




В общем случае преобразования на плоскости (Слайд 7) представляют в виде линейных зависимостей новых координат от старых. Такие преобразования удобно переписывать в матричной форме: векторная строка из двух компонентов в виде старых (стартовых) координат x, y умножается на матрицу  , элементы которой – коэффициенты при линейных координатах, связанных с преобразованиями масштабирования, поворота и сдвига. К ним добавлена вектор-строка коэффициентов, связанных с параллельным переносом.
, элементы которой – коэффициенты при линейных координатах, связанных с преобразованиями масштабирования, поворота и сдвига. К ним добавлена вектор-строка коэффициентов, связанных с параллельным переносом.

В практике удобно избавиться от слагаемого, связанного с параллельным переносом, и представить всё в виде матрицы, которая обеспечивает все четыре вида преобразований.
Матричная запись удобна. Лучше иметь единое произведение исходного вектора с координатами точки на матрицу преобразования, чем выражение в виде суммы разных слагаемых.
3. Однородные координаты и геометрические преобразования: слайд 8
Для преобразования матрицы аффинных преобразований к более удобному виду принято рассматривать так называемые однородные координаты. Эта тема (теория) рассматривается в проективной геометрии.
Суть преобразования состоит во введении в оборот дополнительной координаты. Формально - обычной паре координат x и y на плоскости ставится в соответствие тройка координат в некотором трёхмерном пространстве:
.  .
.
Пусть W=1, тогда тройка координат получит вид
(x,y) = (x, y, 1)
А матричные преобразования 2х2 можно видоизменить, записав их с помощью однородной координаты в виде матрицы 3х3, добавив третью строку и третий столбец.

В качестве третьей координаты добавлена компонента W (обозначение может быть разным h, S, H и т. п.). Эту компоненту можно считать нормирующим множителем. Применение однородных координат даёт ряд плюсов.
1. Используя координату W как нормирующий множитель можно получать удобную форму для хранения в памяти машины значений координат в более рациональном виде.
2. Все преобразования, что были записаны раньше, могут быть пересчитаны также в более удобном виде как единое произведение матрицы–строки координат на матрицу преобразования.
Слагаемое, связанное с параллельным переносом может быть занесено в 3-ю строку, в предположении, что W=1.
На самом деле параллельный перенос не влияет на свободный вектор и его применяют только к радиус-вектору, который задаёт отдельную точку на плоскости (или в пространстве).
Если W=0, то получим точку в бесконечности, т. е. получим направление радиус-вектора, указывающего, где может находиться точка в бесконечности (например, направление полёта снаряда). Этим пользуются (приравнивая W=0) и когда надо показать отличие радиус-вектора от точки или получить направление радиус-вектора к точке в бесконечности.
Запись: W=1 = > X, Y, W – это точка, а запись: W=0 = > X, Y, 0 – это свободный вектор или его направление.
Если в уравнении преобразования подставить W=0, то никакого параллельного переноса мы не получим, но возможно масштабирование, поворот и сдвиг объекта по линии направления свободного вектора.
Перепишем все, ранее составленные матрицы преобразования с добавлением однородных координат. Вот что из этого получается: (Слайд 9)
~ translation (перенос)
T(dx, dy) = 
Сдвиг
~ shear by x (сдвиг по x)
shx (shx) = 
~ shear by y (сдвиг по y)
Shy (shy) = 
~ scaling (масштабирование)
S (sx, sy) = 
~ rotation (вращение)
R (α) = 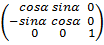
Все матрицы получились 3×3, все матрицы квадратные, все преобразования имеют обратное представление (обратные матрицы). Определитель всех матриц detA ≠ 0 и преобразования можно осуществлять как в одну сторону, так и в другую.

