




У основі побудови систем автоматичного керування лежать загальні фундаментальні правила, що визначають вид алгоритму функціонування, взаємодії регулятора з об'єктом, принцип регулювання, характер регулювання в часі і функції ЕОМ у людині – машинних системах.
Під алгоритмом функціонування розуміється сукупність правил, розпоряджень або математичних залежностей, що визначають послідовність зміни вихідного розміру, що забезпечує правильність протікання ТП.
Класифікація АСУ, в основу якої покладені вище розглянуті ознаки, подана нижче
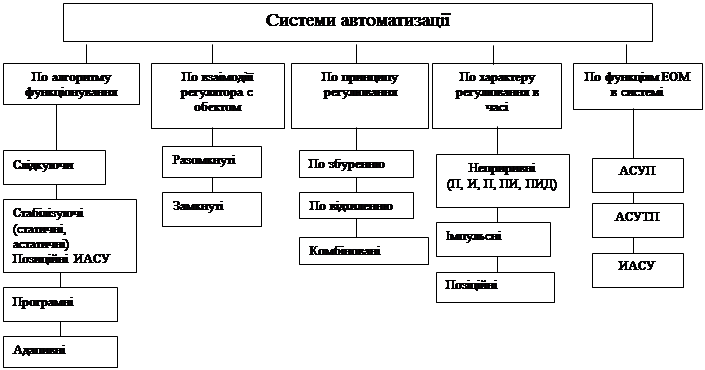
Класифікація систем автоматизації
В програмному керуванні вихідна величина об'єкта змінюється по заздалегідь заданому алгоритмі (програмі). Розрізняють системи з тимчасовим і просторовим програмним керуванням. Прикладом першої є штучний світанок у пташниках. Системи другого виду використовують в основному у верстатах, при намотці резисторів складної форми і т.д.
У системі, що стабілізує, значення вихідних величин стабілізується.
Розрізняють статичні й астатичні системи регулювання. У статичному режимі стабілізоване значення вихідної величини залежить від значення вхідної, що подано графіком.
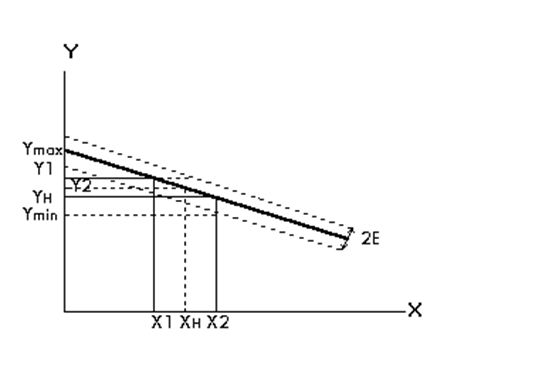
Для кількісної оцінки служить коефіцієнт нерівномірності.
s=Ymax – Ymin / Yн
і коефіцієнт статизму 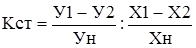 .
.
Коефіцієнт Sвраховує не чутливість системи.
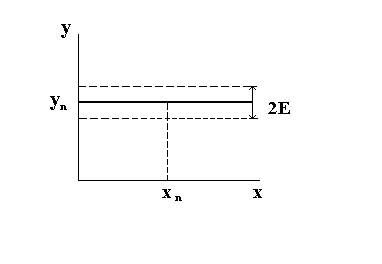 |
При s=0 і Кст=0 у всьому діапазоні керування, то система буде астатичною і її статична характеристика буде такою:
Система, що стежить – містить заздалегідь невідомий АФ, що представляє зміну вихідної величини, повторюючи зміну вхідної. Наприклад спец. пристрої спостереження за рядками рослин, за піною при посіві і т.д. Останнім часом почали впровадяться системи пошуку экстремума при дрейфі параметрів, при чому визначення напрямку впливу заснований на обчисленні знака похідної dy/dv. У точці экстремума швидкість зміни вихідної величини дорівнює нулю, тобто Y=Yот.
Адаптивні системи. У реальних умовах за рахунок різноманітних обурень змінюються не тільки координати, але і параметри системи, що знижує якість роботи, а часто і дає відмови. Це можна виправити лише шляхом оперативної зміни параметрів або структури системи, із метою наближення математичного опису зміненої системи до її вихідної моделі. Такі системи звуться адаптивних (від лат. adaptio – пристосування). Адаптивні системи зі зміною значень параметрів – самонастроювальні, а зі зміною структури – самоорганізуються.
Принцип керування по обуренню був запропонований французьким інженером Понселе і впроваджений російським інженером Чиколевым в установці автоматичного регулювання горіння дугових ламп. Цей принцип зветься Понселе – Чиколева.
Принцип керування по відхиленню вперше застосував російський технік Ползунов (1765 р.) і у відцентровому регуляторі частоти обертання вала парової машини англійський механік Уатт (1784).
Тому цей принцип називається Ползунова – Уатта.
Безупинне керування здійснюється по одному з відомих законів.
Законом керування називають математичну модель, відповідно до якого керуючий вплив на об'єкт вироблявся б безінерційним керуючим пристроєм.
Пропорційний (П-закон):
 ,
,
де Е – відхилення вихідних величин;
Кр – коефіцієнт передачі.
Інтегральний закон (И-закон)

 ;
;
ПИ – закон:
 ;
;
ПИД – закон:

АСУТП – це людино-машинна система, що забезпечує збір і обробку інформації, необхідної для оптимізації керування різноманітних сфер виробництва.
АСУТП – управляє ТП, визначення її буде розглянуто нижче.
ІАСУ – інтегрована система що охоплює як управлінські питання виробництва, так і керування ТП.
2.1. Визначення АСУТП, термінологія, основні поняття.
Автоматизована система керування технологічним процесом (АСУТП) відповідно ГОСТ 17194-76 – це людино-машинна система керування, що забезпечує автоматизований збір і обробку інформації, необхідної для оптимізації керування технологічним об'єктом відповідно до прийнятого критерію.
АСУТП призначена для виробітки і реалізації керуючих впливів на технологічний об'єкт керування (ТОУ).
У якості ТОУ можуть бути:
1) Технологічні агрегати;
2) Патокові технологічні лінії (ПТЛ);
3) Окремі виробництва (ділянки, цехи);
4) Виробничий процес усього підприємства(заводу, ферми і т.д.), якщо керування цим виробництвом носить в основному технологічний характер.
Спільно функціонуючі ТОУ і керуюча їм АСУТП утворять автоматизований технологічний комплекс (АТК).
Критерій керування АСУТП – це співвідношення, що характеризує якість функціонування ТОУ і конкретні числові значення, що приймають, у залежності від використовуваних керуючих впливів. У якості критерію керування виступають звичайно техніко-економічні показники (наприклад, собівартість вихідного продукту при заданій його якості;
Продуктивність ТОУ при необхідній якості вихідного продукту). Це можуть бути також чисто технічні показники (наприклад параметри процесу, характеристики вихідного продукту і т.д.)
Отже система керування ТОУ є АСУТП у тому випадку, якщо вона здійснює керування ТОУ в реальному масштабі часу протікання процесу і якщо виробітка і реалізація рішень здійснюється за допомогою ЕОМ.
При створенні АСУТП повинні бути визначені конкретні цілі функціонування і її призначення підприємством.
Такими цілями, наприклад, можуть бути:
- економія палива, сировини, матеріалів і інших виробничих ресурсів;
- забезпечення безпеки функціонування об'єкта;
- підвищення якості вихідного продукту;
- зниження витрат живої праці;
- досягнення оптимального завантаження (використання) устаткування;
- оптимізація маршрутів обробки в дискретних виробництвах і т.д.
Важливим параметром є визначення функцій АСУТП, під яким розуміють сукупність дій системи, спрямованих на досягнення цілей керування.
Слід зазначити функції АСУТП у цілому від функцій, виконуваних усім комплексом технічних засобів системи або його окремих пристроїв.
Функції АСУТП підрозділяють на керуючі, інформаційні і допоміжні.
Керуюча функція АСУТП – це функція, результатом якої є виробітку і реалізація керуючих впливів на ТОУ.
Інформаційна функція – це функція, змістом якої є збір, обробка й уявлення інформації про стан АТК оперативному персоналу або передача цієї інформації для наступної обробки.
Відмінна риса керуючих і інформаційних функцій АСУТП їхня спрямованість на конкретного споживача (ОУ, оперативний персонал, суміжні системи і т.д.).
Допоміжні функції АСУТП – це функції, що забезпечують рішення усередині системних задач, що не мають споживача поза системою (контроль за функціонуванням технічних засобів системи, збереженням інформації і т.д.)

