




Пример 5.1. Синтезировать регулятор положения с применением ЛЧХ на основе критерия динамической точности системы. Для расчётов принять следующие параметры:
- максимальная угловая скорость нагрузки  = 65 град/с;
= 65 град/с;
- максимальное угловое ускорение нагрузки  = 19 град/с2;
= 19 град/с2;
- ошибка по скорости DaW = 25 мин;
- ошибка по ускорению Dae = 50 мин;
- передаточное число редуктора  ;
;
- показатель колебательности М = 1,1;
- коэффициент передачи вращающегося трансформатора
 В/рад.
В/рад.
Моментную составляющую ошибки определить при отработке квадратично возрастающего момента сопротивления 
 .
.
Параметры контура скорости принять из примера 3.2.
Решение. 1. Определяем параметры желаемой передаточной функции ЭП (5.6). Коэффициент передачи по ускорению будет равен
 с– 2.
с– 2.
Значение базовой частоты определится по формуле (5.4)
 с– 1.
с– 1.
По выражениям (5.7) рассчитываем постоянные времени
 с;
с;
 с.
с.
С учётом проведённых расчётов запишем желаемую передаточную функцию ЭП с астатизмом второго порядка
 . (5.13)
. (5.13)
Передаточная функция неизменяемой части
 .
.
Данные для определения передаточной функции  примем по примеру 3.2 и составим программу:
примем по примеру 3.2 и составим программу:
num1=[0.0017577 0.12555 1.55];
den1=[0.0001134 0.063 0];
sys1=tf(num1, den1);
num2=[11];
den2=[0.004 1];
sys2=tf(num2, den2);
num3=[0.818];
den3=[0.001134 0.081 1];
sys3=tf(num3, den3);
sys4=sys1*sys2*sys3;
num5=[0.127];
den5=[0.012 1];
sys5=tf(num5, den5);
sys6=feedback(sys4,sys5);
num7=[28.5];
den7=[69 0];
sys7=tf(num7, den7);
sys8=sys6*sys7
sys8 =
0.005409 s^3 + 0.8371 s^2 + 36.97 s + 397.5
---------------------------------------------------------------------------------------------
4.259e-10 s^7 + 4.09e-07 s^6 + 0.0001152 s^5 + 0.01153 s^4 + 0.5681 s^3 + 14.25 s^2 + 122.2 s
В приведенной программе оператор feedback осуществляет операцию замыкания отрицательной обратной связи контура скорости согласно уравнения
 .
.
Для определения передаточной функции регулятора положения составляем следующую программу:
num1=[32.244*0.584 32.244];
den1=[0.0278 1 0 0];
sys1=tf(num1, den1);
num2=[0.005409 0.8371 36.97 397.5];
den2=[4.259e-10 4.09e-07 0.0001152 0.01153 0.5681 14.25 122.2 0];
sys2=tf(num2, den2);
sys3=sys1/sys2
sys3 =
8.02e-09 s^8 + 7.715e-06 s^7 + 0.002182 s^6 + 0.2208 s^5 + 11.07 s^4 + 286.7 s^3 + 2761 s^2 + 3940 s
-------------------------------------------------------------------------------------------------- 0.0001504 s^6 + 0.02868 s^5 + 1.865 s^4 + 48.02 s^3 + 397.5 s^2
Составляем программу для определения ЛАЧХ регулятора положения, изображенную на рис. 5.2:
num=[8.02e-09 7.715e-06 0.002182 0.2208 11.07 286.7 2761 3940 0];
den=[0.0001504 0.02868 1.865 48.02 397.5 0 0];
bode(num, den)
Рис. 5.2. ЛАЧХ регулятора положения
Переходим к анализу полученного графика. Низкочастотный участок ЛАЧХ регулятора положения проходит под наклоном –20 дБ/дек, постепенно изменяя наклон к среднечастотному участку до 0 дБ/дек. Высокочастотный участок полученной ЛАЧХ (w ³ 100 с– 1) аппроксимируем двумя асимптотами с наклоном 20 дБ/дек и 0 дБ/дек.
Таким образом, проведённый анализ показывает, что ЛАЧХ следует аппроксимировать четырьмя асимптотами (рис. 5.2) и придать регулятору положения свойства ПИД-регулятора.
Рассчитаем параметры передаточной функции регулятора положения. На частоте w = 1 находим
 дБ, (5.15)
дБ, (5.15)
откуда  = 11,481 с– 1.
= 11,481 с– 1.
По графику, представленному на рис. 5.2, определяем частоты сопряжения w1 = 2,56 с– 1; w2 = 100 с– 1; w3 = 1000 с– 1 и рассчитываем постоянные времени
 с;
с;  с;
с;  с.
с.
Подставляя значение Т 1 в (5.15), получаем коэффициент передачи регулятора положения
 .
.
С учётом полученных значений передаточная функция синтезированного регулятора положения принимает вид
 .
.
Для построения динамической модели ЭП представим передаточную функцию РП (ПИД-регулятора) в виде произведения
 .
.
Данная модель ПИД-регулятора чётко показывает все три составляющие алгоритма его работы: пропорциональную К рп, интегральную  и дифференциальную составляющую, представленную в виде форсирующего звена первого порядка (
и дифференциальную составляющую, представленную в виде форсирующего звена первого порядка ( ). Заметим, что первая составляющая обеспечивает передачу сигнала, пропорциональную коэффициенту К рп. Интегральная составляющая обеспечивает точность работы системы за счёт сведения к нулю установившейся ошибки при отработке линейно возрастающего сигнала αз = Ωmax t. Дифференциальная составляющая обеспечивает увеличение запасов устойчивости по фазе и амплитуде и требуемую колебательность процесса.
). Заметим, что первая составляющая обеспечивает передачу сигнала, пропорциональную коэффициенту К рп. Интегральная составляющая обеспечивает точность работы системы за счёт сведения к нулю установившейся ошибки при отработке линейно возрастающего сигнала αз = Ωmax t. Дифференциальная составляющая обеспечивает увеличение запасов устойчивости по фазе и амплитуде и требуемую колебательность процесса.
С учётом рассчитанных параметров получаем ССДМ ЭП (рис. 5.5) с аналоговыми контуром положения и контуром скорости, который был синтезирован в примере 3.2. Особенностью схемы, показанной на рис. 5.5, является наличие блоков Ramp, Ramp1, Ramp2, Ramp3, служащих для формирования квадратично возрастающих воздействий  и
и  на выходах умножителей Product, Product1.
на выходах умножителей Product, Product1.
Блок Ramp (рис. 5.3), реализующий линейно возрастающий сигнал, находится в библиотеке блоков Sources.

Рис. 5.3. Блок Ramp
В диалоговые окна блоков Ramp и Ramp1 (рис. 5.4) вводятся значения 1 и  .
.

Рис. 5.4. Диалоговое окно блока Ramp
Аналогично, в диалоговые окна блоков Ramp2 и Ramp3 вводятся значения 1 и  соответственно.
соответственно.
| Рис. 5.5. Структурная схема динамической модели электропривода в среде MatLab |

Результаты моделирования показаны на рис. 5.6-5.8.
α(t), рад
 t, c
t, c
Рис. 5.6. Переходная характеристика системы по задающему воздействию
 , рад
, рад
 t, c
t, c
Рис. 5.7. График ошибки системы при квадратично возрастающем
задающем воздействии
 , рад
, рад
 t, c
t, c
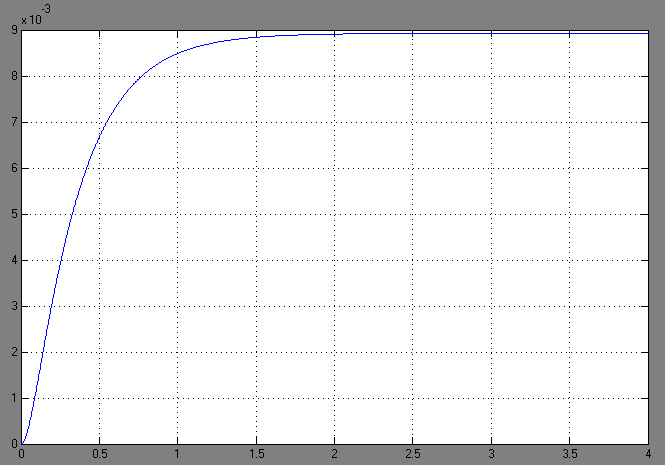
Рис. 5.8. График моментной составляющей ошибки системы
при квадратично возрастающем моменте сопротивления
Анализ графика (рис. 5.6) показывает, что следящий позиционный ЭП отрабатывает ступенчатое воздействие  примерно за 2,0 с с перерегулированием
примерно за 2,0 с с перерегулированием  и числом колебаний N < 1, что соответствует заданному показателю колебательности М = 1,1.
и числом колебаний N < 1, что соответствует заданному показателю колебательности М = 1,1.
Поскольку контур положения содержит ПИД-регулятор положения, очевидно, что при ступенчатом и линейно возрастающем задающем воздействии статическая ошибка и ошибка по скорости будут равны нулю. На рис. 5.7 представлена характеристика при отработке типового задающего воздействия  /2. Установившаяся ошибка системы
/2. Установившаяся ошибка системы  составляет около 30 мин. Моментная составляющая ошибки при отработке квадратично возрастающего момента сопротивления
составляет около 30 мин. Моментная составляющая ошибки при отработке квадратично возрастающего момента сопротивления  составляет 6,84 мин по истечении 2,5 с (рис. 5.8).
составляет 6,84 мин по истечении 2,5 с (рис. 5.8).

