




7.1 Основные способы математического описания.
Математическое описание автоматической системы управления – это описание процессов, протекающих в системе на языке математики.
Построение любое системы управления начинается с изучения объекта управления и составления его математического описания.
В качестве объекта может выступать аппарат, технологический процесс, производство, предприятие и отрасль. Различие математических моделей объектов обуславливается их назначением. Эти модели описывают различные режимы работы объекта или системы управления и могут быть получены одним из способов: экспериментальным, аналитическим, комбинированным или экспериментально аналитическим.
При экспериментальном способе уравнения моделей получают путем постановки специальных экспериментов (метод активного эксперимента) или путем статистической обработки результатов длительной регистрации переменных объекта в условиях его нормальной эксплуатации (метод пассивного эксперимента).
При аналитическом описании уравнения моделей получают на основании физико-химических закономерностей протекающих процессов.
При экспериментально-аналитическом подходе уравнения моделей получают аналитическим путем с последующим уточнением параметров этих уравнений экспериментальными методами.
При разработке математического описания автоматических систем следует учитывать основные методологические положения теории автоматического управления. Это прежде всего системный подход к решению задач управления, рассматривающий поведение объекта и регулятора в процессе регулирования в неразрывной взаимосвязи; возможность применения методов теории автоматического управления к системам самой разнообразной физической природы вследствие абстрагирования математических моделей от конкретных физических систем. Кроме того, система рассматривается как цепь взаимодействующих физически и информационно элементов и обладает способностью передавать физические воздействия и информационные сигналы в одном, строго определенном направлении; каждый же элемент системы рассматривается как преобразователь входного воздействия в выходную реакцию. Математическое описание как отдельных элементов, так и системы в целом составляется, как правило, с рядом допущений и упрощений, удачность которых зависит от глубины
знаний исследователя системы в данной области, его интуиции и обязательно подлежит экспериментальной проверке.
В общем случае уравнения математической модели объекта или системы управления, устанавливающие взаимосвязь между входными и выходными переменными, называются уравнениями движения.
Уравнения, описывающие поведение системы регулирования в установившемся режиме при постоянных воздействиях, называются уравнениями статики.
Уравнения, описывающие поведение системы регулирования при неустановившемся режиме при произвольных входных воздействиях, называются уравнениями динамики.
Все объекты регулирования можно разделить на два класса: объекты с сосредоточенными координатами, динамика которых описывается обыкновенными дифференциальными уравнениями, и объекты с распределенными координатами, динамика которых описывается дифференциальными уравнениями в частных производных. В дальнейшем рассматриваются только объекты с сосредоточенными координатами.
В качестве примера можно рассмотреть объект с сосредоточенными координатами, описываемый дифференциальным уравнением второго порядка (рис. 1.2)
F(y, y′, y′′, x, x′) + f = 0, (3.1)
где y – выходная переменная; x, f – входные переменные; y′, x′ – первые производные по времени; y′′ – вторая производная по времени.
При постоянных входных воздействиях x = x0; f = f0 с течением времени выходная величина принимает постоянное значение y = y0 и уравнение (3.1) преобразуется к виду:
F(y0, 0, 0, x0, 0) + f0 = 0. (3.2)
Конечное уравнение (3.2) является уравнением статики.
Статический режим можно характеризовать с помощью статических характеристик.
Статической характеристикой объекта (системы) называется зависимость выходной величины от входной в статическом режиме.
Статическую характеристику можно построить экспериментально, если подавать на вход объекта постоянные воздействия и замерять выходную переменную после окончания переходного процесса. Если объект имеет несколько входов, то он характеризуется семейством статических характеристик. В свою очередь, сама статическая характеристика характеризуется коэффициентом k, который определяется как dx
k = dy. Для объектов с нелинейной статической характеристикой коэффициент усиления является переменной величиной, для объектов же с линейными статическими характеристиками коэффициент усиления – величина постоянная (рис. 3.1).
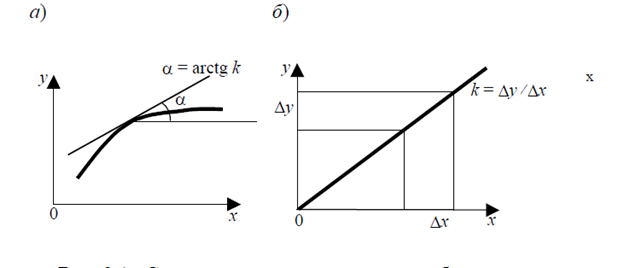
Рис. 3.1 Статическая характеристика объектов:
а – нелинейного; б – линейного
3.2 Примеры уравнений объектов управления
В теории автоматического управления широко используется метод математических аналогий, согласно которому различные по физической природе объекты описываются однотипными математическими зависимостями.
Рассмотрим некоторые примеры составления уравнений статики и динамики для различных по физической природе объектов.
7.2 Определение линейной стационарной системы.
В теории управления к линейным системам обычно относят те системы, в которых протекающие процессы являются стационарными и описываются линейными дифференциальными уравнениями с постоянными или функционально зависящими от времени коэффициентами. Важным свойством таких систем является их соответствие принципу суперпозиции. В связи с этим определение линейной системы, как правило, дается в следующем варианте: линейными называются системы, подчиняющиеся принципу суперпозиции, который заключается в том, что реакция объекта на сумму входных сигналов Σxi (t) равна сумме реакций на каждый сигнал в отдельности для любых xi(t).
7.3 Динамические процессы в системах
Под системой в дальнейшем будет пониматься любое множество элементов (может быть отдельный элемент), образующее некоторое целостное единство безотносительно к функциям, которые они выполняют, т.е. это может быть объект, регулятор, система регулирования и т.д.
Система называется динамической, если она описывается дифференциальными, интегральными либо конечными уравнениями, зависящими от времени, и называется статической, если в ее описании отсутствует параметр времени.
Основной задачей изучения динамического поведения линейной системы является получение возможности рассчитывать выходной сигнал y(t) для любого известного входного сигнала x(t). В связи с этим необходимо располагать математическим аппаратом для исследования
линейной системы. Основными динамическими характеристиками, используемыми в теории автоматического управления, являются передаточная функция, дифференциальное уравнение, временные характеристики: переходная функция, весовая функция; частотные характеристики: амплитудно-фазовая характеристика

