрового зн≥манн€.
Ќов≥ просторов≥ мереж≥ згущенн€ 3 класу будуютьс€ т≥льки в≥дносними методами супутниковоњ геодез≥њ. ¬≥дносне визначенн€ взаЇмного положенн€ пункт≥в повинно бути забезпечене з похибкою 1:200000, а середн€ квадратична похибка - 0,05 м. ¬их≥дними пунктами побудови Ї пункти старших клас≥в.
ѕункти просторовоњ мереж≥ 3 класу (€к ≥ 2 класу) повинн≥ бути сум≥щен≥ з мережами н≥велюванн€ 1, 2 або 3 клас≥в, €к≥ забезпечать точн≥сть висотного положенн€ пункт≥в ≥з с. к. п., не б≥льшу за 0,05 м, а у г≥рськ≥й ≥ важкодоступн≥й м≥сцевост≥ нормальн≥ висоти можуть визначатис€, €к ≥ мереж≥ 2 класу, GPS-н≥велюванн€м, €ке виконуЇтьс€ в≥дносними супутниковими методами. ” такому раз≥ середн€ квадратична похибка пункт≥в за висотою також не повинна перевищувати 0,2 м, €к ≥ дл€ мереж 2 класу.
ѕросторов≥ геодезичн≥ мереж≥ спец≥ального призначенн€, €к≥, по сут≥, Ї рег≥ональними та локальними, зд≥йснюютьс€ методами супутниковоњ геодез≥њ або традиц≥йними геодезичними методами. ”с≥ геодезичн≥, астрономо-грав≥-метричн≥ вим≥рюванн€ та супутников≥ спостереженн€ на таких мережах зазви≠чай виконуютьс€ з п≥двищеною точн≥стю й привод€тьс€ до Їдиноњ геодезичноњ системи координат дл€ використанн€ њх п≥д час зр≥вноваженн€ ƒ√ћ.
¬иробничий цикл побудови ƒ√ћ складаЇтьс€ з таких основних цикл≥в роб≥т:
Х проектуванн€ мереж;
Х рекогностуванн€ й побудова геодезичних пункт≥в;
Х спостереженн€ методами супутниковоњ геодез≥њ;
Х математичне опрацюванн€ вим≥р≥в;
Х складанн€ каталог≥в просторових координат.
ƒл€ забезпеченн€ топограф≥чного зн≥манн€ встановлюють так≥ норми щ≥льност≥ пункт≥в та репер≥в ƒ√ћ:
Х дл€ зн≥манн€ у масштаб≥ 1:25000 ≥ 1:10000 - 1 пункт на 30 км2 ≥ 1 репер на трапец≥ю масштабу 1:10000;
Х дл€ зн≥манн€ у масштаб≥ 1:5000 - 1 пункт на 20-30 км2 ≥ 1 репер на 10-15 км;
Х дл€ зн≥манн€ у масштаб≥ 1:2000 ≥ б≥льше - 1 пункт на 5-15 км2 ≥ 1 репер на 5-7 км2.
ѕросторов≥ супутников≥ мереж≥ (основи супутниковоњ геодез≥њ)
111.3.2. —истеми координат, що використовуютьс€ у косм≥чн≥й геодез≥њ
ѕоложенн€ пункт≥в ƒ√ћ визначаЇтьс€ у двох системах координат: за-гальноземн≥й та референцн≥й. ћ≥ж обома системами встановлюЇтьс€ однознач≠ний зв'€зок, €кий визначаЇтьс€ параметрами взаЇмного переходу (елементами ор≥Їнтуванн€).
«а загальноземну систему координат приймаЇтьс€ ™вропейська геоцент≠рична система координат ETRF-89 ≥з початком координат у центр≥ мас «емл≥ та з в≥дл≥ковим ел≥псоњдом GRS-80, що маЇ так≥ параметри:
Х велика п≥вв≥сь a = 6378137 м;
Х стисненн€ ел≥псоњда 1:298,2572220101;
Х мала п≥вв≥сь b = 6356752 м;
Х середн≥й рад≥ус /?, = 6371008,7714 м;
Х значенн€ нормального грав≥тац≥йного пол€ на екватор≥ ge = 9,7803267715 мс"2;
| g_ = 9,8321863685 мс"2; |
значенн€ нормального грав≥тац≥йного пол€ на полюс≥ = 0 8-
Х перший ексцентриситет Ї1 = 0,00669438002290.
–еференцною системою координат залишаЇтьс€ система координат 1942 року (— -42) ≥з вих≥дними даними референц-ел≥псоњда расовського:
Х велика п≥вв≥сь a = 6378245 м;
Х мала п≥вв≥сь № = 6356863 м;
Х стисненн€ ел≥псоњда 1:298,3;
Х висота геоњда в ѕулково над референц-ел≥псоњдом дор≥внюЇ нулю;
Х геодезичн≥ координати ѕулковськоњ обсерватор≥њ (центр сигналу ј);
Х широта ¬ = 59∞46'15,359";
Х довгота в≥д √ринв≥ча L = 28∞19'28,318";
Х геодезичний азимут на пункт Ѕугри 121∞06'42,305";
Х середн≥й рад≥ус «емл≥ 6371117,6729 м;
Х перший ексцентриситет Ї = 0,006693420623. ѕоложенн€ пункт≥в у прийн€тих системах задаютьс€:
Х просторовими пр€мокутними координатами X, Y, Z. ¬≥сь X ле≠
жить у площин≥ нульового мерид≥ана, в≥сь ”-у площин≥ екватора ≥ спр€мована
праворуч в≥д площини нульового мерид≥ана, а напр€мок ос≥ Z зб≥гаЇтьс€ з
в≥ссю обертанн€ в≥дл≥кового ел≥псоњда;
| –озд≥л III |
| геодезичними ел≥псоњдальними координатами ¬, L,H; плоскими пр€мокутними координатами X, Y. |

–ис. 111.3.1. ѕр€мокутн≥ геоцентричн≥ координати, координати X, Y, Z
та геодезичн≥ ел≥псоњдальн≥ координати ¬, L; јќ - пр€мовисна л≥н≥€;
ј - нормаль до ел≥псоњда в точц≥ ј; јј' - Ќ - геодезична висота точки ј
ЌагадаЇмо: геодезична широта ¬ точки ј - це кут, створений нормаллю до поверхн≥ ел≥псоњда ≥з площиною екватора; геодезична довгота L точки ј -це двогранний кут, створений площиною початкового мерид≥ана та площиною геодезичного мерид≥ана. √еодезичний мерид≥ан проходить через нормаль до ел≥псоњда ј ≥ паралельний до пол€рноњ ос≥ –– '. √еодезична висота - в≥др≥зок по нормал≥ до ел≥псоњда в≥д поверхн≥ ел≥псоњда до пункту на ф≥зичн≥й поверхн≥ «емл≥.
ѕлоск≥ пр€мокутн≥ координати, в≥дом≥ з курсу топограф≥њ, обчислюютьс€ на площин≥ у комфорн≥й проекц≥њ √аусса- рюгера у шестиградусних зонах, а п≥д час зн≥манн€ у масштабах 1:5000 ≥ б≥льше - у триградусних зонах.
ќсьов≥ мерид≥ани шестиградусних зон на територ≥њ ”крањни - 21∞, 27∞, 33∞, 39∞, а триградусних зон - 21∞, 24∞, 27∞, 30∞, 33∞, 36∞, 39∞.
√еодезичн≥ висоти пункт≥в ƒ√ћ визначаютьс€ безпосередньо або обчис≠люютьс€ €к сума нормальноњ висоти й висоти кваз≥геоњда над ел≥псоњдом:
H = HHop+N, (≤њњ.3.1)
ѕросторов≥ супутников≥ мереж≥ (основи супутниковоњ геодез≥њ)
де Ќ - геодезична висота; Ќ - нормальна висота; N - висота кваз≥геоњда над
в≥дл≥ковим ел≥псоњдом. Ќормальн≥ висоти пункт≥в ƒ√ћ визначаютьс€ у Ѕалт≥йськ≥й систем≥ висот, вих≥дним пунктом €коњ Ї нуль ронштадтського футштока. Ќижче подано формули переходу в≥д ел≥псоњдальних геодезичних координат до просторових пр€мокутних координат X, Y, Z, €к≥ широко застосовують у косм≥чн≥й геодез≥њ:

|
X = (N' + H) cosBcosL;
| (III.3.2) |

|
Y = (N' + H) cos я-sin L; \
| де N' = |
рад≥ус першого вертикала; а, №- велика та
cosz ¬ + № sinz ¬ мала п≥вос≥ в≥дл≥кового ел≥псоњда.
ќбернений перех≥д в≥д X, Y, Z неминуче пов'€заний з ≥терац≥йним процесом обчисленн€ широти ¬ ≥ висоти Ќ. «ручн≥ дл€ обчисленн€ на комп'ютер≥ формули можна отримати ≥з системи р≥вн€нь (≤ѕ.3.2):

|
tgL = -
(III. 3.2)
‘ормули (III.3.3) дають змогу орган≥зувати цикл наближень. ƒл€ першого наближенн€ приймаЇтьс€ tgB = —. ƒл€ другого та наступних наближень за значенн€м ¬ з попереднього наближенн€ розраховують значенн€:

|
я = л/х2 + Y2 secB- N'; а
(Ў.3.4)
«азвичай дл€ дос€гненн€ розб≥жност≥ м≥ж наступним ≥ попередн≥м наближенн€ми ¬ = 0,03" достатньо трьох наближень. ѕерех≥д в≥д ел≥псо≠њдальних геодезичних координат ¬, L, Ќ до плоских координат X, Y студенти виконують п≥д час розрахунк≥в координат кут≥в рамки трапец≥њ плану масштабу 1:2000.
јстроном≥чн≥ широти й довготи, €к≥ визначаютьс€ на пунктах ATM, обчислюютьс€ в екватор≥альн≥й астроном≥чн≥й систем≥ координат (рис. ≤ѕ.3.2).
| –озд≥л III |

–ис. II1.3.2. ≈кватор≥альн≥ астроном≥чн≥ системи координат (екл≥птика не показана)
NS - горизонт; z - зен≥тна в≥ддаль супутника (дуга Zc);
QQ - екватор; h - висота супутника (дуга о );
– - полюс; 5 - схиленн€ супутника (дуга оћ);
N - точка п≥вноч≥; ќ— - пр€ме сходженн€ супутника (дуга ућ);
S - точка п≥вдн€; / - часовий кут супутника;
Z - точка зен≥ту; a - азимут супутника;
Z - точка надиру; ty - часовий кут точки весн€ного р≥вноденн€ (ty = t + a);
0-св≥тило-супутник; ф-широта
у- точка весн€ного р≥вноденн€;
як в≥домо, часовий кут точки весн€ного р≥вноденн€ ty числово дор≥внюЇ
зор€ному часу у момент спостережень у певн≥й точц≥ ј, а р≥зниц€ довгот ј’, у двох точках дор≥внюЇ р≥зниц≥ у час≥ в цих точках.
≈кватор≥альна система координат в≥дпов≥даЇ фундаментальному зор€ному каталогу на епоху загального вр≥вноваженн€ ƒ√ћ ≥ приводитьс€ до м≥жна≠родного умовного початку й системи астроном≥чних довгот X ћ≥жнародного бюро часу.
ѕросторов≥ супутников≥ мереж≥ (основи супутниковоњ геодез≥њ)
ƒл€ побудови ƒ√ћ використовуЇтьс€ атомний час, €кий задаЇтьс€ шкалою ƒержавного еталона часу й частоти (з урахуванн€м поправок за перех≥д до системи м≥жнародного координатного часу). ћасштаб ƒ√ћ задаЇтьс€ державним еталоном довжини - метром, за довжину €кого приймаЇтьс€ в≥дс≠тань, €ку проходить св≥тло у вакуум≥ за 1:299792458 частку секунди.
ћетролог≥чне забезпеченн€ геодезичних роб≥т зд≥йснюЇтьс€ ≥з вико≠ристанн€м метролог≥чноњ бази ƒержстандарту створенн€м мереж≥ в≥домчих вз≥рцевих базис≥в, основних довготних пункт≥в та еталонних азимут≥в.
ЌагадаЇмо, що у геодез≥њ використовуютьс€ не абсолютн≥, а в≥дносн≥ супутников≥ спостереженн€ ≥, по сут≥, застосовуЇтьс€ топоцентрична система координат. ѕр€мокутн≥ координати в ц≥й систем≥ будуть дор≥внювати р≥зниц≥ координат двох точок к≥нц≥в базисноњ л≥н≥њ 1 та 2.

|
(ѕ≤.3.5)
—феричн≥ координати у топоцентричн≥й систем≥ можуть бути визначен≥ за довжиною сторони ƒ2 та кутами Ћ ≥ ‘, аналог≥чними кутам а ≥ 8 в зор€н≥й систем≥ координат (рис. ≤ѕ.3.2).
«ауважимо, що коли за основну площину XOY прийн€то площину, €ка паралельна до екватора, то кут Ћ12 в≥драховуЇтьс€ в≥д мерид≥ана √ринв≥ча до про≠екц≥њ ƒ2 на цю площину. ут ‘12 характеризуЇ нахил л≥н≥њ ƒ2 до екватора.
ути Ћ ≥ ‘ в екватор≥альн≥й топоцентричн≥й систем≥ називають ор≥Їнту≠ючими кутами сторони ƒ2.

|
ути можна знайти за формулами
ј’
(≤ѕ.3.6)

|
«воротний перех≥д можна виконати за формулами
| (≤ѕ.3.7) |
cos ‘ ■ созЋ: ^ cos ‘ Х sin Ћ sin ‘.
ƒетальн≥ше це описано у [2].
–озд≥л III
111.3.3. ѕроектуванн€ та рекогностуванн€ просторових супутникових геодезичних мереж (—√ћ)
ќсновним завданн€м техн≥чного проектуванн€ —√ћ Ї оптимальне положенн€ пункт≥в на м≥сцевост≥, €ке залежить в≥д вартост≥ роб≥т, дотриманн€ заданоњ точност≥ та щ≥льност≥, однор≥дност≥ та правильноњ геометр≥њ, тривалого збереженн€ центр≥в.
ƒл€ складанн€ проекту, передус≥м, необх≥дно з≥брати дан≥ про ф≥зико-географ≥чн≥, економ≥чн≥ особливост≥ та ран≥ше виконан≥ геодезичн≥ роботи на територ≥њ. ≤нформац≥ю про геодезичн≥ роботи, виконан≥ ран≥ше, надаЇ ≥нспекц≥€ ƒержавного геодезичного нагл€ду. “ак≥ матер≥али м≥ст€ть:
Х загальний список ус≥х зв≥т≥в ран≥ше виконаних роб≥т, роки вико≠нанн€, назви орган≥зац≥њ виконанн€ роб≥т;
Х виписки з каталог≥в координат та висот пункт≥в, њхн≥ класи;
Х картки закладанн€ центр≥в;
Х схеми геодезичних побудов;
Х дан≥ про системи координат та висот.
ѕроект мереж≥ створюють на топограф≥чних картах масштаб≥в 1:200000-1:10000. Ќа карту нанос€ть вс≥ на€вн≥ пункти. Ќов≥ пункти необх≥дно роз≠ташовувати у вершинах р≥вносторонн≥х трикутник≥в. –екомендуютьс€ два найпоширен≥ш≥ методи побудови супутникових мереж:
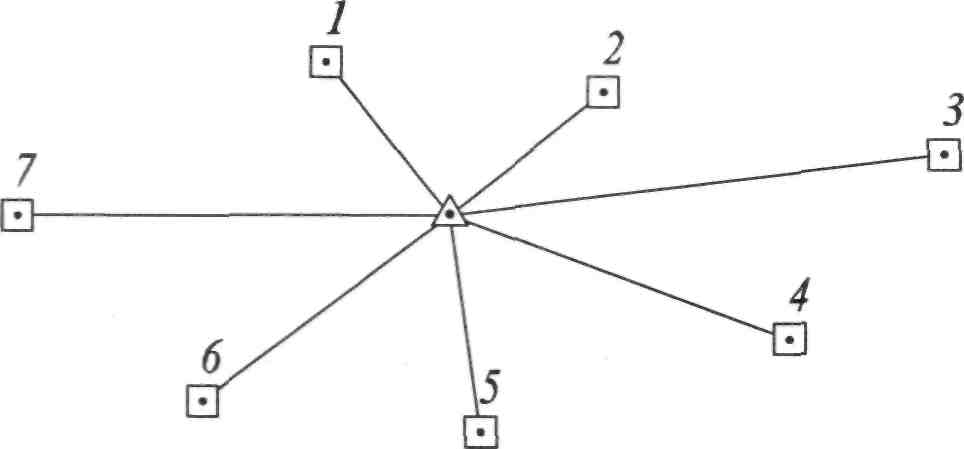
Х рад≥альний, коли вс≥ пункти мереж≥ координуютьс€ з одн≥Їњ рефе-ренцноњ або перманентноњ станц≥й (рис. ≤≤≤.«.«);
Х мережевий метод (метод замкнутих геометричних ф≥гур) -вим≥рюванн€ виконуютьс€ на кожн≥й л≥н≥њ або на кожному пункт≥ мереж≥ (рис. ≤≤≤.«.«).

ѕросторов≥ супутников≥ мереж≥ (основи супутниковоњ геодез≥њ)

|
–ис. 111.3.4. ћережевий метод побудови (однорангова мережа): /*\-референцний пункт; [√] - пункти, що визначаютьс€
Ќедол≥ками рад≥ального методу Ї неминуче виникненн€ довгих вектор≥в та в≥дсутн≥сть контрольних вим≥р≥в. ѕеревагою Ї те, що можна виконувати побудову одним приймачем ≥ те, що побудована мережа однор≥дна за точн≥стю.
онтролем у так≥й мереж≥ можуть бути т≥льки незалежн≥ вим≥рюванн€ ≥ншими приладами та в≥д ≥нших в≥домих точок. ритер≥й точност≥ ≥ над≥йност≥ вим≥р≥в п≥двищуЇтьс€, €кщо орган≥зуютьс€ мережев≥ вим≥рюванн€. Ќа практиц≥ застосовують дв≥ технолог≥њ мережевих побудов:
Х повторного вим≥рюванн€ на пунктах, дл€ €ких задаЇтьс€ к≥льк≥сть обов'€зкового повторного вим≥рюванн€ на кожн≥й мереж≥;
Х обов'€зкового вим≥рюванн€ кожноњ л≥н≥њ мереж≥.
ўоб позбутис€ довгих вектор≥в, необх≥дно мати дек≥лька референцних пункт≥в. Ќа жаль, виникають р≥зноточн≥ (багаторангов≥) мереж≥ (рис. ≤њњ.3.5). р≥м того, необх≥дно мати дек≥лька приймач≥в.

–озд≥л III
ћ≥н≥мальна к≥льк≥сть сес≥й (сеанс≥в) спостережень N дл€ мереж≥, €кщо к≥льк≥сть пункт≥в S ≥ використовуЇтьс€ R приймач≥в дл€ к≥лькост≥ повторних вим≥рювань ћ та к≥лькост≥ приймач≥в, €к≥ використовувались у попередн≥й та наступн≥й сес≥€х ќ, визначаЇтьс€ дл€ першоњ технолог≥њ (спостереженн€ на кожному пункт≥) за формулою

|
MS
(ѕ≤.3.8)
а дл€ другоњ технолог≥њ (вим≥рюванн€ кожноњ л≥н≥њ) за формулою
 (≤ѕ.3.9)
(≤ѕ.3.9)
ƒруга технолог≥€ (вим≥рюванн€ ус≥х вектор≥в) поширен≥ша.
Ќа рис. »≤.3.6 подано схему, €ка по€снюЇ посл≥довн≥сть вим≥рюванн€ ≥ перенесенн€ станц≥й дл€ другоњ технолог≥њ. Ќа схем≥ подано 20 пункт≥в, назви €ких складаютьс€ з букви та цифри. Ќаприклад, л≥вий верхн≥й пункт ј-1, нижн≥й правий пункт D-5 ≥ т. д. ”с≥х приймач≥в ш≥сть. ¬икористовувались три приймач≥, €к≥ залишалис€ на тих самих пунктах у попередн≥й та наступн≥й сес≥€х.

|
12 3 4 5
-≥ Ч (њ) Ч2Ч(Х)Ч «ЧQ) 4 (Х)
1\2

|
| “ому к≥льк≥сть сес≥й N = |
R-0 6-3
” перш≥й сес≥њ приймач≥ встановлен≥ на пунктах ј-1, ¬-1, —-1, ј-2, ¬-2, —-2. Ѕули вим≥р€н≥ с≥м вектор≥в. ƒал≥, дл€ виконанн€ другоњ сес≥њ приймач≥ з пункт≥в ј-1, ¬-1, —-1 були перенесен≥ на пункти ј-3, ¬-3, —-3. «нову в друг≥й
ѕросторов≥ супутников≥ мереж≥ (основи супутниковоњ геодез≥њ)
сес≥њ були вим≥р€н≥ с≥м вектор≥в ≥ так дал≥. ”сього у чотирьох сес≥€х були вим≥р€н≥ 28 вектор≥в.
” сес≥њ 5 на пунктах залишилось два приймач≥: на пунктах —-4, —-5. ≤нш≥ чотири приймач≥ з пункт≥в ј-4, ј-5, ¬-4, ¬-5 були перенесен≥ в пункти —-3, D-3, D-4, D-5. ¬им≥р€н≥ с≥м вектор≥в.
Ќарешт≥, у сес≥њ 6 два приймач≥ залишались на тих самих пунктах —-3, D-3, а приймач≥, що сто€ли на пунктах —-4, —-5, D-4, D-5, були встановлен≥ на пунктах —-1, —-2, D-l, D-2, вим≥р€н≥ дев'€ть вектор≥в.
” результат≥ ви€вилось, що на двох пунктах були виконан≥ однократн≥ вим≥рюванн€, на 12-ти пунктах - двократн≥ вим≥рюванн€, на 3-х - трикратн≥ ≥ на 3-х - чотирикратн≥ вим≥рюванн€. «розум≥ло, що точн≥сть визначенн€ координат неоднакова. ѕроте повторн≥ вим≥рюванн€ Ї доброю основою дл€ контролю вим≥рювань та дл€ над≥йноњ оц≥нки њхньоњ точност≥. Ќеобх≥дно пам'€тати, що п≥д час створенн€ великих мереж доц≥льно використовувати максимально можливу к≥льк≥сть приймач≥в. ÷е зумовить зменшенн€ к≥лькост≥ сес≥й, а, отже, приведе до скороченн€ часу на спостереженн€. ¬ ≥деальному випадку, коли к≥льк≥сть приймач≥в зб≥гаЇтьс€ ≥з к≥льк≥стю пункт≥в мереж≥, спостереженн€ виконуютьс€ за одну сес≥ю.
–озрахунок к≥лькост≥ вектор≥в W, що вим≥рюютьс€ у ц≥й сес≥њ, можна виконати за формулою
|
w = R(R -1) ^ (Ў.3.10)
де R - к≥льк≥сть приймач≥в.
«азначимо, що к≥льк≥сть одночасно вим≥р€них вектор≥в зростаЇ швидше н≥ж к≥льк≥сть приймач≥в.
| R | |||||||||||
| W |
ѕ≥д час проектуванн€ —√ћ з метою висотного прив'€зуванн€ необх≥дно передбачити включенн€ в мережу м≥н≥мум чотирьох висотних репер≥в в≥дпо≠в≥дного класу. « метою п≥двищенн€ над≥йност≥ та контролю визначенн€ параметр≥в переходу м≥ж ETRF-89 ≥ — -42 рекомендуЇтьс€ включати в —√ћ уже ≥снуюч≥ пункти того самого або вищого класу, розташован≥ на територ≥њ роб≥т ≥ визначен≥ т≥льки в систем≥ координат — -42.
ѕольове рекогностуванн€ пункт≥в мереж≥ зд≥йснюЇтьс€ на п≥дстав≥ за≠твердженого техн≥чного проекту.
–озд≥л III
–екогностуванн€ розпочинаЇтьс€ з в≥дшукуванн€ на м≥сцевост≥ та обстеженн€ стану на€вноњ геодезичноњ основи, до €коњ плануЇтьс€ прив'€зуванн€ нових пункт≥в. ќц≥нюЇтьс€ стан пункту; його збережен≥сть; порушенн€ зовн≥ш≠нього оформленн€; стан споруд, у €к≥ закладен≥ ст≥нн≥ знаки; на€вн≥сть ≥ розм≥р тр≥щин у ст≥нах; видим≥ зм≥щенн€ фундаменту. –епери, закладен≥ в зруйнован≥ споруди або споруди з видимими деформац≥€ми, розташован≥ б≥л€ зал≥зничних шл€х≥в, вважають нест≥йкими. ƒо нест≥йких належать також репери, закладено в споруди, навколо €ких Ї значна волог≥сть або €к≥ закладен≥ в м≥сцев≥сть з≥ штучним або природним зволоженн€м ірунту, у торф'€никах тощо.
–екогностувальна бригада виконуЇ в≥дновлювальн≥ роботи: бетонуЇ в≥дколений кут п≥лона, наносить протиероз≥йну сум≥ш на марку, верхню час≠тину репера, в≥дновлюЇ розп≥знавальний знак та стовп ≥з охоронним написом, зовн≥шнЇ оформленн€.
¬ажливим завданн€м рекогностуванн€ Ї уточненн€ на м≥сцевост≥ м≥сць закладанн€ нових репер≥в.
¬важають за доц≥льне поЇднувати рекогностуванн€ ≥з закладанн€м нових пункт≥в. ѕункти дл€ супутникових спостережень вибирають з дотриманн€м таких вимог:
Х в≥дсутн≥сть на висот≥ 15∞ над горизонтом перешкод дл€ проходженн€ рад≥осигнал≥в;
Х в≥дсутн≥сть поблизу пункту в≥дбивних поверхонь (металев≥ дахи, водн≥ поверхн≥, рекламн≥ щити, металев≥ огорож≥);
Х в≥дсутн≥сть поблизу джерел електромагн≥тного та рад≥овипро≠м≥нюванн€;
Х в≥ддален≥сть в≥д дор≥г (з погл€ду безпеки та вплив≥в в≥брац≥њ п≥д час спостережень).
ќкр≥м пункт≥в мереж≥, на в≥дстан≥ 500-1000 м закладаютьс€ два ор≥Їн≠тирн≥ пункти, на €к≥ забезпечуЇтьс€ видим≥сть (земл€-земл€). ” раз≥ немож≠ливост≥ виконанн€ супутникових спостережень над центром знака допускаЇтьс€ встановленн€ антени приймача поза центром, але елементи приведенн€ повинн≥ бути м≥н≥мальними, а п≥д час висотного прив'€зуванн€ повинна бути можлив≥сть передаванн€ висоти на антену приймача геометричним н≥велю≠ванн€м.
” результат≥ виконанн€ рекогностуванн€, буд≥вельних роб≥т подаютьс€ так≥ документи:
Х остаточна схема мереж≥;
Х уточнен≥ схеми прив'€зувальних л≥н≥й, передаванн€ висот через водн≥ перешкоди;
ѕросторов≥ супутников≥ мереж≥ (основи супутниковоњ геодез≥њ)
Х акти обстеженн€ та оновленн€ пункт≥в;
Х карти рекогностуванн€, обстеженн€, оновленн€ та побудови гео≠дезичних пункт≥в;
Х акти втрати пункт≥в;
Х акти перезакладанн€ центр≥в;
Х акти здач≥ пункт≥в на збер≥ганн€.
«а результатами рекогностуванн€ складають к≥нцевий проект мереж≥ ≥ загальну програму виконанн€ роб≥т ≥з зазначенн€м супутникових технолог≥й, €кими будуть виконуватис€ вим≥рюванн€. ÷≥ дан≥ подаютьс€ в техн≥чному зв≥т≥ про результати рекогностуванн€ та закладанн€ знак≥в. √раф≥к виконанн€ й зак≥нченн€ роб≥т створюЇтьс€ в≥дпов≥дно до обс€г≥в роб≥т та можливостей виконавц€.
ошторис на виконанн€ роб≥т складають зг≥дно з нормативними доку≠ментами, затвердженими ƒержавною геодезичною службою ”крањни.
III.3.4. —кладанн€ робочого проекту
ѕеред вињздом на польов≥ роботи дл€ створенн€ —√ћ на основ≥ техн≥чного завданн€ ≥ техн≥чного зв≥ту складають робочий проект спостереженн€ мереж, €кий затверджуЇтьс€ в робочому пор€дку.
” робочому проект≥ детально висв≥тлюютьс€ розд≥ли: "ќрган≥зац≥€ роб≥т" ≥ "ѕольов≥ роботи". ¬их≥дними даними дл€ складанн€ робочого проекту, кр≥м техн≥чного завданн€ проекту, зв≥ту про рекогностуванн€ та закладенн€ пункт≥в, Ї максимальна к≥льк≥сть приймач≥в, њхн≥ типи, в≥дпов≥дно - к≥льк≥сть виконавц≥в-спостер≥гач≥в та к≥льк≥сть одиниць транспорту.
ѕ≥д час складанн€ граф≥чноњ частини робочого проекту на картах вищого масштабу, н≥ж у техн≥чному проект≥, нанос€ть пункти супутниковоњ мереж≥, вибран≥ €к основн≥ та резервн≥. Ќа тих самих картах вибирають оптимальн≥ шл€≠хи перем≥щенн€ м≥ж пунктами ≥ на њхн≥й основ≥ складають схему перем≥щень на об'Їкт≥ роб≥т ≥з в≥дзначенн€м м≥сць ≥ часу зустр≥ч≥ дл€ концентрац≥њ ≥нформац≥њ, м≥сць переправ через водн≥ перешкоди, схеми рад≥озв'€зку тощо.
«а допомогою програм, що вход€ть у супутников≥ приймач≥, уточнюютьс€ методи побудови ≥ будуютьс€ граф≥ки пониженн€ геометричного фак≠тора GDOP.
ќск≥льки пер≥од обертанн€ супутника навколо «емл≥ становить близько 12 годин, ц≥ граф≥ки повтор€ютьс€ з такою самою пер≥одичн≥стю. “ому граф≥ки складають ≥з розрахунку один граф≥к на 7-ё дн≥в. ¬загал≥ ув≥мкненн€ приймач≥в доц≥льно проектувати на н≥чний пер≥од доби, найспри€тлив≥ший дл€ спостережень. “од≥ св≥тлий пер≥од доби можна використовувати дл€ пере≠м≥щенн€ по об'Їкту.
–озд≥л III

|
Ў¬≤кна, спри€тлив≥ дл€ вим≥рювань ≥ ¬≥кна, неспри€тлив≥ дл€ вим≥рювань
–ис. II1.3.7. √раф≥к зниженн€ геометричного фактора на пункт≥
ѕопередньо з'€совують ≥нтервали часу з≥ спри€тливими DOP на кожну добу на пер≥од спостережень. ÷≥ ≥нтервали уточнюютьс€ з отриманн€м нового альманаху ефемерид.
«а на€вност≥ великомасштабних карт складають таблиц≥ або зарис перешкод на пункт≥.
ѕосл≥довн≥сть роботи п≥д час камерального визначенн€ перешкод навколо пункту спостережень така: на план≥ масштабу 1:5000-1:500 транспортиром виз≠начають азимути з пункту на ближн≥ точки перешкод з урахуванн€м зближенн€ л≥н≥й с≥тки та схиленн€ магн≥тноњ стр≥лки. “очн≥сть азимута - не грубше за 20'. ¬ертикальний кут визначають за формулою

де 5 - в≥ддаль до перешкоди, що визначаЇтьс€ за допомогою вим≥рника та поперечного масштабу; висоту перешкоди h знаход€ть, використовуючи ≥нформац≥йне навантаженн€ плану (к≥льк≥сть поверх≥в у споруд≥, висоту дерев, рельЇф тощо).
якщо великомасштабних план≥в на район роб≥т немаЇ, зариси складають п≥д час рекогностуванн€.
–озробл€Їтьс€ програма спостережень на окремих пунктах або програма спостереженн€ на кожний день. ” табл. ≤њњ.3.1 подано план орган≥зац≥њ сес≥њ на один день.
ѕрограмою заплановано п'€ть сес≥й. ”с≥х приймач≥в та в≥дпов≥дно виконавц≥в п'€ть.
ѕросторов≥ супутников≥ мереж≥ (основи супутниковоњ геодез≥њ!)
“аблиц€ ѕ≤. 3.1
ѕрограма спостережень на один день
| є сес≥й | „ас спостере≠жень | ѕриймач≥ | ≤ | II | III | IV | V |
| —посте≠р≥гач≥ | |||||||
| gJ5_n00 | Ќомери пункт≥в | ||||||
| 1√-1240 | |||||||
| 13№-14≤№ | |||||||
| 14j5-15jU | |||||||
| 15"-16зи |

–озд≥л III
ƒ≥аграма перешкод по горизонту на пункт≥ ƒ√ћ ѕ≥вн≥ч

–ис. 111.3.8. ƒ≥аграми перешкод по горизонту на пункт≥ ƒ√ћ (продовженн€)
ћережа, що спостер≥гаЇтьс€, маЇ один референцний пункт. Ќа цьому пункт≥ (є 1019) приймач IV виконуЇ спостереженн€ без перењзд≥в. ≤нш≥ 20 пункт≥в - роверн≥: приймач≥ зм≥нюють положенн€ м≥ж сес≥€ми. „ас виконанн€ першоњ сес≥њ вибирають, враховуючи необх≥дн≥сть одночасного виконанн€ умови видимост≥ ≥ геометричноњ конф≥гурац≥њ суз≥р'€ супутник≥в на вс≥х пунктах, €к≥ зад≥€н≥ в сес≥њ. “ому тривал≥сть цього ≥нтервалу спостережень сес≥њ повинна перевищувати тривал≥сть вим≥рюванн€ будь-€кого вектора. «агальна тривал≥сть вим≥рюванн€ будь-€кого вектора складаЇтьс€ з часу, необх≥дного дл€ виконанн€ таких операц≥й:
ѕросторов≥ супутников≥ мереж≥ (основи супутниковоњ геодез≥њ)
в≥дшукуванн€ центра - 10-15 хв;
встановленн€ та п≥д'Їднанн€ приймача - 5-10 хв;
≥н≥ц≥ал≥зац≥€ приймача - до 10 хв;
безпосередн≥ вим≥рюванн€ - зг≥дно з розрахунками;
згортанн€ приймача ≥ п≥дготовленн€ до - 5-10 хв.
перевезенн€
ќкремим розд≥лом робочого проекту Ї проект висотного прив'€зуванн€
мереж≥.
“ривал≥сть статичних супутникових спостережень встановлюЇтьс€ зг≥дно з такими вимогами:
| лас ƒ√ћ | ¬≥дстан≥ м≥ж пунктами, км | “ривал≥сть | ѕрим≥тка |
| 150-300 | 5-6 д≥б | ‘ундаментальна мережа | |
| 50-150 | 1-3 д≥б | ѕропорц≥йно до довжини вектора | |
| 10-20 | 2,5 год | ƒвочастотний приймач | |
| 5-10 | 30 хв-1 год | ƒвочастотний приймач (пропор. довж. вект.) | |
| 5-ё | 1-1,5 год | ќдночастотний приймач (пропор. довж. вект.) | |
| 2-10 | 15-30 хв | ƒвочастотний приймач (пропор. довж. вект.) | |
| 2-ё | 20 хв-1 год | ќдночастотний приймач (пропор. довж. вект.) |
ѕо€снювальна записка до робочого проекту повинна м≥стити так≥ матер≥али:
Х проектн≥ роботи ≥з зазначенн€м ус≥х пункт≥в та репер≥в, €к≥ зад≥€н≥ у спостереженн€х ≥ вс≥х вектор≥в, що п≥дл€гають вим≥рюванню;
Х програма роб≥т на об'Їкт≥ з в≥дображенн€м пер≥оду та часу роботи на пункт≥, маршрут≥в перем≥щенн€ на об'Їкт≥;
Х роздрукован≥ граф≥ки зниженн€ геометричного фактора та граф≥ки-зариси на пунктах, де Ї перешкоди;
Х технолог≥€ виконанн€ роб≥т з обірунтуванн€м вибору методу вим≥рюванн€ та часу спостереженн€ на пунктах.
111.3.5. ѕ≥дготуванн€ комплексу прилад≥в до польового вим≥рюванн€
ѕеред вињздом на польов≥ роботи кер≥вник роб≥т проводить ≥нструктаж з ус≥ма кер≥вниками бригад ≥ видаЇ кожн≥й бригад≥ робочий проект або в≥дпов≥дн≥ вит€ги з нього.
–озд≥л III
ожна бригада укомплектовуЇтьс€ приладами, необх≥дними дл€ вико≠нанн€ польових роб≥т, обладнанн€м та матер≥алами.
ѕодамо детальний список усього необх≥дного обладнанн€:
Х автомоб≥ль (бажано п≥двищеноњ прох≥дност≥);
Х приймач ≥з комплектом допом≥жного обладнанн€;
Х додатковий запам'€товувальний пристр≥й;
Х 2 комплекти кабел≥в;
Х 2 акумул€тори (≥з комплекту приймача або автомоб≥льн≥);
Х зар€дний пристр≥й дл€ акумул€тор≥в;
Х переговорний пристр≥й з 2 акумул€торами (один запасний ≥з зар€дним пристроЇм до нього);
Х штатив;
Х оптичний центрир;
Х комплекс метеоролог≥чних прилад≥в (еталонований психрометр ≥з "сухим" та "мокрим" термометрами), а також барометр-анероњд;
Х оптичний теодол≥т («ќ") дл€ зн≥манн€ елемент≥в приведенн€ п≥д час встановленн€ антени приймача поза центром;
Х н≥вел≥р ≥з р≥внем або компенсатором;
Х складна шашкова рейка з р≥внем;
Х л≥хтарики;
Х бусоль;
Х рулетка 20 м;
Х ≥нструменти дл€ др≥бного ремонту та юстуванн€ прилад≥в;
Х комплект карт масштабу 1:50000Ч1:25000 на район вим≥рюванн€;
Х робочий проект мереж≥ (або вит€г з нього) з≥ схемами та списком пункт≥в, на €ких будуть виконуватис€ спостереженн€ та прив'€зуванн€, граф≥ки виконанн€ вим≥рюванн€ та зазначатис€ ≥нформац≥€ про доњзди до них;
Х картка рекогностуванн€, обстеженн€, оновленн€ та побудови гео≠дезичних пункт≥в (репер≥в);
Х журнали супутникових спостережень;
Х лист граф≥чного та анал≥тичного визначенн€ елемент≥в центруванн€ антени супутникового приймача;
Х медична аптечка дл€ наданн€ першоњ допомоги.
ѕеред початком польового сезону супутников≥ приймач≥ повинн≥ пройти еталонуванн€ на вз≥рцевих базисах або метролог≥чних пол≥гонах. ѕовторно еталонуванн€ виконуЇтьс€ п≥сл€ кожного сильного струсу або ремонту антен ≥ рад≥очастотних блок≥в приймача. ѕ≥д час транспортуванн€ та перенесенн€
ѕросторов≥ супутников≥ мереж≥ (основи супутниковоњ геодезш)
приймач потр≥бно обер≥гати в≥д удар≥в та пошкодженн€. «апам'€товуввальн≥ пристроњ, €к≥ вход€ть до комплекту приймача, необх≥дно збер≥гати в сухому м≥сц≥ та обер≥гати в≥д температурних вплив≥в, удар≥в, згин≥в, стежити, щоб поверхн€ роз'Їм≥в була чистою ≥ незапиленою.
111.3.6. Ѕудова та техн≥чн≥ характеристики компактного одночастотного приймача GPS ProMark-2
” цьому параграф≥ та у двох наступних буде детально розгл€нуто питанн€ будови та можливостей застосуванн€ компактного приймача –гоћагк-2 ф≥рми Ashtech (—Ўј) дл€ побудови геодезичних мереж та топограф≥чного зн≥манн€. ƒетал≥зац≥€ цього питанн€ можлива т≥льки п≥д час вивченн€ конкретного приймача, хоча вс≥ приймач≥ GPS мають багато сп≥льних загальних систем, вузл≥в та деталей. –гоћагк-2 - повнофункц≥ональна GPS система, що розв'€зуЇ задач≥ точного геодезичного вим≥рюванн€ та нав≥гац≥њ. омплект системи –гоћагк-2 складаЇтьс€ ≥з двох або б≥льше приймач≥в з антенами та допом≥ж≠ними компонентами.
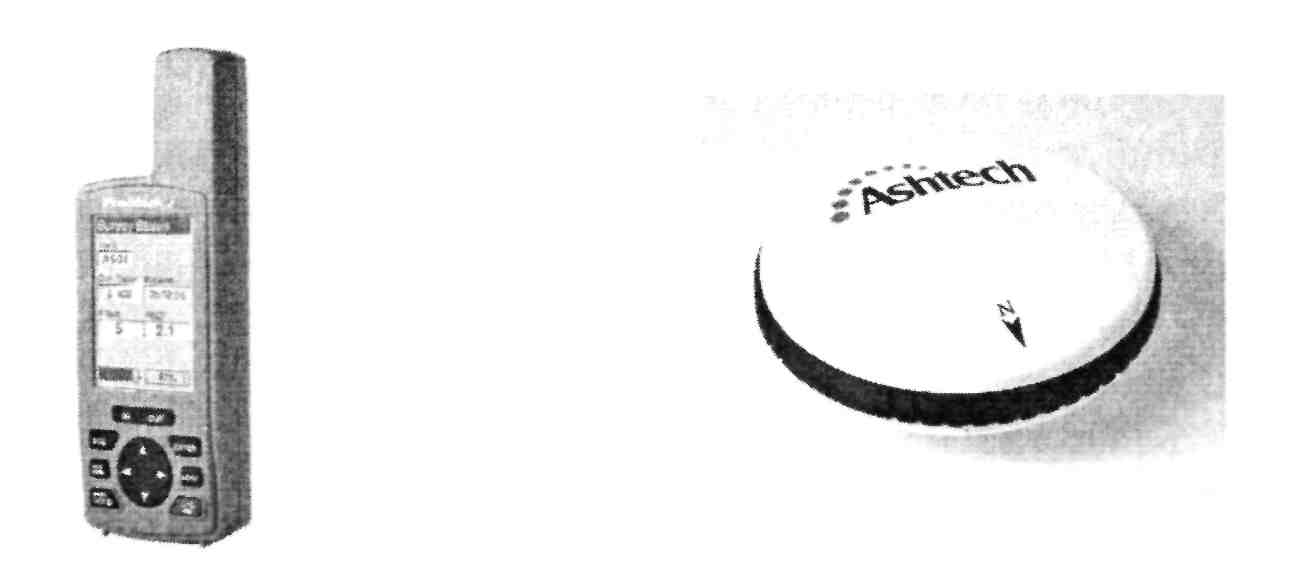
ѕриймач, завд€ки своњй компактност≥, менший за варт≥стю пор≥вн€но з ≥ншими приймачами, а також довол≥ високий за точн≥стю вим≥рюванн€, широко застосовуЇтьс€ у геодезичному виробництв≥. р≥м ф≥рми Ashtech, аналог≥чний приймач виготовл€Ї ф≥рма Magellan Corporation, названий ProMark X-CM, a ф≥рма Ashtech почала випускати модиф≥кований приймач –гоћагк-3. ѕриймач –гоћагк-2 отримуЇ та збер≥гаЇ неопрацьован≥ дан≥ з GPS-супутник≥в про кожну точку зн≥манн€. ƒан≥ ≥з приймача п≥зн≥ше п≥ддаютьс€ пост-опрацюванню з метою визначенн€ положенн€ точок зн≥манн€. «овн≥шн≥й вигл€д приймача показано на рис. Ў.3.9.
|
–ис. II1.3.9. GPS-приймач ProMark-2 –ис. ≤II. 3.10. «овн≥шн€ GPS-антена
–озд≥л III
якщо дл€ нав≥гац≥њ достатньо вмонтованоњ у приймач антени, то дл€ отриманн€ даних точного геодезичного зн≥манн€ необх≥дна зовн≥шн€ антена (рис. ≤њњ.3.10)
«овн≥шн€ антена маЇ точку, у €к≥й ф≥зично збираютьс€ дан≥ з GPS-супутник≥в про положенн€ (просторов≥ координати) саме ц≥Їњ точки. “ому ц€ точка антени повинна пр€мовисною л≥н≥Їю проектуватис€ на центр геоде≠зичного знака або точки м≥сцевост≥, положенн€ €коњ визначаЇтьс€. јнтена центруЇтьс€ за допомогою оптичного центрира та стандартного штатива або GPS-штатива.
«овн≥шн≥й антенний кабель (рис. ≤ѕ.3.11) п≥д'ЇднуЇтьс€ до –гоћагк-2 через задню частину польового утримувача приймача. ћаленький роз'Їм п≥д'ЇднуЇтьс€ до приймача, великий роз'Їм - до антени.
¬ертикальний подовжувач антени (рис. ≤ѕ.3.12) забезпечуЇ можлив≥сть п≥д'Їднанн€ антени, коли вона встановлена на штатив. …ого довжина 76,2 мм.
ƒо комплекту приймача входить вим≥рювальна рулетка дл€ вим≥рюванн€ висоти антени над центром знака (рис. ≤ѕ.3.13).

|
–ис. 111.3.11. «овн≥шн≥й –ис. ≤ѕ.3.12. ¬ертикальний –ис. III.3.13. ¬им≥рювальна
антенний кабель подовжувач антени рулетка
ѕочаток рулетки ф≥ксуЇтьс€ у вињмц≥, розташован≥й збоку на корпус≥ антени. ¬ит€гуЇтьс€ рулетка вниз у напр€мку до центра знака так, щоб загострений штир, розташований на корпус≥ рулетки, торкнувс€ знака. ” цю мить беретьс€ в≥дл≥к шкали рулетки. ¬≥дл≥к даЇ не вертикальну, а похилу висоту антени над центром знака. ÷€ висота може бути приведена до вертикальноњ висоти. ƒостатньо знати рад≥ус антени.
ќф≥сний утримувач приймача з кабелем завантаженн€. ÷ей тримач даЇ змогу п≥д'Їднати приймач –гоћагк-2 до оф≥сного комп'ютера з метою завантаженн€ в комп'ютер даних GPS-зн≥манн€. як т≥льки приймач установлюЇтьс€ на тримач, кабель завантаженн€ автоматично п≥д'ЇднуЇтьс€ до приймача через контакти, що розм≥щен≥ на задн≥й частин≥ приймача. ќф≥сний утримувач ≥з кабелем показано на рис. Ў.3.14.
ѕросторов≥ супутников≥ мереж≥ (основи супутниковоњ геодезш)

|

–ис. ≤≤≤.3.14. ќф≥сний утримувач приймача –ис. ≤≤≤.3.15. омпакт-диск з програмою
з кабелем завантаженн€ Ashtech Solutions та ≥нструкц≥€
користувача

ƒо комплекту приладу входить програма постопрацюванн€ (Ashtech Solutions) (рис. ≤ѕ.3.15).
ѕрограма маЇ модул≥, €к≥ забезпечують завантаженн€ та опрацюванн€ супутникових даних ≥з кожного приймача –гоћагк-2. ѕрограмне забезпеченн€ записане на компакт-диск. Ashech Solutions User's Guide - ≥нструкц≥€ з вико≠ристанн€ оф≥сного програмного забезпеченн€ з метою плануванн€ завантаженн€ ≥ постопрацюванн€ даних.
–озд≥л III
ƒо комплекту приймача ще входить польова сумка дл€ транспортуванн€ приладу, а також компакт-диск (Map Send Streets). омпакт-диск маЇ т≥льки карти на територ≥ю —Ўј. ƒиск не входить до комплекту системи приймача, €кий продаЇтьс€ за кордоном —Ўј.
р≥м того, п≥д час роботи з приймачем необх≥дно додатков≥ предмети, €к≥ не вход€ть до стандартного комплекту. —еред таких предмет≥в Ї штатив, п≥дставка (трегер-нос≥й) та адаптер антени. Ќа рис. ≤ѕ.3.16, б показано ц≥ три предмети окремо та в з≥браному вигл€д≥ разом з антеною та штативом (рис. ѕ≤.3.16,а).
” трегер антени вмонтовано оптичний центрир та п≥д≥ймальн≥ гвинти дл€ приведенн€ антени в робочий стан.
ѕ≥д час роботи у псевдок≥нематичному та к≥нематичному режимах дл€ кр≥пленн€ –гоћагк-2 може бути використана в≥ха, показана на рис. ≤ѕ.3.17.

|

|
–ис. III. 3.17. GPS-eixa –ис. III. 3.18. лав≥ш≥ приймача
Ќа рис. ≤њњ.3.9 показаний загальний вигл€д приймача.
Ќа рис. ѕ≤.3.18 показана панель керуванн€ приймачем - кер≥вн≥ клав≥ш≥.
” таблиц≥ III.3.2 описано функц≥њ кожноњ клав≥ш≥.
Ќа рис. III.3.19 показано три в≥кна, €к≥ дають змогу виконувати редагуванн€, описуванн€ (≥дентиф≥кац≥ю) пункт≥в, вводити або зм≥нювати де€к≥ параметри Site ID, Site description i Receiver ID.
ѕодамо дал≥ де€к≥ дан≥ про терм≥н роботи джерел електроенерг≥њ. ∆ивленн€ приймача Pro Mark-2 зд≥йснюЇтьс€ за допомогою двох стандартних батарей типу јј. “акож можна використовувати будь-€к≥ батарењ цього типу €к одноразов≥ (лужн≥, л≥т≥Їв≥), так ≥ перезар€дн≥ (н≥кель-кадм≥Їв≥, н≥кель-метал-г≥дридн≥, лужн≥). Ќайдовше працюють л≥т≥Їв≥ батарењ, пот≥м лужн≥. “ерм≥н
ѕросторов≥ супутников≥ мереж≥ (основи супутниковоњ геодез≥њ)
роботи батарей значною м≥рою залежить в≥д температури пов≥тр€. “ак, €кщо температура пов≥тр€ -10 ∞—, терм≥н д≥њ батарей - 2,5 години. ƒл€ +10 ∞— ~ 6 годин, дл€ +20 ∞— - 9 годин. ћенше залежать в≥д температури л≥т≥Їв≥ батарењ (дл€ -10 ∞— - 10 годин; дл€ +10 ∞— - 12 годин). ѕриймач п≥д час роботи показуЇ стан батарей. ѕерший такий сигнал - Low Battery (Ќизький р≥вень зар€дки ALARM). „ас прац≥ п≥сл€ такого сигналу дл€ к≥мнатноњ температури дор≥внюЇ приблизно 1 годин≥, а дл€ 10 ∞— - 10 хвилин.
“аблиц€ III. 3.2

