




Обобщенная структурная схема САР представлена на рис. 2.10.

| 
|
| а | б |
| Рис. 2.10. Структурная схема САР: а – разомкнутой системы по каналу задающего воздействия; б – то же, но замкнутой системы | |
Для системы регулирования, показанной на рис. 2.10, а, ее амплитудно-фазовая характеристика (АФХ) определяется выражением
W(jω) = Wp(jω) · Wоб(jω), (2.5)
где Wp(jω) – АФХ регулятора;
Wоб(jω) – АФХ объекта регулирования.
Если комплексная частотная характеристика регулятора будет
Wp(jω) = kp, (2.6)
то АФХ всей системы запишется в виде
W (jω) = kp · Wоб(jω). (2.7)
Следовательно, при подключении к объекту регулятора с АФХ (2.6) АФХ системы на каждой частоте увеличивается в kp раз.
Такие регуляторы называются пропорциональными (П-регуляторы) и имеют один параметр настройки – коэффициент передачи kp.
Переходные процессы в П-регуляторе описываются выражением
μ = kp · ε, (2.8)
где ε – входное воздействие на регулятор, равное отклонению регулируемой величины от заданного значения;
μ – воздействие регулятора на объект, направленное на ликвидацию отклонения регулируемой величины от заданного значения.
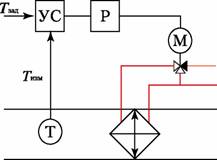
На рис. 2.11. приведен пример контура регулирования температуры приточного воздуха в канальном кондиционере. Температура воздуха поддерживается водяным калорифером, через который пропускается теплоноситель. Воздух, проходя через калорифер, нагревается. Температура воздуха после водяного калорифера измеряется датчиком (Т), далее эта величина поступает на устройство сравнения (УС) измеренного значения температуры (Тизм) и заданного (Tзад). В зависимости от разности между температурой уставки и измеренным значением температуры регулятор (Р) вырабатывает сигнал, воздействующий на исполнительный механизм (М – электропривод трехходового клапана). Электропривод открывает или закрывает трехходовой клапан до положения, при котором ошибка ε = Tзад – Тизм будет стремиться к нулю.
Выходным сигналом регулятора может быть напряжение в определенном диапазоне (например, постоянное напряжение в диапазоне от 0 до 10 В, ток 0–20мА и т. д).
Диапазон изменения выходного сигнала называется диапазоном регулирования (рис.2.12). Диапазон изменения сигнала ошибки называют пропорциональным диапазоном.
В П-регуляторах имеется возможность изменять диапазон регулирования и пропорциональный диапазон.
|
| Рис. 2.11. Контур регулирования температуры приточного воздуха в канале центрального кондиционера |

|
| Рис. 2.12. График пропорционального регулирования |
Из графика (рис. 2.12.) видно, что чем меньше пропорциональный диапазон, тем круче характеристика регулирования. Кривая (1) соответствует диапазону изменения температуры 0–10 °С, а кривая (2) – диапазону 0–4°С.
Величина kp =  есть коэффициент регулирования. В первом случае kp = 1, а во втором kp = 2,5.
есть коэффициент регулирования. В первом случае kp = 1, а во втором kp = 2,5.
При больших значениях kp в контуре регулирования могут возникнуть колебания (рис.2.13.). Так, если во время включения системы температура воздуха Тизм ниже заданной температуры Tзад, устройство управления выдает большой сигнал на открытие трехходового клапана. Температура водяного калорифера и приточного воздуха начнет повышаться.
Когда температура приточного воздуха после водяного калорифера достигает Tзад, устройство управления выдает команду на закрытие трехходового клапана (точка t1, рис. 2.13).
Однако из-за того, что калорифер разогрет, температура приточного воздуха до момента t2 еще будет расти, а затем начнет снижаться. Этот процесс имеет вид затухающих колебаний, и через определенное время (t3) процесс стабилизируется.
После стабилизации из-за инерционности системы всегда будет существовать статическая ошибка Δст = Tзад – Тизм.
Сигнал на выходе устройства управления будет иметь вид
y(t) = U0 + kp · ε, (2.9)
где U0 – сигнал на выходе устройства управления при ε = 0.

|
| Рис. 2.13. Переходной процесс при пропорциональном (П) регулировании |
Чем большим выбран пропорциональный диапазон регулирования, тем большей будет величина статистической ошибки. При малой величине пропорционального диапазона увеличивается время переходных процессов, и при некоторых условиях может возникнуть автоколебательный (незатухающий) процесс в контуре регулирования.
Путем выбора параметров регулирования П-регулятора можно существенно уменьшить установившуюся ошибку регулирования, однако ее полное устранение непредставляется возможным даже теоретически.
Из рис. 2.11. видно, что в цепочке регулирования в реальном регуляторе установлено еще одно звено – исполнительный механизм (М). В данном случае – это электродвигатель привода трехходового клапана. Электрический привод является интегрирующим звеном иего влияние по возможности уменьшают, используя обратные связи. Это связано с тем, что динамические свойства участка, охваченного обратной связью, независят от динамических свойств прямого участка, а определяются в основном динамическими свойствами звена обратной связи. Эта особенность широко используется напрактике при разработке автоматических регуляторов.
Исходя из этого, для устранения влияния исполнительного механизма его необходимо охватить отрицательной обратной связью. Для повышения коэффициента передачи прямого канала отрицательной обратной связью нужно охватить и усилительное звено регулятора. Такие П-регуляторы, называемые позиционерами, можно представить в виде последовательного соединения собственно П-регулятора и некоторого балластного звена с постоянной времени Тб.
На рис. 2.14 представлена структурная схема П-регулятора, а на рис. 2.15 – реализуемый ею закон регулирования.

| 
|
| Рис. 2.14. Структурная схема П-регулятора | Рис. 2.15. Закон П-регулирования |
Параметром настройки регулятора является коэффициент передачи устройства обратной связи kос. Коэффициент передачи регулятора kп тем больше, чем меньше kос. Однако следует иметь в виду, что чем больше kп, тем больше постоянная времени балластного звена и тем больше искажается идеальный закон П-регулирования.

