




В курсовой работе предусматривается решение задач. Дадим краткие методические указания по теме работы 13.
При гармонических колебаниях движение тела может быть задано одним из выражений
x(t) = A cos (ω0t + α), x(t) = A sin(ω0t + β),
x(t) = A1 cosω0t + A2 sinω0t,
где β = α + π/2, A1 = A cos α, A2 = - A sin α, А2 = A21 + A22.
Так как любое из этих выражений легко можно представить в виде двух других, мы будем использовать в дальнейшем какую-нибудь одну форму представления колебаний, например, первую.
Если известен закон движения тела (т.е. амплитуда, циклическая частота и начальная фаза колебаний), то основные характеристики системы, совершающей гармонические колебания, легко найти на основании определений:
Период и частота колебаний связаны с циклической частотой соотношениями (2) и (4).
Смещение тела относительно положения равновесия в произвольный момент времени определяется уравнением движения (1), записанным для этого момента времени.
Скорость тела изменяется со временем по такому же гармоническому закону, что и его координата, но изменение скорости «опережает по фазе» изменение координаты на величину  ; т.е. в те моменты времени, когда смещение тела относительно положения равновесия достигает максимальных значений (крайние точки), скорость тела равна нулю, и, наоборот, - в положении равновесия скорость тела максимальна и равна
; т.е. в те моменты времени, когда смещение тела относительно положения равновесия достигает максимальных значений (крайние точки), скорость тела равна нулю, и, наоборот, - в положении равновесия скорость тела максимальна и равна  . Скорость тела в любой момент времени направлена по касательной к траектории в сторону движения, а ее величина определяется выражением (7).
. Скорость тела в любой момент времени направлена по касательной к траектории в сторону движения, а ее величина определяется выражением (7).
Ускорение тела изменяется со временем по такому же закону, что и его координата и скорость, но изменение ускорения «опережает по фазе» изменение координаты на величину π, а скорости на величину ; т.е. в те моменты времени, когда смещение тела относительно положения равновесия максимально, его ускорение также максимально и равно  , а в положении равновесия ускорение равно нулю. Следует помнить, что при гармонических колебаниях ускорение тела всегда направлено к положению равновесия (т.е. противоположно смещению) и в произвольный момент времени определяется выражением (10) или (11).
, а в положении равновесия ускорение равно нулю. Следует помнить, что при гармонических колебаниях ускорение тела всегда направлено к положению равновесия (т.е. противоположно смещению) и в произвольный момент времени определяется выражением (10) или (11).
Потенциальная и кинетическая энергии тела в процессе движе ния изменяются по законам (24) и (25), причем таким образом, что когда одна из них увеличивается, другая – уменьшается. Потенциальная энергия имеет максимальное значение

в крайних точках, а кинетическая
- в положении равновесия. Полная энергия при гармонических колебаниях остается постоянной и равной максимальной потенциальной  или максимальной кинетической
или максимальной кинетической  энергии. Средние за период колебаний значения потенциальной и кинетической энергии одинаковы и равны половине полной энергии.
энергии. Средние за период колебаний значения потенциальной и кинетической энергии одинаковы и равны половине полной энергии.
В ряде задач, прежде чем приступить к определению тех или иных характеристик колеблющейся системы, необходимо составить уравнение гармонических колебаний
 ,
,
в которое входят три величины – амплитуда A, начальная фаза α и циклическая частота  - значения которых требуется определить из условий конкретной задачи.
- значения которых требуется определить из условий конкретной задачи.
Для определения частоты колебаний существует несколько способов. Можно:
- привести уравнение движения тела к виду  , которое называют дифференциальным уравнением гармонических колебаний;
, которое называют дифференциальным уравнением гармонических колебаний;
- использовать теорему о полной механической энергии и полученное выражение продифференцировать по времени. В результате также получим уравнением гармонических колебаний;
- использовать связь восстанавливающей силы со смещением (14), а циклическую частоту определить через коэффициент возвращающей силы в соответствии с (12).
Для определения частоты гармонических колебаний первым способом можно придерживаться следующей схемы;
а) сделать схематический чертеж, на котором изобразить тело, колебания которого исследуются, в положении равновесия. Мысленно заменить данное тело телом другой массы. Если при этом положение равновесия изменится, то следует записать условие равновесие данного тела. Если же при замене тела положение равновесия останется прежним, то условие равновесия можно не писать;
б) мысленно сместить тело из положения равновесия и отпустить. Представить, по какой траектории будет двигаться тело, предоставленное самому себе, и изобразить на рисунке положение тела в произвольный момент движения (исключая положение равновесия и крайние точки). Изобразить на чертеже все силы, действующие на тело в данный момент движения;
в) ввести удобную систему координат, одну из осей которой (например, ось ОХ) направить вдоль движения в сторону увеличения смещения;
г) записать уравнение движения тела 
 в проекции на выбранную ось в виде
в проекции на выбранную ось в виде  =
= 
 ,
,
д) записать результирующую силу Fx =  с учетом условия равновесия и дополнительных условий задачи (например, условия малости колебаний, которое означает, что смещения тела относительно положения равновесия малы по сравнению с другими размерами системы). При этом два или более слагаемых в
с учетом условия равновесия и дополнительных условий задачи (например, условия малости колебаний, которое означает, что смещения тела относительно положения равновесия малы по сравнению с другими размерами системы). При этом два или более слагаемых в  должны сократиться, а результирующая сила Fx - приобрести вид Fx = - kx, где k - некоторая положительная постоянная. В этом случае сила Fx будет возвращающей и будет выполнено условие (13), необходимые для наличия гармонических колебаний, а уравнение движения тела примет вид
должны сократиться, а результирующая сила Fx - приобрести вид Fx = - kx, где k - некоторая положительная постоянная. В этом случае сила Fx будет возвращающей и будет выполнено условие (13), необходимые для наличия гармонических колебаний, а уравнение движения тела примет вид
max + kx = 0, ax + ω02 x = 0,
где ω0 =  - циклическая частота колебаний.
- циклическая частота колебаний.
Рассмотрим, как можно получить значение частоты ω0 колебаний, используя теорему о полной механической энергии. Для этого следует:
а) выполнить пункты а - в, записанные для первого способа;
б) если при движении тела меняется его высота относительно поверхности Земли, то следует выбрать нулевой уровень отсчета потенциальной энергии на уровне положения равновесия тела (такой выбор не обязателен, но наиболее удобен);
в) записать теорему о полной механической энергии
Е2 – Е1 = А(Fстор) (67)
при перемещении тела из начального положения в положение, соответствующее смещению тела относительно положения равновесия на величину х. Поскольку при определении частоты колебаний мы сами задаем начальные параметры системы (например, начальное смещения из положения равновесия), то начальная энергия будет равна полной энергии колебаний, т.е. Е1 = const. В произвольный момент движения система будет иметь кинетическую энергию  , потенциальную U и полную Е2= + U. Если при движении тело смещается по вертикали, то его потенциальная энергия в поле тяжести Земли равна ± mgx, где знак «+» соответствует положению тела выше положения равновесия, знак «-» - ниже. Если тело совершает колебания на пружине жесткостью k, то в выражение для U войдет энергия пружины
, потенциальную U и полную Е2= + U. Если при движении тело смещается по вертикали, то его потенциальная энергия в поле тяжести Земли равна ± mgx, где знак «+» соответствует положению тела выше положения равновесия, знак «-» - ниже. Если тело совершает колебания на пружине жесткостью k, то в выражение для U войдет энергия пружины  , где х1 - деформация пружины в начальном положении. Поэтому в общем случае U = ± mgx+ . Если в процессе движения на тело действуют сторонние силы, то следует найти работу этих сил на рассматриваемом перемещении. В рамках школьной программы сторонние силы либо работы не совершают (перпендикулярны направлению движения), либо линейно зависят от величины перемещения (например, при колебаниях на границе раздела “воздух-жидкость” сила Архимеда пропорционально глубине погружения тела в жидкость). В общем случае А(Fстор)=
, где х1 - деформация пружины в начальном положении. Поэтому в общем случае U = ± mgx+ . Если в процессе движения на тело действуют сторонние силы, то следует найти работу этих сил на рассматриваемом перемещении. В рамках школьной программы сторонние силы либо работы не совершают (перпендикулярны направлению движения), либо линейно зависят от величины перемещения (например, при колебаниях на границе раздела “воздух-жидкость” сила Архимеда пропорционально глубине погружения тела в жидкость). В общем случае А(Fстор)=  (Fстор,1+ Fстор,2), где Fстор,1 и Fстор,2 - значение сторонних сил в начальном и конечном положениях тела, причем Fстор,2 х;
(Fстор,1+ Fстор,2), где Fстор,1 и Fстор,2 - значение сторонних сил в начальном и конечном положениях тела, причем Fстор,2 х;
г) записать теорему о полной механической энергии в виде

 mgx+
mgx+  (68)
(68) 
и взять производную по времени от левой и правой его частей с учетом, что
 ,
,  ,
,  ,
,  .
.
В результате получим уравнение, которое с учетом условия равновесия примет вид уравнения движения ах + ω02 х = 0, где коэффициент ω0 - циклическая частота колебаний.
Рассмотрим, наконец, третий способ определения частоты колебаний через коэффициент возвращающей силы. Для этого нужно поступить следующим образом:
а) выполнить пункты а - в, записанные для первого способа;
б) спроецировать силы, действующие на тело в произвольный момент движения, на выбранную ось ОХ, и записать выражение для результирующей силы в виде Fx =  , в которое со знаком “плюс” войдут проекции сил, направленных от положения равновесия), а со знаком «минус» - проекции сил, которые составляют тупой угол с осью (т.е. направлены к положению равновесия);
, в которое со знаком “плюс” войдут проекции сил, направленных от положения равновесия), а со знаком «минус» - проекции сил, которые составляют тупой угол с осью (т.е. направлены к положению равновесия);
в) записать выражение для результирующей силы Fx c учётом условия равновесия;
г) если сила Fx примет вид Fx = - kx, то тело будет совершать гармонические колебания, при которых коэффициент k возвращающей силы связан с циклической частотой выражениями (14) - (15). Если Fx ≠ - kx, то следует учесть дополнительные условия задачи, чтобы привести Fx к требуемому виду;
д) по известному коэффициенту возвращающей силы определить циклическую частоту колебаний.
Все три рассмотренных способа равноправны и приводят к одинаковому результату. Однако второй способ наиболее сложен, поэтому к нему следует прибегать только в крайних случаях.
Если исследуются колебания математического или пружинного маятника, циклическая частота может быть определена через параметры системы (длину нити, жесткость пружины и массу маятника) с помощью формул (15) или (36) соответственно.
Период (и частота) колебаний математического маятника, находящегося в шахте или на горе, зависит от ускорения свободного падения в месте нахождения маятника и может быть определён с помощью формул (38) или (39). Если на математический маятник, кроме силы тяжести и силы натяжения нити, действуют и другие внешние постоянные силы Fk, то циклическая частота (или период) колебаний может быть определена по формуле (44) или (45), где
 . Такой внешней силой может быть сила Архимеда (если маятник целиком находится в жидкости), сила Кулона (если маятник имеет заряд и существует внешнее электрическое поле), сила притяжения магнита (если груз маятника представляет собой железный шарик, помещенный вблизи постоянного магнита) и др. Если точка подвеса маятника движется с постоянным ускорением a0 (например, если маятник установлен на ракете, в лифте и т.п.), то циклическая частота и период колебаний могут быть найдены по тем же формулам (44) и (45), где величина gэфф определяется выражением (47). Следует помнить, что gэфф равно модулю геометрической суммы векторов, поэтому в общем случае для его определения нужно применить теорему косинусов.
. Такой внешней силой может быть сила Архимеда (если маятник целиком находится в жидкости), сила Кулона (если маятник имеет заряд и существует внешнее электрическое поле), сила притяжения магнита (если груз маятника представляет собой железный шарик, помещенный вблизи постоянного магнита) и др. Если точка подвеса маятника движется с постоянным ускорением a0 (например, если маятник установлен на ракете, в лифте и т.п.), то циклическая частота и период колебаний могут быть найдены по тем же формулам (44) и (45), где величина gэфф определяется выражением (47). Следует помнить, что gэфф равно модулю геометрической суммы векторов, поэтому в общем случае для его определения нужно применить теорему косинусов.
Частота и период колебаний пружинного маятника, в отличие от математического, не зависят от наличия внешних сил и ускорения точки подвеса и определяются только параметрами системы - жёсткостью пружины и массой маятника.
Выясним теперь, как можно определить амплитуду и начальную фазу колебаний.
Для того чтобы тело пришло в движение, можно: а) сместить его из положения равновесия на величину X0 и предоставить самому себе; б) сообщить ему некоторую начальную скорость v0 в направлении возможного движения; в) сделать то и другое, т.е. задать начальное смещение x0 и сообщить скорость v0. При этом x0 и v0 называют начальными условиями движения.
Если значения x0 и v0 известны (заданы или определены из дополнительных условий задачи), то амплитуда A и начальная фаза  колебаний могут быть найдены с помощью формул (17). Как следует из (17), если в начальный момент движения тело было смещено из положения равновесия и отпущено без начальной скорости, то начальная фаза колебаний равна нулю, если же x0 = 0, а v0 ≠ 0, то начальная фаза
колебаний могут быть найдены с помощью формул (17). Как следует из (17), если в начальный момент движения тело было смещено из положения равновесия и отпущено без начальной скорости, то начальная фаза колебаний равна нулю, если же x0 = 0, а v0 ≠ 0, то начальная фаза  . Следует отметить, что соотношения (17) справедливы лишь для маятников, совершающих гармонические колебания по закону косинуса. Если же колебания происходят по закону синуса, то формула для амплитуды не изменится, а начальную фазу следует искать по формуле
. Следует отметить, что соотношения (17) справедливы лишь для маятников, совершающих гармонические колебания по закону косинуса. Если же колебания происходят по закону синуса, то формула для амплитуды не изменится, а начальную фазу следует искать по формуле  .
.
Если найдены циклическая частота колебаний, их амплитуда и начальная фаза, то, записав уравнение колебаний, можно найти любые характеристики системы.
Наконец, могут встретиться задачи, в которых тело, совершающее гармонические колебания, подвергается воздействию внешней периодически изменяющейся силы. При этом в системе будут наблюдаться вынужденные колебания, амплитуда которых зависит от частоты вынуждающей силы в соответствии с формулой (63). Если затухание в системе мало, то при приближении частоты вынуждающей силы к собственной частоте  0 в системе будет наблюдаться резонанс, при котором амплитуда колебаний достигает максимально возможных значений (64). При решении задач, в которых на тело в процессе колебаний действует какая-либо внешняя периодическая сила, кроме собственной частоты 0, требуется определить частоту этой силы по условию конкретной задачи. Дальнейшее решение может быть основано на формулах (61) - (65).
0 в системе будет наблюдаться резонанс, при котором амплитуда колебаний достигает максимально возможных значений (64). При решении задач, в которых на тело в процессе колебаний действует какая-либо внешняя периодическая сила, кроме собственной частоты 0, требуется определить частоту этой силы по условию конкретной задачи. Дальнейшее решение может быть основано на формулах (61) - (65).
Колебания, подчиняющиеся уравнению или в другой записи х11 + ω02х = 0, называются малыми. Дело в том, что для пружинного маятника возвращающая сила пропорциональна смещению только в случае малых смещений (закон Гука), а для математического маятника мы предполагаем, что угол отклонения мал, а именно таков, что
sin α ≈ tg α ≈ α. (69)
Однако эти ограничения не умаляют значения и общности анализа. Оказывается, что в случае колебаний тел (физический маятник), когда в уравнении масса заменяется моментом инерции, а сила - моментом силы, подход остается тем же независимо от природы силы. Более того, колебания в электрических цепях, всегда обладающих электроемкостью и индуктивностью, также описываются этим уравнением.
Сложение колебаний
Проблема сложения колебаний весьма важна. Пусть тело (материальная точка) имеет возможность совершать колебания вдоль одного направления (колебания с одной степенью свободы). На это тело могут действовать периодические (гармонические) силы с одинаковыми или различными частотами, фазами, амплитудами. Возникает вопрос, каким образом будет двигаться тело, если под действием каждой из сил оно движется независимо. Такая же задача возникает и в случае движения тела в плоскости, в пространстве.
Все подобные задачи имеют важные приложения, например, в теории переходных процессов при установлении вынужденных колебаний, в теории волн, в частности при рассмотрении явлений интерференции и дифракции, в теории поляризации поперечных волн. Несколько волн, приходящих одновременно в заданную точку наблюдения, вызовут в ней колебания, которые будут складываться определенным образом, а мы всегда будем наблюдать лишь результат этого сложения. Наряду с задачей сложения колебаний актуальна задача разложения колебаний на составляющие. Так поляризатор всегда выделяет колебания заданного направления, а спектральный анализатор – колебания определенной частоты.
Итак, сложить колебания - значит сложить движения. Классическим вариантом такой задачи является задача о движении тела, брошенного под углом к горизонту (Физика 9, § 18). Считается, что тело участвует одновременно в двух независимых движениях: равномерном прямолинейном по горизонтали (ось х) и равнопеременном с ускорением g по вертикали (ось у). Изменение координат со временем задается выражениями:
x(t) = v0cos α0· t; y(t) = v0sin α0· t – 0,5gt2, (70)
где v0 – скорость, а α0 – угол бросания.
Исключаем время t из x(t) и подставляем в y(t). Получаем
y(x) = -  (1 + tg2α0)x2 + tgα0 · x. (71)
(1 + tg2α0)x2 + tgα0 · x. (71)
Таким образом, в данном случае сложение движений означает нахождение траектории точки на плоскости х,у.
Сложение гармонических колебаний одинаковой частоты совершаемых вдоль одного направления х:
х1 = А1 cos (ω1 t + α1); х2 = А2 cos (ω1 t + α2).
Результирующее колебание х = х 1 + х2 представим в виде
х = А cos (ω1 t + α)
А2 = А12 + А22 + 2А1 А2 cos(α1 - α2),
α – вспомогательный угол (см. ниже (73)).
Сложение колебаний разной частоты формально сводится к сложению одночастотных колебаний.
х1 = А1 cos (ω1 t + α1); х2 = А2 cos (ω2 t + α2).
х = А(t) cos ((А1 cos α1 + A2 cosy) + α(t))
с помощью преобразования w2 - w1 = W > 0, a2 + W t = y(t),
приводящего колебание х2 к виду х2 = А2 cos (ω1 t + y(t)).
Тогда амплитуда А(t) находится из выражения
А2(t) = А12 + А22 + 2А1 А2 cos(α1 - y(t)), (72)
Если разность фаз α остается постоянной во времени, то колебания называются когерентными.
При выводе этого соотношения использовано известное математическое тождество:
(А1 cos α1 + A2 cosy)cos ω1 t – (А1 cos α1 + A2 cosy) sin ω1 t =
А cos (ω1 t + а),
где вспомогательный угол а (в нашем случае зависящий от времени) однозначно находится из соотношений:
cos а = (А1 cos α1 + A2 cosy) /А,
sin а = (А1 sin α1 + A2 siny) /А. (73)
Если мы образуем из этих выражений tg а, то дополнительный угол не будет выражаться однозначно.
Полученные соотношения имеют простой геометрический смысл, что позволяет геометрически складывать одночастотные колебания на векторных диаграммах / 1/.
Сложение гармонических колебаний разных частот совершаемых вдоль одного направления х:
Особый интерес представляет случай, когда два складываемых гармонических колебания одинакового направления мало отличаются по частоте. Как мы сейчас покажем, результирующее движение при этих условиях можно рассматривать как гармоническое колебание с пульсирующей амплитудой. Такое колебание называется б и е н и я м и.
Обозначим частоту одного из колебаний буквой ω, частоту второго колебания через ω + Δ ω. По условию Δ ω ≤ ω. Амплитуды обоих колебаний будем полагать одинаковыми и равными а. Поскольку частоты колебаний несколько отличны, всегда можно выбрать начало отсчета времени так, чтобы начальные фазы обоих колебаний были равны нулю. Практически это означает, что мы должны дождаться, пока смещения в обоих колебаниях достигнут одновременно наибольшего положительного значения, и в этот момент «запустить секундомер». Тогда уравнения обоих

|
Рис. 16а. Биения и их переменная амплитуда
колебаний будут иметь следующий вид:
x1 = a cos ω t, x2 = a cos (ω + Δ ω) t.
Складывая эти два выражения и применяя тригонометрическую формулу для суммы косинусов, получаем:
х = x1+ x2 = (2 a cos ((Dw/2) t)) cos(w + Δ ω /2) t (74)
(если Δ ω < ω, то во втором множителе пренебрегаем членом Δ ω /2 по сравнению с ω). График функции (74) изображен на рис. 16а. График построен для ω/Δ ω =10. Фазовая траектория биений представлена на рис. 28.
Заключенный в скобки множитель в формуле (74) изменяется гораздо медленнее, чем второй множитель. Ввиду условия D ω < ω за то время, за которое множитель соs wt совершает несколько полных колебаний, множитель, стоящий в скобках, почти не изменится. Это дает нам основание рассматривать колебание (74) как гармоническое колебание частоты w, амплитуда которого изменяется по некоторому периодическому закону.
Такой подход является весьма продуктивным при изучении сложных колебаний, которые можно описать функцией
x(t) = А(t) cos (ω1 t + α1),
где А(t) - амплитудная функция изменяющаяся со временем гораздо медленнее, чем фаза.
Если складываются однонаправленные колебания разных частот и разных амплитуд, то можно поступить так, как указано в (72). Имеем
x(t) = x1 (t) + x2 (t) = А1 cos (ω1 t + α1) +А2 cos (ω2 t + α2) = А1 cos (ω1 t + α1) +А1 cos (ω2 t + α2)+ (A2 - А1)cos (ω2 t + α2) = 2 A1cos( )cos(
)cos( ) +
) +
+ (A2 - А1)cos (ω2 t + α2).
График этой функции представлен на рис. 16 б и является графиком биений. Рис. 16 а иногда называют графиком чистых биений.

|
Рис. 16 б. График биений – результат сложения колебаний с различными частотами, амплитудами и начальными фазами

Рис. 16 с. Векторная диаграмма сложения разночастотных колебаний
Можно дать геометрическую трактовку сложению разночастотных колебаний. Как следует из рис.16 с, вектор первого колебания строится по обычным правилам, а вектор второго колебания равномерно вращается вокруг конца первого с разностной частотой.
Задача 11.
Сложить два колебания одной частоты, совершаемые по одному направлению:
 ; x2(t) = 2 sin (ωt + 300);
; x2(t) = 2 sin (ωt + 300);
Решение.
Приводим колебания к одному виду описания, через синусы или через косинусы. Для примера, перейдем к косинусам в x2(t).
 ;
;  ;
;
 ; x2(t) = 2cos (ωt+
; x2(t) = 2cos (ωt+  -
-  ) = 2cos(ωt -
) = 2cos(ωt -  ).
).
Уберем знак минус перед амплитудой x1(t). Этого можно и не делать, достаточно повернуть вектор колебания на π:
x1 = 5 cos(ωt + π + ) = 5 cos (ωt +  ).
).
Сложим колебания, раскрывая скобки и собирая по отдельности члены, содержащие sin ωt и cos ωt:

Для проверки вычислим угол δ через синус и через косинус:
 ,
,  ,
,
2310,802 = (2310,802 /1800).π = 4,046 рад
Ответ: x = 5,38 cos(ωt + 4,046 ).
На рис. 17 представлена векторная диаграмма сложения указанных колебаний.
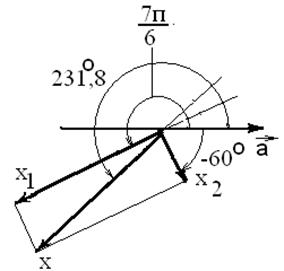
Рис. 17. Векторная диаграмма сложения двух одночастотных колебаний ( - произвольный вектор)
- произвольный вектор)
Сложение разнонаправленных колебаний. Сложить колебания, совершаемые по двум несовпадающим направлениям, это значит найти траекторию точки, совершающей эти колебания, в плоскости содержащей заданные направления. Задача решается аналогично нахождению траектории материальной точки брошенной под углом к горизонту (70,71).
Траектория точки, участвующей в двух взаимно перпендикулярных колебаниях, (x = А1coswt, y = A2 cos (wt + j) ),
всегда есть ограниченная линия (не уходящая на бесконечность):
a) у = (А2/А1) x (если разность фаз j = 0) – отрезок прямой.
b) у = - (А2/А1) x (если разность фаз j = ±p) – отрезок прямой.
c) x2/A12 + y2/A22 = 1 (если разность фаз j = ±p/2) – канонический эллипс.
d) x2/A12 + y2/A22 –(2xy/ А1 А2)cos(j2 -j1) = sin2(j2 - j1) – эллипс общего положения (75)
В общем случае выражения
х = А1cosw1t и у = А2cos(w2t +j)
задают ограниченную кривую (вписанную в прямоугольник 2А1 х 2А2) в параметрическом виде. Причем в случае рационального отношения частот w1 и w2 и сдвигов фаз колебаний траектории замкнуты и называются фигурами Лиссажу. При этом отношение частот w1/w2 равно отношению числа касаний фигуры Лиссажу с горизонтальной и вертикальной сторонами прямоугольника, в который они вписываются.
Если указанные отношения иррациональны, то траектория точки не замыкается, однако она остается внутри упомянутого прямоугольника.
Другие варианты сложения взаимно перпендикулярных колебаний различных частот представлены на рис. 18 и 19.
Направление обхода траектории всегда можно установить, рассмотрев смещение точки за малый промежуток времени Dt. В общем случае направление обхода можно установить, рассмотрев ориентацию вектора  , построенного по правилу
, построенного по правилу  (векторное произведение двух векторов), где,
(векторное произведение двух векторов), где,  ,
,  - радиус –вектор точки в момент времени t и ее скорость в этот же момент времени. Вектор всегда перпендику лярен плоскости x,y и если он направлен против оси z правой системы координат, то фигура обходится по часовой стрелке.
- радиус –вектор точки в момент времени t и ее скорость в этот же момент времени. Вектор всегда перпендику лярен плоскости x,y и если он направлен против оси z правой системы координат, то фигура обходится по часовой стрелке.
Сложение колебаний различных направлений сводится к сложению взаимно перпендикулярных колебаний.

 |

1 2
3 4
5 6
7 8
Рис. 19. Фигуры Лиссажу
1. - x = A cos(2ωt + φ), y = B cos(ωt); 2. - x = A cos(2ωt), y = B cos(ωt + φ); 3. - x = A sin(2ωt + φ), y = B sin(ωt); 4. - x = A sin(2ωt), y = B sin(ωt + φ); 5. - x = A cos(ωt), y = B cos(2ωt + φ); 6. - x = A cos(ωt + φ), y = B cos(2ωt); 7. - x = A sin(ωt), y = B sin(2ωt + φ);
8. - x = A sin(ωt + φ), y = B sin(2ωt), (А = 1, В = 4, φ = 1350)
Затухающие колебания
Анализ затухающих колебаний, обусловленных возвращающей силой пропорциональной смещению осциллятора от положения равновесия х и силой сопротивления пропорциональной скорости движения х1, проводим на основе уравнения
х11 + 2βх1 + ω02х = 0, (76)
где β – коэффициент затухания, ω0 – собственная частота осциллятора. Его решением является затухающая гармоника (рис.20)
x = A0e-βtsin(ωt + j0). (77)
Последнее решение справедливо при условии β << ω0 .
Задача 12
Пусть проводящая рамка в виде квадрата со стороной a подвешена в магнитном поле с индукцией B на нити, коэффициент упругости которой для кручения равен k. В начальный момент времени при равновесии вектор В скользит вдоль рамки. Сопротивление рамки R, момент инерции относительно оси О равен J, ее индуктивность ничтожно мала. Будучи выведенной из положения равновесия поворотом на угол φ, рамка совершает малые колебания вокруг вертикальной оси симметрии, проходящей через ее центр масс. Написать уравнение колебаний.
Решение.
При повороте рамки магнитный поток, пронизывающий ее, возрос до величины
Ф = ВS sin φ.
При этом в рамке возникает ЭДС Ɛи индукции и индукционный ток:
Ɛи = -  = - BS cos φ ·
= - BS cos φ ·  ; I = Ɛи /R.
; I = Ɛи /R.
Возникший индукционный ток порождает магнитный поток, направленный через контур рамки против  . Сила F, действующая на каждую из вертикальных сторон рамки, равна
. Сила F, действующая на каждую из вертикальных сторон рамки, равна
F = I a B sin α (α = 900).

Рис.20. Функция y = A e –bX sin (wx + j0) – график затухающего колебания
Точки пересечения с осями: В (0, Аsin φ0), С1, С2, С3...((kπ – φ0) /ω, 0). Точки касания асимптот с графиком: А1 , А2, А3, …: (((k + ½)p - j0)/w: (- 1)k A e-bX). Экстремумы: D1, D2, D3, …. при (k p - j0 - a)/w. Точки перегиба: Е1, Е2, Е3, … при (kp - j0 + 2a)/w, где tg α = ω/b
На горизонтальные стороны рамки силы не действуют.
Силы магнитного взаимодействия создают вращающий момент направленный против возрастания угла φ: М = 2 F h. Здесь h – плечо силы F. Из рис. h = (a/2) cos φ. Как видно из рисунка, этот момент возвращающий.
Направление индукционного тока определяем по правилу Ленца, а направление силы магнитного взаимодействия по правилу левой руки.
Кроме того, силы упругости, возникающие при закручивании нити (подвеса) на малый угол, создают свой возвращающий момент сил пропорциональный углу закрутки (рамки):
М1 = - kс φ (kс =  , Jр = 0,5 πr4, G =
, Jр = 0,5 πr4, G =  , Jр – момент инерции сечения подвеса в виде проволоки радиуса r, L - длина подвеса, G – модуль сдвига материала проволоки, Е – модуль Юнга и μ – коэффициент Пуассона, G» 0,4 Е, μ = 0 - 0,5).
, Jр – момент инерции сечения подвеса в виде проволоки радиуса r, L - длина подвеса, G – модуль сдвига материала проволоки, Е – модуль Юнга и μ – коэффициент Пуассона, G» 0,4 Е, μ = 0 - 0,5).
В приближении малых углов поворота имеем
Ф = В а2, Ɛи = -- B а2  , I = -
, I = -  .
.
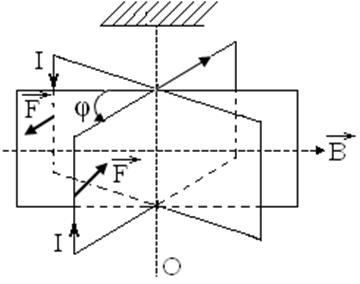
Рис. 21. Рамка, колеблющаяся в магнитном поле
Уравнение моментов для движения рамки представляется в виде
J φ11 +  φ1 + kc φ = 0,
φ1 + kc φ = 0,
(J – момент инерции рамки).
Оно легко приводится к стандартному виду при
2β =  , ω0 2 =
, ω0 2 =  .
.
Разумеется, колебания возникнут при ω0 > β.
Крутильные колебания
Крутильные колебания достаточно часто встречаются в природе и технике. Здесь мы продемонстрируем, как производится учет сил трения, приводящих к затуханию таких колебаний.
Произведем учет сил вязкости при крутильных колебаниях, которые обусловливаютсязатуханием колебаний. Сила вязкости, действующая на тело при его движении в газе, определяется по формуле: Fв = η. grad v.dS, grad v = dV/dх - градиент скорости при движении твердого тела в жидкости или газе, dS - площадь соприкосновения твердого тела с потоком газа, η – коэффициент вязкости. Условия обтекания твердых тел газами таковы, что на поверхности тел частицы жидкости имеют ту же линейную скорость, что и тела (эффект прилипания).
Решим конкретную задачу:
Диск A радиуса R, подвешенный на упругой нити между двумя неподвижными плоскостями, совершает крутильные колебания вокруг своей оси OO’. Момент инерции диска относительно этой оси J, зазор между диском и каждой из плоскостей h, причем h << R. Найти вязкость газа, окружающего диск A, если период колебания диска T, а логарифмический декремент затухания λ.
Выделим на диске кольцо площадью dS на расстоянии r от центра. Площадь этого кольца определяется по формуле
dS = π(r+dr)2 - πr2 = 2πrdr, (78)
в пренебрежении бесконечно малыми 2-го порядка, содержащими dr. Линейная скорость точек этого кольца
v = ω.r,
где ω - угловая скорость вращения диска радиуса R. Градиент скорости v на одной из сторон диска составит
grad v = dv/dх = v/h = ωr/h, (79)
т.к. при движении твердых тел в жидкости или газе имеет место «эффект прилипания», состоящий в том, что скорость жидкости на поверхности тела равна нулю.
Элемент силы вязкости действующий на рассматриваемое кольцо равен
dF = η. grad v.dS = η.(ωr/h) 2πrdr.
Элемент момента сил dF действующий на кольцо
dNв = dF.r = (2π ωr/ h) r2 dr.
Для того, чтобы найти полный момент сил вязкости действующий на диск, надо проинтегрировать по радиусу r.

 .
.
Это полный момент сил вязкости действующих на одну плоскость. Как видно, момент сил трения (вязкости) пропорционален угловой скорости колебаний. Обратимся к уравнению движения твердого тела в виде вращения вокруг неподвижной оси под действием момента сил трения (вязкости) и момента упругих сил kφ.
Jε =- Nb- Nучр= -bω - kφ,
где b = (πωηR4)/2h
Приведем уравнение колебаний к стандартному виду:
φ″ + 2βφ′ + ω20φ = 0,
2β = b/J; ω20 = k/J,
J – момент инерции колеблющегося диска. По условиям задачи с учетом 2-х поверхностей, между которыми колеблется диск. Имеем


 .
.
Энергетические соотношения Полная механическая энергия системы состоит из кинетической энергии колеблющейся материальной точки ЕК и потенциальной энергии деформированной пружины ЕП.
Е = ЕК + ЕП = 0,5 (kx2 + mv2).
Пусть x = A0e-βtcos(ωt + j0).
Введем обозначения (см. с. 171): sin α = ω /ω0, cos α = β /ω0, ω02 = k/m, ω 2 = ω 02 + β2.
Тогда v(t) = - A0ω0 e-βtcos(ωt + j0 - α).
E (t) = 0,5 (k A02 e-2βtcos2(ωt + j0) + m A02 ω 02 e-2βt cos2(ωt +
j0 - α)) = 0.5 k A02 e-2βt(0.5(1 + cos2(ωt + j0)+1+ cos2(ωt +
j0 - α))= 0.5 k A02 e-2βt(1+cos((2 ωt+2j0+2 ωt+2j0-2
α)/2)cos((2 ωt+2j0 -2 ωt-2j0 +2 α)/2)= 0.5k A02 e-2βt(1+cosα
cos(2ωt+2j0 -α))= 0.5k A02 e-2βt(1+(β/ω0) cos(2ωt+2j0 -α))
(80)
Зависимость E (t) представляет собой сумму экспоненты и затухающей гармоники.
Затухающие колебания в электрических цепях
Колебания в электрических цепях содержащих активное сопротивление (резистор) R, электроемкость С и индуктивность L также являются затухающими. Для вывода базового уравнения рассмотрим закон сохранения энергии. Работа источника тока (генератора) по перемещению электрических зарядов в цепи за время dt равна I Ɛ dt, где I - сила тока в цепи, Ɛ - напряжение на генераторе.
Эта работа переходит в тепло dQ выделяемое на резисторе и идет на изменение энергии электромагнитного поля dW. Количество выделившейся теплоты dQ = I2Rdt.
Электромагнитная энергия состоит из энергии накопленной в конденсаторе Wс = q2/2C и в индуктивности WL = LI2/2. Поэтому имеем:
I Ɛ dt = I2Rdt + dW, (81)
W =  ,
,  .
.
Учитывая, что I =  , имеем
, имеем
 Ɛ, (82)
Ɛ, (82)
что легко приводится к стандартному виду, если принять следующие обозначения:
2β =  , ω02 =
, ω02 =  , f =
, f =  .
.
Релаксационные колебания
Если затухание в системе велико β2 > ω02, то имеют место решения уравнения (76) в виде релаксационных (апериодических) движений (колебаний) (рис. 21).
x = C1exp(-β -  )t + C2 exp(-β + )t;
)t + C2 exp(-β + )t;
 ;
;  . (83)
. (83)
Если β2 = ω02, то решения исходного уравнения представимы в виде
x(t) = e-βt(x0 + (n0 + βx0)t). (84)
Это также релаксационные процессы. Здесь х0 и v0 – начальные смещение и скорость осциллятора. Показать, что решения (77) и (83) удовлетворяют дифференциальному уравнению (76) при указанных условиях, можно методом подстановки.

Рис. 21. Различные виды релаксационных движений (х0 – начальное смещение, t1 – момент времен, когда материальная точка проходит положение равновесия, tэ – момент времени, когда достигается максимальное отклонение от положения равновесия)

