




Схема силовой части тиристорного преобразователя представлена на рис. 1.4 и содержит силовой трансформатор ТМ1, трёхфазный выпрямитель, выполненный по симметричной мостовой схеме, уравнительные L1 – L4 и сглаживающий дроссель L5. Каждый мост состоит из шести тиристоров (VS1 – VS6). Реверс выходного напряжения осуществляется переключением силовых мостов.
Магнитопроводы уравнительных дросселей рассчитываются на уравнительные токи. Если ток нагрузки насыщает сердечники дросселей, то их индуктивность резко падает и необходимо включать четыре дросселя. При протекании тока нагрузки по преобразователю I уравнительные дроссели L 1 и L 2 насыщаются, а L 3 и L 4 остаются ненасыщенными и ограничивают токи между соответствующими трёхфазными коммутирующими группами тиристоров. Если уравнительные дроссели не насыщаются током нагрузки, достаточно применения двух дросселей, например, L 1 и L 3. В этом случае дроссели служат и для сглаживания пульсаций тока нагрузки. Индуктивность уравнительных дросселей обычно достаточна для этой цели, поэтому необходимость в специальном сглаживающем дросселе L 5 отпадает.
Для управления тиристорами используется система импульсно-фазного управления (СИФУ), выполняющая следующие функции [1, 4, 12]:
- определение моментов времени открывания тиристоров, в соответствии с сигналами, поступающими с выходов суммирующих усилителей, формирующих сигнал рассогласования;
- формирование открывающих импульсов, передаваемых в нужные моменты времени на управляющие электроды тиристоров.
По способу получения сдвига открывающих импульсов относительно точки естественного отпирания тиристоров различают горизонтальный, вертикальный и интегрирующий принципы управления. Преимущественно применяется вертикальный принцип управления, суть которого заключается в следующем: момент подачи открывающих импульсов UVS определяется при равенстве поступающего управляющего напряжения U у с пилообразным опорным напряжением U пил. Отсчеты угла открывания γ для каждого тиристора производятся в собственном канале многоканальной СИФУ.
Уравнение электрического равновесия якорной цепи в соответствии с выражением (1.1)
 (1.16)
(1.16)
Среднее значение выпрямленного напряжения  определяется по формуле
определяется по формуле

где U 2 – действующее значение фазного напряжения вторичной обмотки трансформатора (или напряжение сети в бестрансформаторных схемах); р – число пульсаций выпрямленного напряжения; U тп0 – максимальное значение среднего выпрямленного напряжения при γ = 0.
Рис. 1.4. Схема силовой части тиристорного преобразователя
При раздельном управлении комплектами вентилей, а также в области малых нагрузок и при больших значениях угла отпирания тиристоров системе ТП-ДПТ возникает режим прерывистых токов, причем зона прерывистых токов тем больше, чем больше угол γ. Появление зоны прерывистых токов обусловлено тем, что в определенные промежутки времени мгновенное значение выпрямленного напряжения преобразователя U тп становится меньше встречно действующей ЭДС двигателя Е, и как следует из уравнения (1.16) разность  становится отрицательной. Ток должен изменить направление на противоположное. Но поскольку вентили обладают односторонней проводимостью, ток становится равным нулю. Вентили закрываются, и ток появляется вновь при условии U тп > Е.
становится отрицательной. Ток должен изменить направление на противоположное. Но поскольку вентили обладают односторонней проводимостью, ток становится равным нулю. Вентили закрываются, и ток появляется вновь при условии U тп > Е.
При больших нагрузках ток является непрерывным. Объясняется это тем, что запас электромагнитной энергии в цепи выпрямленного тока значительный. Возникающая при исчезновении тока ЭДС самоиндукции  складывается с мгновенным выпрямленным напряжением U тп и в сумме они превышают ЭДС двигателя Е. При малых нагрузках ЭДС самоиндукции оказывается недостаточной для поддержания тока.
складывается с мгновенным выпрямленным напряжением U тп и в сумме они превышают ЭДС двигателя Е. При малых нагрузках ЭДС самоиндукции оказывается недостаточной для поддержания тока.
Для того чтобы исключить режим прерывистых токов применяются дополнительные дроссели с индуктивностью  .
.
Для выбранной трёхфазной мостовой симметричной схемы (см. рис. 1.4) принимаем: количество пульсаций р = 6; угол отпирания тиристоров  ; индуктивное сопротивление фазы
; индуктивное сопротивление фазы  .
.
Ограничение зоны прерывистых токов. Требование ограничения зоны прерывистых токов вызвано тем, что при протекании прерывистых токов существенно изменяются статические и динамические характеристики системы управления электропривода с тиристорным преобразователем. Прерывистый ток возникает в том случае, когда ток нагрузки и индуктивность цепи выпрямленного тока малы по величине.
Для получения гранично-непрерывного режима при заданном значении угла регулирования γ в цепь выпрямленного тока необходимо включить дроссель с индуктивностью  значение которой можно определить из формулы для трехфазной мостовой симметричной схемы:
значение которой можно определить из формулы для трехфазной мостовой симметричной схемы:
 , (1.17)
, (1.17)
где  ; U 2л – действующее значение линейного напряжения вторичной обмотки трансформатора
; U 2л – действующее значение линейного напряжения вторичной обмотки трансформатора
Если при расчетах  , то для ограничения прерывистых токов необходимо выбрать дроссель с индуктивностью
, то для ограничения прерывистых токов необходимо выбрать дроссель с индуктивностью 
Сглаживание пульсаций выпрямленного тока. Пульсации выпрямленного напряжения приводят к пульсации выпрямленного тока, которые ухудшают коммутацию двигателя и увеличивают его нагрев.
В симметричной мостовой и нулевой схемах амплитудные значения гармонических составляющих выпрямленного напряжения  связаны с его средним значением
связаны с его средним значением  и углом регулирования преобразователя γ следующим выражением
и углом регулирования преобразователя γ следующим выражением
где k = 1 – кратность гармоники, т.е. отношение порядкового номера гармоники к числу пульсаций; p = 6 – число пульсаций выпрямленного напряжения.
При известной амплитуде основной составляющей  и допустимому действующему значению основной гармоники тока
и допустимому действующему значению основной гармоники тока  необходимая индуктивность цепи выпрямленного тока может быть определена по формуле:
необходимая индуктивность цепи выпрямленного тока может быть определена по формуле:
 , (1.18)
, (1.18)
где 
Если при расчетах  , то для ограничения прерывистых токов необходимо выбрать дроссель с индуктивностью
, то для ограничения прерывистых токов необходимо выбрать дроссель с индуктивностью 
Управление тиристорами осуществляется с помощью программируемого микропроцессорного контроллера, обеспечивающего также контроль и защиту тиристорных секций.
Тиристорный преобразователь является существенно нелинейным устройством. Силовая часть и система импульсно-фазового управления описываются передаточной функцией преобразователя. При высокой частоте входного сигнала дискретностью можно пренебречь. Тогда с учетом инерционности СИФУ передаточную функцию тиристорного преобразователя можно записать в виде
 , (1.19)
, (1.19)
где  – постоянная времени запаздывания;
– постоянная времени запаздывания;  – постоянная времени СИФУ;
– постоянная времени СИФУ;  – постоянная времени тиристорного преобразователя;
– постоянная времени тиристорного преобразователя;  – коэффициент передачи тиристорного преобразователя;
– коэффициент передачи тиристорного преобразователя;  – число фаз.
– число фаз.
Тиристоры выбираются исходя из условий
 (1.20)
(1.20)

где  – средний ток тиристора в открытом состоянии;
– средний ток тиристора в открытом состоянии;
 – максимальный ток;
– максимальный ток;
 – напряжение тиристора;
– напряжение тиристора;
 – максимальное напряжение в закрытом состоянии;
– максимальное напряжение в закрытом состоянии;
 (1.21)
(1.21)
где  – коэффициент среднего тока вентиля для трехфазной мостовой схемы;
– коэффициент среднего тока вентиля для трехфазной мостовой схемы;  – коэффициент перегрузки по току.
– коэффициент перегрузки по току.
Выбор дросселей тиристорного преобразователя. 1. Определение индуктивностей  по формуле (1.17),
по формуле (1.17),  по формуле (1.18). Если значения
по формуле (1.18). Если значения  или
или  оказались больше, чем
оказались больше, чем  , то суммарная индуктивность
, то суммарная индуктивность  будет равна
будет равна

если значения или меньше, чем  , то
, то

2. Выбор дросселей по табл. П.2 для выбранного типа двигателя.
3. Расчет и выбор тиристоров по табл. П.3 для выбранного типа двигателя из условий (1.20).
4. Определение параметров передаточной функции тиристорного преобразователя (1.19).
ПРИМЕР 1.2а ( ≥
≥  ).Рассчитать индуктивности
).Рассчитать индуктивности  ,
,  и при необходимости выбрать дроссели для электропривода с двигателем типа 2ПБ132МУХЛ4 по примеру 1.1а. Произвести выбор тиристоров. Определить параметры передаточной функции тиристорного преобразователя.
и при необходимости выбрать дроссели для электропривода с двигателем типа 2ПБ132МУХЛ4 по примеру 1.1а. Произвести выбор тиристоров. Определить параметры передаточной функции тиристорного преобразователя.
Решение. 1. Определяем индуктивности  ,
,  и сравниваем их с индуктивностью якоря
и сравниваем их с индуктивностью якоря 

где 
Так как  = 0,012 Гн <
= 0,012 Гн <  = 0,013 Гн, то потребности в дросселе для ограничения прерывистых токов нет.
= 0,013 Гн, то потребности в дросселе для ограничения прерывистых токов нет.
Индуктивность сглаживающего дросселя

где 

Так как  = 0,005 Гн < = 0,013 Гн, то потребности в дросселе для ограничения пульсаций выпрямленного тока нет.
= 0,005 Гн < = 0,013 Гн, то потребности в дросселе для ограничения пульсаций выпрямленного тока нет.
2. Расчет и выбор тиристоров для выбранного типа двигателя.
Определяем значение  по формуле (1.21)
по формуле (1.21)

По табл. П.3 выбираем тиристор марки 16TTS12. Технические характеристики сводим в табл. 1.3.
Таблица 1.3
Технические характеристики выбранного тиристора
| Наименование | Максимальное напряжение в закрытом состоянии, В | Средний ток в открытом состоянии, А | Тип корпуса |
| 16TTS12 | TO209AB |
3. Определяем параметры передаточной функции тиристорного преобразователя.
- расчет постоянной времени запаздывания
- расчет постоянной времени СИФУ

Тогда постоянная времени тиристорного преобразователя

Рассчитываем коэффициент передачи тиристорного преобразователя

Определяем передаточную функцию тиристорного преобразователя по формуле (1.19)

ПРИМЕР 1.2б ( <
<  ).Рассчитать индуктивности , и при необходимости выбрать дроссели для электропривода с двигателем типа 2ПБ90МУХЛ4 по примеру 1.1б. Произвести выбор тиристоров. Определить параметры передаточной функции тиристорного преобразователя.
).Рассчитать индуктивности , и при необходимости выбрать дроссели для электропривода с двигателем типа 2ПБ90МУХЛ4 по примеру 1.1б. Произвести выбор тиристоров. Определить параметры передаточной функции тиристорного преобразователя.
Решение. 1. Определяем индуктивности , и сравниваем их с индуктивностью якоря

где 
Так как = 0,762 Гн > = 0,267 Гн, то для ограничения прерывистых токов необходимо выбрать дроссель с индуктивностью  . Таким образом, индуктивность дросселя для ограничения прерывистых токов
. Таким образом, индуктивность дросселя для ограничения прерывистых токов

По табл. П.2 выбираем дроссель марки ELC09D681F. Технические характеристики сводим в табл. 1.4.
Таблица 1.4
Технические характеристики выбранного дросселя
| Наименование | Индуктивность, мГн | Точность, % | Тестовая частота, кГц | Сопр-е пост. току, Ом | Пост. ток, А |
| ELC09D681F | 1,4 | 0,34 |
Индуктивность сглаживающего дросселя
где 

Так как  = 0,073 Гн > = 0,267 Гн, то потребности в дросселе для ограничения пульсаций выпрямленного тока нет.
= 0,073 Гн > = 0,267 Гн, то потребности в дросселе для ограничения пульсаций выпрямленного тока нет.
2. Выбор тиристоров для выбранного типа двигателя.
Определяем значение по формуле (1.21)

По табл. П.3 выбираем тиристор марки 10TTS08. Технические характеристики сводим в табл. 1.5.
Таблица 1.5
Технические характеристики выбранного тиристора
| Наименование | Максимальное напряжение в закрытом состоянии, В | Средний ток в открытом состоянии, А | Тип корпуса |
| 10TTS08 | 6,5 | TO220AB |
3. Определяем параметры передаточной функции тиристорного преобразователя.
- расчет постоянной времени запаздывания

- расчет постоянной времени СИФУ

Тогда

Рассчитываем коэффициент передачи тиристорного преобразователя

Определяем передаточную функцию тиристорного преобразователя по формуле (1.19)

Тахогенератор
Тахогенераторы преобразуют частоту вращения вала двигателя в электрический сигнал (выходное напряжение) [17]. Зависимость выходного напряжения тахогенератора  от частоты вращения ротора (якоря) n определяется выходной характеристикой. Уравнение идеальной выходной характеристики тахогенератора:
от частоты вращения ротора (якоря) n определяется выходной характеристикой. Уравнение идеальной выходной характеристики тахогенератора:
 (1.22)
(1.22)
где  , мВ/(об/мин) – крутизна выходной характеристики, определяющая чувствительность тахогенератора к изменениям частоты вращения. Чем больше крутизна
, мВ/(об/мин) – крутизна выходной характеристики, определяющая чувствительность тахогенератора к изменениям частоты вращения. Чем больше крутизна  , тем чувствительнее и точнее тахогенератор.
, тем чувствительнее и точнее тахогенератор.
По принципу действия и устройству тахогенераторы бывают постоянного и переменного тока. В системе представлен тахогенератор постоянного тока – коллекторная машина постоянного тока с независимым возбуждением работающая в генераторном режиме. На рис 1.5 показана электрическая схема тахогенератора постоянного тока с электромагнитным возбуждением. На выходе тахогенератора устанавливается фильтр нижних частот с конденсатором С 1 и делитель напряжения с сопротивлениями R д1, R д2.
Обмотка возбуждения тахогенератора подключается к источнику постоянного тока. Если якорь возбужденного тахогенератора привести во вращение с частотой n, то на его выходе появится постоянное напряжение

где  – сопротивление обмотки якоря, Ом;
– сопротивление обмотки якоря, Ом;  – сопротивление нагрузки; Ф – магниный поток; се – конструктивная постоянная. Для больших значений
– сопротивление нагрузки; Ф – магниный поток; се – конструктивная постоянная. Для больших значений  выражение приводится к виду (1.22).
выражение приводится к виду (1.22).
Рис. 1.5. Тахогенератор постоянного тока
Коэффициент передачи обратной связи контура скорости определяется по формуле
 (1.23)
(1.23)
где  – сигнал обратной связи, равный напряжению суммирующего усилителя контура скорости.
– сигнал обратной связи, равный напряжению суммирующего усилителя контура скорости.
С учетом коэффициента передачи делителя  коэффициент обратной связи определяется по формуле
коэффициент обратной связи определяется по формуле

где  - коэффициент передачи мультипликатора (q 2), служащего для согласования скоростей двигателя и тахогенератора.
- коэффициент передачи мультипликатора (q 2), служащего для согласования скоростей двигателя и тахогенератора.
Тогда  - коэффициент передачи делителя напряжения.
- коэффициент передачи делителя напряжения.
Необходимое значение коэффициента  устанавливается переменным резистором
устанавливается переменным резистором  . Передаточная функция фильтра нижних частот с делителем напряжения определяется на основании схемы (см. рис.1.5)
. Передаточная функция фильтра нижних частот с делителем напряжения определяется на основании схемы (см. рис.1.5)

Обозначив постоянную времени фильтра

и коэффициент передачи делителя

получим

ПРИМЕР 1.3а ( ≥ ).Выбрать тахогенератор для электропривода с двигателем типа 2ПБ132МУХЛ4 по примеру 1.1а. Рассчитать и выбрать RC -элементы фильтра. Определить параметры передаточной функции датчика скорости.
Решение. 1. По табл. П4 в приложении выбираем тахогенератор типа ТП20-6-0,5 со значением крутизны характеристики  Технические характеристики сведены в табл. 1.6.
Технические характеристики сведены в табл. 1.6.
Таблица 1.6
Технические характеристики тахогенератора
| Типоразмер | Cu, мВ/(об/мин) | R нг, 103 Ом | n тг, об/мин |
| ТП20-6-0,5 | 6,0 |
Переведем значение крутизны выходной характеристики в  :
:
2. Производим расчет и выбор RC -элементов фильтра.
Определяем передаточное число мультипликатора q 2:

где 
Определяем коэффициент передачи делителя

где коэффициент передачи датчика скорости

Так как  меньше единицы, то необходимо выбрать делитель напряжения с коэффициентом
меньше единицы, то необходимо выбрать делитель напряжения с коэффициентом

Откуда

Значение сопротивления  принимаем
принимаем  тогда
тогда

Приводим значение сопротивления  к номиналу по табл. П.5
к номиналу по табл. П.5

Примем предварительно значение постоянной фильтра  и определим емкость конденсатора
и определим емкость конденсатора 

Приводим значение емкости к номиналу по табл. П.6
 2,2 мкФ.
2,2 мкФ.
Выбираем конденсатор Panasonic серии NHG на рабочее напряжение 50 В и пересчитываем постоянную времени фильтра

3. Передаточная функция датчика скорости

ПРИМЕР 1.3б ( < ).Выбрать тахогенератор для электропривода с двигателем типа 2ПБ90МУХЛ4 по примеру 1.1б. Рассчитать и выбрать RC -элементы фильтра. Определить параметры передаточной функции датчика скорости.
Решение. 1. По табл. П4 в приложении выбираем тахогенератор типа ТП20-4-0,5 со значением крутизны характеристики  Технические характеристики сведены в табл. 1.7.
Технические характеристики сведены в табл. 1.7.
Таблица 1.7
Технические характеристики тахогенератора
| Типоразмер | Cu, В/(об/мин) | R нг, 103 Ом | n тг, об/мин |
| ТП20-4-0,5 | 4,0 |
Переведем значение крутизны выходной характеристики в :

2. Производим расчет и выбор RC -элементов фильтра.
Определяем передаточное число мультипликатора q 2:

где 
Определяем коэффициент передачи делителя
где коэффициент передачи датчика скорости

Так как меньше единицы, то необходимо выбрать делитель напряжения
Откуда

Значение сопротивления  принимаем
принимаем  тогда
тогда

Приводим значение сопротивления  к номиналу по табл. П.5
к номиналу по табл. П.5

Примем значение постоянной фильтра  и определим емкость конденсатора
и определим емкость конденсатора

Приводим значение емкости к номиналу по табл. П.6
 1,0 мкФ.
1,0 мкФ.
Выбираем конденсатор Panasonic серии NHG на рабочее напряжение 50 В и пересчитываем постоянную времени фильтра

2. Передаточная функция датчика скорости

Вращающийся трансформатор
В следящих позиционных ЭП широкое применение получили вращающиеся трансформаторы, представляющие собой электрические индукционные микромашины [3]. Прецизионные вращающиеся трансформаторы обеспечивают точностные характеристики в пределах ±(2÷10) угловых минут.
Для пояснения принципа действия рассмотрим схему включения ВТ в режиме измерителя рассогласования (рис.1.6), пропорционального разности углов поворота задающего и исполнительного валов ЭП

Ротор датчика ТС кинематически связан с задающим, а ротор приемника ТЕ – с исполнительным валом ЭП.
При повороте задающего вала на угол  переменный ток, протекающий в статорной обмотке возбуждения (В1, В2) создает пульсирующий магнитный поток, который наводит в обмотках ротора ЭДС. Тогда выражения для напряжений на косинусной (К1, К2) и синусной (С1, С2) обмотках, соответственно, ротора датчика ТС, запишутся в виде тригонометрических соотношений
переменный ток, протекающий в статорной обмотке возбуждения (В1, В2) создает пульсирующий магнитный поток, который наводит в обмотках ротора ЭДС. Тогда выражения для напряжений на косинусной (К1, К2) и синусной (С1, С2) обмотках, соответственно, ротора датчика ТС, запишутся в виде тригонометрических соотношений


где  – коэффициент трансформации между обмоткой возбуждения и вторичной обмоткой.
– коэффициент трансформации между обмоткой возбуждения и вторичной обмоткой.
Напряжения U х и U у, благодаря трехпроводной цепи синхронизации создают переменный магнитный поток, возбуждающий приемник ТЕ. На выходной статорной обмотке ТЕ формируется электрический сигнал рассогласования


Рис. 1.6. Схема включения вращающихся трансформаторов
Преобразуем к виду:

Произведение  определяет чувствительность измерителя или крутизну его характеристики.
определяет чувствительность измерителя или крутизну его характеристики.
Введем обозначение:
 – коэффициент передачи ВТ, тогда
– коэффициент передачи ВТ, тогда
 (1.23)
(1.23)
Статическая характеристика измерителя рассогласования на ВТ показана на рис. 1.7 и имеет нелинейный характер, что приводит к нежелаемому изменению крутизны его характеристики при больших значениях рассогласования 

Рис. 1.7. Статическая характеристика измерителя рассогласования на вращающихся трансформаторах
Следует отметить, что рассматриваемая схема обладает свойством самосинхронизации и при отклонениях Δα<1800 измеритель автоматически устраняет рассогласование (в направлении, показанном стрелками, рис.1.7) и привод приходит в состояние устойчивого равновесия (начало координат). Режим слежения характеризуется малыми отклонениями (±100) Δα.
Заменяя в выражении (1.23)  получим
получим

При малых значениях рассогласования измеритель будет функционировать на линейном участке статической характеристики, обеспечивая, тем самым, требуемые точностные характеристики. Кроме того для снижения искажений полезного сигнала применяют так называемое «симметрирование» ВТ, которое заключается в определенном подборе сопротивлений нагрузок квадратурной обмотки статора В3В4 (первичное симметрирование) и косинусной обмотки ротора К1К2 (вторичное симметрирование).
ПРИМЕР 1.4а ( ≥ ).Выбрать СКВТ для электропривода с двигателем типа 2ПБ132МУХЛ4 и рассчитать его коэффициент передачи. Угол поворота исполнительного вала электропривода  град.
град.
Решение. По табл. П7 выбираем СКВТ типа ВТМ-4А с параметрами: напряжение возбуждения  В; частота тока возбуждения
В; частота тока возбуждения  ; коэффициент трансформации
; коэффициент трансформации  ; частота вращения
; частота вращения  об/мин.
об/мин.
При малом отклонении исполнительного вала электропривода сигнал на выходе вращающегося трансформатора

Максимальный угол поворота исполнительного вала электропривода
 рад.
рад.
Коэффициент передачи вращающегося трансформатора
 В/рад.
В/рад.
ПРИМЕР 1.4б ( < ). Выбрать СКВТ для электропривода с двигателем типа 2ПБ90МУХЛ4 и рассчитать его коэффициент передачи. Угол поворота исполнительного вала электропривода  град.
град.
Решение. По табл. П7 выбираем СКВТ типа ВТМ-4А с параметрами: напряжение возбуждения В; частота тока возбуждения ; коэффициент трансформации ; частота вращения об/мин.
При малом отклонении исполнительного вала электропривода сигнал на выходе вращающегося трансформатора
Максимальный угол поворота исполнительного вала электропривода
 рад.
рад.
Коэффициент передачи вращающегося трансформатора
 В/рад.
В/рад.
Операционные усилители
Операционные усилители (ОУ) — это усилители постоянного тока, предназначенные для осуществления как линейных, так и нелинейных преобразований сигналов, причем вид преобразования (операция) определяется лишь структурой внешней по отношению к усилителю сменной цепи обратной связи. При этом один и тот же ОУ, в зависимости от подключаемой к нему цепи обратной связи, может производить инвертирование, интегрирование, нелинейное функциональное преобразование входного сигнала, суммирование (с разными весами и знаками) нескольких сигналов, перемножение мгновенных значений двух сигналов и др.
Универсальность ОУ и высокая точность выполнения операций, задаваемых структурой цепи обратной связи, обеспечиваются высоким коэффициентом усиления ОУ (К U без обратной связи достигает 105 и выше), высоким входным и низким выходным сопротивлениями, а также малым дрейфом нуля. Для обеспечения устойчивости ОУ при работе с разнообразными цепями обратной связи (возможно с комплексным коэффициентом передачи) осуществляется тщательный выбор его амплитудно-частотной и фазочастотной характеристик (АЧХ и ФЧХ) и принимаются меры, гарантирующие их стабильность.
На рис. 1.8. показана схема операционного усилителя и его 5 выводов:
1. U 1 – сигнал на неинвертирующем входе;
2. U 2 – сигнал на инвертирующем входе;
3. U вых – выходной сигнал;
4. + U пит - положительный вывод питания;
5. - U пит - отрицательный вывод питания.
Рис. 1.8. Схема операционного усилителя
При подаче сигнала на неинвертирующий вход приращение выходного сигнала совпадает по знаку (фазе) с приращением входного сигнала. Если же сигнал подан на инвертирующий вход, то приращение выходного сигнала имеет обратный знак (противоположный по фазе) по сравнению с приращением входного сигнала.
Двуполярное питание обеспечивает возможность инверсии знака напряжения на инвертирующем входе U 2, т.е. при подаче на вход U 2 положительного сигнала на выходе сигнал будет отрицательным. Напряжение питания ОУ обычно +15 В/-15В.
В ОУ без обратной связи коэффициент усиления К U сильно зависит от частоты (K U падает с увеличением частоты как показано на (рис. 1.9, кривая 1), поэтому для создания "плоской АЧХ" вводят корректирующие RC-цепи (кривые 2 и 3). Для балансировки нуля также используют внешний переменной резистор.

Рис. 1.9. Графики АЧХ
Кроме того, при высоком значении коэффициента усиления трудно управлять усилителем и удерживать его от насыщения. Если часть выходного сигнала направить обратно на вход в противофазе с входным сигналом, т.е. создать отрицательную обратную связь, то усилитель будет более стабильным, но это приведет к снижению коэффициента усиления. Типичные схемы включения ОУ с отрицательной обратной связью имеют коэффициент усиления от 10 до 1000, тогда как коэффициент усиления ОУ без обратной связи находится в диапазоне от 105 до 107. Если обратная связь положительна, усилитель переходит в режим генерации, т.е. становится автогенератором.
Для питания ОУ применяются блоки питания со стабилизацией напряжения, позволяющие получить стабильные параметры и точность регулирования. Для построения блока питания можно применить специализированные микросхемы, имеющие в своем составе сложные стабилизаторы напряжения и устройства защиты нагрузки и сети от аварийных режимов, позволяющие максимально упростить конструкцию и размеры схемы. На рис. 1.10 приведен пример построения блока питания операционных усилителей на базе микросхем LM317 и LM337 производства National Semiconductor, выпускаемые в корпусах ТО-220. Данные микросхемы имеют всего 3 вывода (вход, выход и коррекция, см. рис. 1.10) и требуют для своей работы минимум элементов. В зависимости от мощности, питаемой нагрузки, микросхемы могут устанавливаться на теплоотводящих радиаторах, при этом максимальная нагрузка составляет 1,5А.
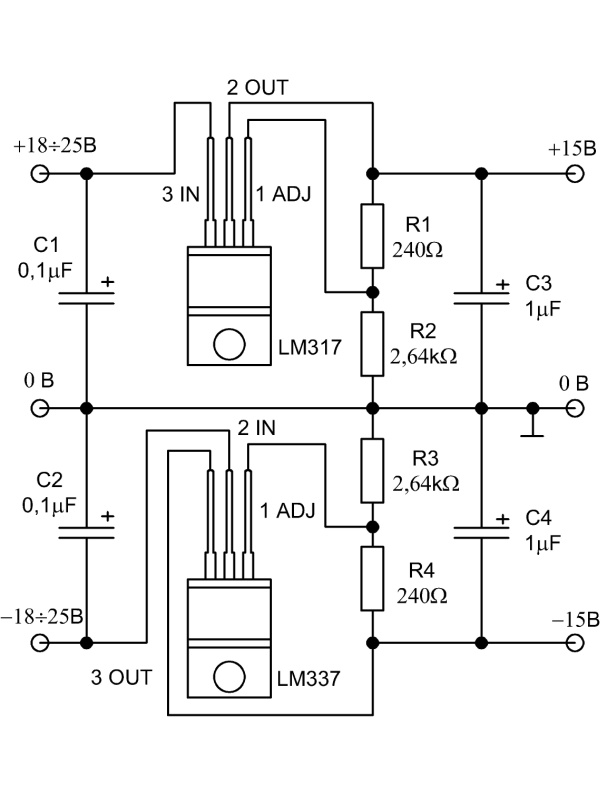

Рис. 1.10. Схема блока питания на стабилизаторах и
назначение выводов микросхем в корпусе ТО-220
На схеме блока питания представлены конденсаторы С 1 и С 2, образующие фильтр на входе.
Фильтр предназначен для сглаживания напряжения после выпрямителя. Обычно используется электролитический конденсатор достаточно большой емкости.
Выбор конденсаторов производится в соответствии с его рабочим напряжением. Необходимо выбирать конденсаторы с запасом по напряжению примерно 41%. Например, в блоке питания на 5 В вторичная обмотка трансформатора будет на 7 - 10 В. С учетом повышения напряжения на 41% необходимо выбрать конденсатор на напряжение не менее 14 В, для стандартного ряда – 25 В.
На выходе фильтра установлен стабилизатор напряжения (LM317, LM337). Данная микросхема служит для стабилизации диапазона напряжений.
Мощность, выделяемая на микросхеме (рассеиваемая микросхемой), определяется так:

Если мощность получается больше, чем 0,5-0,7 Вт, то нужно использовать теплоотводящий радиатор.
Выходное напряжение блока питания может быть выбрано в диапазоне от 1,25 до 30 вольт и зависит от соотношения сопротивлений R 1 и R 2 (R 3 и R 4), причем величина  рекомендуется производителем:
рекомендуется производителем:

Отсюда можно найти значение сопротивления R 2 для получения требуемого напряжения на выходе.

В нашем случае, для работы операционных усилителей требуется ±15 вольт, значит величина R 2 должна быть равна:

Выбираем сопротивление MPR2400 с номиналом соответствующим номинальному ряду Е192, т.е. 2,64 кОм по табл. П.5.
После стабилизаторов на выходе блока питания установлены конденсаторы С 3 и С 4 для предотвращения самовозбуждения микросхем стабилизаторов. Для каждой микросхемы используют два конденсатора: один на вход, другой на выход. Если проводник, соединяющий эти конденсаторы с микросхемой, имеет длину более 7 см, то необходимо дополнительно установить конденсаторы возле микросхемы стабилизатора. Емкости С 3 и С 4 должны выбираться в диапазоне от 0,1 мкФ до 4,7 мкФ.
Отчётные материалы
1. Выбор и расчет двигателя.
2. Расчет и выбор дросселей и тиристоров ТП.
3. Выбор и расчет датчика скорости.
4. Выбор и расчет вращающегося трансформатора.
Контрольные вопросы
1. Пояснить принцип действия и назначение элементов цифро-аналогового следящего привода (рис. 1.1).
2. Записать уравнения электрического и механического равновесия двигателя.
3. Пояснить особенности выбора и расчета двигателей следящих электроприводов.
4. Привести основные формулы расчёта параметров ССДМ двигателя.
5. Описать схему силовой части ТП.
6. Пояснить принцип действия ТП на примере однофазного мостового выпрямителя.
7. Привести формулы расчета дросселей и тиристоров ТП.
8. Пояснить особенности расчета датчика скорости.
9. Пояснить принцип действия вращающегося трансформатора.
10. Пояснить принцип действия преобразователя «угол-фаза-код».
11. Пояснить схему и перечислить основные параметры операционного усилителя.
12. Пояснить особенности работы блока питания операционного усилителя.
ЛАБОРАТОРНАЯ РАБОТА № 2

