




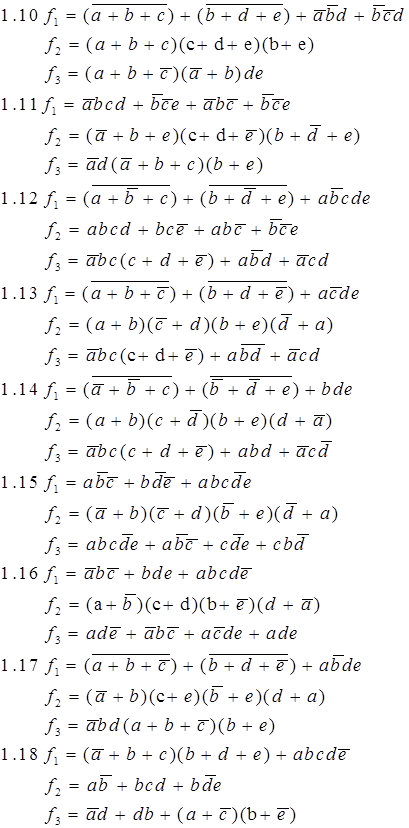
1. Умови роботи схем задано наступними логічними функціями. Скласти схему на логічних елементах та перевірити її працездатність.


2. Виконати логічний синтез багатотактної схеми та перевірити її працездатність (в задачах з двигунами в якості вихідних змінних використовувати мікродвигуни М1 та М2).
2.1 Штаба під час руху перекриває фотодатчики a і b (рис. 4.4, а), при цьому сигнали датчиків набувають значення одиниця (a =1, b =1). Схема повинна виробляти сигнали, що визначають напрям руху штаби (ліворуч або праворуч). Якщо жоден з датчиків не перекритий, то вихідні сигнали схеми дорівнюють нулю.

Рисунок 4.4
2.2 Розташовані перед реверсивним транспортером датчика a і b (рис. 6.1, б) призначені для керування системою сигналізації про напрям руху виробу, що проходить повз них. Сигнал f 1 на виході системи дорівнює одиниці, якщо останній вибір рухався ліворуч, а сигнал f 2 =1, якщо праворуч. У вихідному стані схеми обидва вихідні сигнали дорівнюють нулю.
2.3 Схема керування двигунами М1, М2 працює таким чином. При натисненні першої кнопки вмикається двигун М1, при натисненні другої – вмикається двигун М2 і вимикається двигун М1, при натисненні третьої –вимикається М2. Кнопки з самоповерненням і натискаються по черзі. Схема не повинна реагувати на порушення черговості натискання кнопок.
2.4 Схема виробляє сигнали f 1 і f 2, які керують насосами М1 і М2. Насоси відкачують рідину з накопичуючого басейну. У басейні розміщено три датчики рівня: d 1- нижній; d 2 – середній; d 3 – верхній. При досягненні рідиною відповідного рівня вихідний сигнал датчика набуває значення одиниця. У вихідному стані рівень рідини нижчий за рівень, що фіксується датчиком d 1. При підніманні рідини до середнього рівня (d 2 =1) вмикається насос М1. Якщо після цього рівень рідини опускається нижче рівня датчика d 1, то насос М1 вимикається, якщо ж рівень рідини продовжує підвищуватися і спрацьовує датчик d 3, то крім насоса М1 вмикається насос М2. Якщо після цього рівень рідини знизиться нижче середнього рівня (d 2 =0), то вимикається насос М2, а насос М1 продовжує працювати. При подальшому зниженні рівня (d 1=0) насос М1 вимикається.
2.5 Схема керування двигуном М1 забезпечує дистанційний та місцевий режими роботи. Для вмикання двигуна в дистанційному режимі повинен бути поданим сигнал а (дозвіл дистанційного керування) і натиснута кнопка “Пуск” (сигнал b). У режимі місцевого керування повинен бути поданим сигнал с (дозвіл місцевого керування) і натиснута кнопка d (пуск з місця). Робота схеми у будь-якому режимі неможлива при наявності сигналу е (заборона роботи). В режимі місцевого керування зупинка здійснюється кнопкою “Стоп1” (сигнал m), при дистанційному керуванні – кнопкою “Стоп 2” (сигнал n).
2.6 Автомат керується кнопками а і b і має чотири вихідних сигнали Х 1, Х 2, Х 3, Х 4. Схема працює так. Спочатку натискають одну з кнопок, а потім, не відпускаючи її – другу. Коли одну з кнопок буде відпущено, сигнал на одному з виходів залежно від черговості натиснення та відпускання кнопок згідно з таблицею 3, повинен набувати значення одиниця. Після відпускання другої кнопки схема набуває вихідний стан (усі вихідні сигнали дорівнюють нулеві).
Таблиця 4.2
| Першою натиснута кнопка | Першою відпущена кнопка | Сигнал 1 на виході |
| а | а | Х 1 |
| а | b | Х 2 |
| b | b | Х 3 |
| b | а | Х 4 |
2.7 Схема забезпечує керування чотирма лампами за допомогою однієї кнопки. У вихідному стані світяться перша і друга лампи. Якщо натиснути кнопку перший раз, то будуть світитися друга і третя лампи, а перша погасне. Після відпускання кнопки стан схеми не змінюється. Якщо натиснути кнопку другий раз, то будуть світитися третя і четверта лампи, а друга погасне. Якщо натиснути кнопку третій раз, то будуть світитися четверта і перша лампи, а третя погасне. Якщо натиснути кнопку четвертий раз, то схема набуває вихідний стан. Після цього цикл роботи схеми повторюється.
2.8 Схема забезпечує місцевий та дистанційний пуск вперед і назад та зупинку двигуном. При місцевому керуванні необхідно подати сигнал d =1 – дозвіл місцевого керування. Керування електроприводом в цьому режимі здійснюється кнопками “Вперед 1”, “Назад 1”, “Стоп 1”. Для керування електроприводом в дистанційному режимі необхідно подати сигнал е =1 (дозвіл дистанційного керування). Пуск і зупинка електропривода здійснюється кнопками “Вперед 2”, “Назад 2”, “Стоп 2”. При розробці схеми передбачити індикацію стану електропривода при дистанційному керуванні, а також блокування, яке унеможливлює одночасно вмикання контакторів “Вперед” і “Назад”.
2.9 Схема забезпечує автоматичне і ручне керування двигуном М1. Вибір режиму здійснюється перемикачем, який має три положення: ручне, нейтральне, автоматичне. При ручному керуванні пуск і зупинка двигуна здійснюється кнопками “Пуск” і “Стоп”, в автоматичному режимі – відповідними командами від пристрою автоматичного керування. При розробці схеми передбачити необхідність повернення перемикача режимів в нейтральне положення для повторного вмикання двигуна після раптового зникнення і наступного поновлення напруги живлення.
2.10 Умови роботи схеми збігаються із завданням 2.9. Різниця полягає у тому, що привод реверсивний і при ручному керуванні команди подаються кнопками “Вперед”, “Назад”, “Стоп”, а при автоматичному – відповідними сигналами від пристрою автоматичного керування.
2.11 Схема має три вхідні сигнали а,b,с і один вихідний Х. Сигнал Х =1, якщо усі три вхідні сигнали дорівнюють одиниці, причому сигнал а набув значення 1 першим. Після того, як сигнал Х набув значення 1, воно зберігається доти, поки а =1, незалежно від значень сигналів b і с.
2.12 Схема має три вхідні сигнали а,b,с і один вихідний Х. Сигнал Х =1, якщо усі три вхідні сигнали мають значення 1, причому сигнал а набуває значення 1 останнім. Після того, як сигнал Х набув значення 1, воно зберігається доти, поки а =1, незалежно від значень сигналів b і с.
2.13 Схема має три вхідні сигнали а,b,с і один вихідний Х. Сигнал Х =1, якщо усі три вхідні сигнали мають значення 1, причому сигнал а набуває значення 1 другим. Після того, як сигнал Х набув значення 1, воно зберігається доти, поки а =1, незалежно від значень сигналів b і с.
2.14 Виконати синтез схеми, що має два вхідні сигнали a і b і два вихідні f 1 i f 2. Стан входів розглядається як двійкове число. Якщо при зміні входів це число збільшується, то f 1=1, f 2=0, якщо зменшується, то f 1=0, f 2=1.
2.15 Схема має два вхідні сигнали а і b та один вихідний X. Cигнал X= 1 тільки в тому разі, коли а спочатку набуває значення 1, а потім змінюється з одиниці на нуль. Після цього значення X= 1 зберігається доти, поки сигнал b спочатку набуде значення одиниця, а потім зміниться з одиниці на нуль.
2.16 Схема порівнює за величиною два двійкові дворозрядні числа  і
і  . Вихідні сигнали схеми X, Y, Z. Якщо
. Вихідні сигнали схеми X, Y, Z. Якщо  , то X= 1, Y= 0, Z= 0; якщо
, то X= 1, Y= 0, Z= 0; якщо  то X= 0, Y= 1, Z= 0; якщо A=B, то X= 0, Y= 0, Z= 1.
то X= 0, Y= 1, Z= 0; якщо A=B, то X= 0, Y= 0, Z= 1.
2.17 Схема має три вхідні сигнали а,b,с і один вихідний Х. Сигнал Х =1, якщо усі три вхідні сигнали мають значення 1, причому сигнал а набуває значення 1 першим, сигнал b – другим, а сигнал c – останім. Після того, як сигнал Х набув значення 1, воно зберігається доти, поки сигнали не будуть набирати значення 0 з такою ж самою черговістю.
2.18 Схема має три вхідні сигнали а,b,с і один вихідний Х. Сигнал Х =1, якщо усі три вхідні сигнали мають значення 1, причому сигнал а набуває значення 1 останнім. Після того, як сигнал Х набув значення 1, воно зберігається доти, поки а =1, незалежно від значень сигналів b і с.
2.19 Схема забезпечує керування двома двигунами М1 та М2. При натисненні кнопки «Старт» обидва двигуни починають обертатися. Взалежності від того який кінцевий вимикач SQ1 чи SQ2 спрацює перший, двигун М1 чи М2 зупиниться, а інший продовжить обертатися. Після натиснення SQ3 інший двигун також вимикається.
2.20 Схема забезпечує керування двома двигунами М1 та М2. При натисканні кнопки «Старт» двигун М1 починає обертатися. При спрацюванні кінцевого датчика SQ1, М1 зупиняється, а М2 обертається доки не надійде сигнал SQ3, після чого знову вмикається М1, а М2 продовжує свою роботу. При спрацюванні датчика SQ2 двигуни М1 та М2 зупиняються.
2.21 Схема забезпечує роботу в ручному та автоматичному режимі. При обранні автоматичного режиму двигун виконує наступну послідовність дій: обертається до надходження сигналу SQ1, стоїть до надходження сигналу SQ2, обертається в протилежну сторону до надходження сигналу SQ3. При обранні ручного режиму, двигун керується кнопкою «Старт». Якщо «Старт» натиснута, то двигун обертається, якщо ні, то двигун стоїть.
2.22 Виконати синтез схеми, що має чотири вхідних сигналів а1…..а4 і чотири вихідних b1….b4. Система відпрацьовує наступну послідовність вхідних та вихідних сигналів:

2.23 Схема забезпечує керування чотирма лампами за допомогою однієї кнопки. У вихідному стані світяться третя і четверта лампи. Якщо натиснути кнопку перший раз, то будуть світитися друга і третя лампи, а четверта погасне. Після відпускання кнопки стан схеми не змінюється. Якщо натиснути кнопку другий раз, то будуть світитися перша і друга лампи, а третя погасне. Якщо натиснути кнопку третій раз, то будуть світитися всі чотири лампи. Якщо натиснути кнопку четвертий раз, то схема набуває вихідний стан. Після цього цикл роботи схеми повторюється.
2.24 Схема забезпечує керування чотирма лампами за допомогою двох кнопок. При натисненні першої кнопки вмикається перша лампа, при натисненні другої, не відпускаючи першої, вмикається друга лампа. При відпусканні другої кнопки перша лампа вимикається, а при відпусканні першої – вимикається друга.
3. Виконати синтез схеми за умовами роботи, заданими у вигляді циклограм, та перевірити її працездатність.

Рисунок 4.5 Циклограми


Рисунок 4.5 Циклограми (продовження)

Рисунок 4.5 Циклограми (продовження)
4. Виконати синтез генератора десяткових чисел на основі JK-тригерів та перевірити її роботу.
Прямокутні сигнали на вхід схеми краще подавати двома кнопками, використавши на вході RS-тригер, схему якого було розглянуто вище.
Цей прийом також можна використати в завданні 2, де схема реагує як на передній так і на задній фронт імпульсу керуючого сигналу. Оскільки швидкодія мікросхеми досить велика, то на роботу схеми можуть впливати навіть такі швидкі зміни сигналу на вході які виникають через брязкіт контактів при замиканні контакту кнопки.
Задані послідовності двійкових чисел:
4.1 0,1,2,3,4,4,3,2,1,0,1,2…
4.2 0,1,2,3,5,5,3,2,1,0,1,2…
4.3 0,4,2,3,6,6,3,2,4,0,4,2…
4.4 0,1,2,3,7,7,3,2,1,0,1,2…
4.5 0,1,2,4,5,5,4,2,1,0,1,2…
4.6 0,2,4,5,7,7,5,4,2,0,2,4…
4.7 0,1,2,4,7,7,4,2,1,0,1,2…
4.8 0,1,2,5,6,6,5,2,1,0,1,2…
4.9 0,3,2,5,7,7,5,2,3,0,1,2…
4.10 0,1,2,6,7,7,6,2,1,0,1,2…
4.11 0,1,3,4,5,5,4,3,1,0,1,3…
4.12 0,2,3,5,6,6,5,3,2,0,2,3…
4.13 0,1,3,4,6,6,4,3,1,0,1,3…
4.14 0,1,4,5,7,7,5,4,1,0,1,4…
4.15 0,1,4,6,7,7,6,4,1,0,1,4…
4.16 0,3,5,6,7,7,6,5,3,0,3,5…
4.17 0,1,3,4,6,6,4,3,1,0,1,3…
4.18 0,7,2,5,3,3,5,2,7,0,7,2…
4.19 0,7,2,6,3,3,6,2,7,0,7,2…
4.20 0,5,3,4,6,6,4,3,5,0,5,3…
4.21 0,7,3,5,6,6,5,3,7,0,7,3…
4.22 0,2,3,4,6,6,4,3,2,0,2,3…
4.23 0,4,1,5,7,7,5,1,4,0,4,1…
4.15 0,3,1,2,7,7,2,1,3,0,3,1…

