Механизмнің құрылымдық талдауы деп оның буындар мен КЖ санын анықтау, КЖ классификациясын жүргізу, механизмнің еркіндік дәрежесін, класы мен реттілігін анықтауды атайды. Құрылымдық синтез деп қозғалмайтын және қозғалатын буындар мен КЖ-тардан тұратын механизмнің құрылымдық сұлбасын жобалауды атайды.

 Құрылымдық сұлбасын анықтау үшін жетекші буынға немесе негізгі механизмге Ассурдың құрылымдық топтарын қосу әдісі қолданылады.
Құрылымдық сұлбасын анықтау үшін жетекші буынға немесе негізгі механизмге Ассурдың құрылымдық топтарын қосу әдісі қолданылады.
|
Ассур тобы деп оны тіреуге сыртқы КЖ-тар элементтерімен қосқанда еркіндік дәрежесі нөлге тең болатын КТ-ті атайды. Ассур топтарының құрылымдық формулалары (8.3) формуласынан шығады: W=3n—2p5, осыдан p5 = 3n/2, мұндағы n – қозғалатын буындар саны. Осыдан топтағы 5-і класс КЖ саны міндетті түрде жұп саны болатыны анық. 8.9 суретте екі 2-буынды топтардың жетекші буынға қосылудың мысалы көрсетілген.
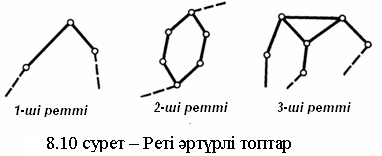
Механизм класы мен реттілігі оған кіретін ең жоғарғы класты топ бойынша анықталады. Топ реттілігі оның негізгі механизмге қосылатын элементтер санына тең (8.10 сурет).
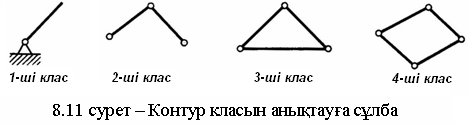
Топ класы оған кіретін ең жоғарғы класты контурының класы арқылы анықталады. Контур класы оның буындары кіретін КЖ санымен анықталады (8.11 сурет). Топ класының нөмері ішкі КЖ арқылы жасалған тұйық контурге кіретін КЖ санына тең, бұдан өзге 2-буынды топты шартты түрде екінші класқа жатқызады.
Механизмнің класы мен реттілігі оның жетекші буынына тәуелді. Топтардың қабатталып қосылуы буындары қатты дене болып табылатын механизмдер үшін қолданылады.
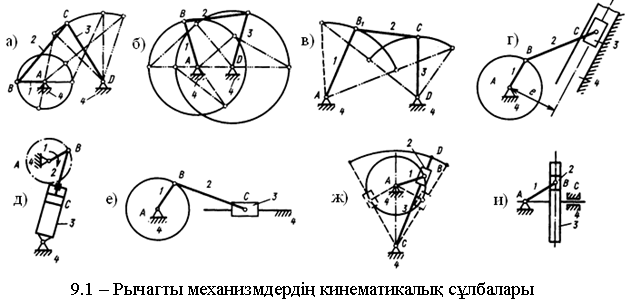
Дәріс. Жазық рычагты механизмдердің кинематикалық және кинетостатикалық талдауы
Дәрістің мазмұны: жазық рычагты механизмдердің графаналитикалық әдісімен кинематикалық және кинетостатикалық талдауы.
Дәрістің мақсаты: Жазық рычагтымеханизмдердің кинематикасын және кинематикалық жұптардағы реакцияларды графаналитикалық әдісімен талдау тәсілдерін игеру.
Жалпы мәліметтер және жазық рычагты механизмдердің түрлері
Рычагты механизмдер арасында ең кеңінен қолданылатын жазық төрт буынды механизмдер. Оларда төрт топса(топсалы төртбуын), үш топса мен бір ілгерілемелі жұп немесе екі топса мен екі ілгерілемелі жұп болуы мүмкін.
Буындар ұзындықтарының қатынасына байланысты (Грасгоф ережесі) 9.1, а,б,в суреттерінде көрсетілген топсалы төртбуындар иінтіректі-күйентелі, екі иінтіректі немесе екі күйентелі механизм деп аталады. 9.1, г,д,е,ж суреттерінде көрсетілген механизмдер сәйкес центрлік емес, теңселетін цилиндрмен, центрлік, теңселетін кулисамен иінтіректі-жылжымалы механизм, ал 9.1 и суретте – синустік механизм деп аталады.