




 |
Понятно, что для определения в пространстве любого объекта, прежде всего надо иметь в распоряжении систему координат. FEMAP и здесь берет значительную часть работы на себя. Едва запустившись, эта программа создает три системы координат: декартову, цилиндрическую и сферическую. Эти, создаваемые по умолчанию системы координат называются глобальными. Обратите внимание, что в нижнем левом углу графического окна показано направление осей глобальной декартовой системы координат. Обозначения, принятые для координат, показаны на рисунке. Запомните, что значения углов в FEMAP следует вводить в градусах.
NASTRAN в конечном счете все координаты пересчитывает для декартовой системы координат. Но нам с вами предоставлена возможность пользоваться такой системой, которая удобней для конкретной задачи. Так, если вы хотите построить модель кухонного стола, предпочтительна декартова система, если хотите изобразить стакан или кувшин – цилиндрическая, а если хотите рассчитать на прочность футбольный мяч, то проще всего воспользоваться сферической.
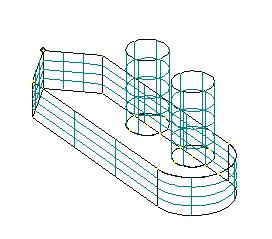 Кроме того вы можете дополнительно создать свои пользовательские локальные системы координат. Так, если вам потребуется изобразить такой кораблик с двумя трубами, то для описания его корпуса вполне можно обойтись декартовой системой координат. А вот для описания труб удобнее использовать цилиндрические системы с началом в центре основания каждой трубы. При задании таких вспомогательных систем необходимо определить положение и ориентацию осей такой вспомогательной системы по отношению к глобальной системе координат.
Кроме того вы можете дополнительно создать свои пользовательские локальные системы координат. Так, если вам потребуется изобразить такой кораблик с двумя трубами, то для описания его корпуса вполне можно обойтись декартовой системой координат. А вот для описания труб удобнее использовать цилиндрические системы с началом в центре основания каждой трубы. При задании таких вспомогательных систем необходимо определить положение и ориентацию осей такой вспомогательной системы по отношению к глобальной системе координат.
Для тренировки давайте создадим вспомогательную декартову систему координат, которая имеет начало в точке (40,10,‑20), ось Z направлена также как и соответствующая ось глобальной системы, а оси X и Y повернуты на 45°.
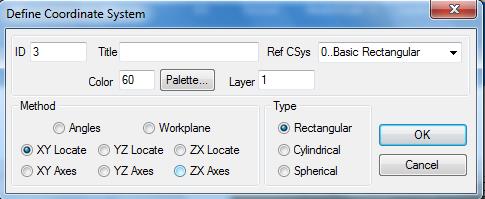
 Для выполнения этих действий FEMAP предлагает удобный и понятный интерфейс. Сначала командой Model – Coord Sys… вызывается окно определения системы координат (Define Coordinate System).
Для выполнения этих действий FEMAP предлагает удобный и понятный интерфейс. Сначала командой Model – Coord Sys… вызывается окно определения системы координат (Define Coordinate System).
В появившемся окне отметим, что предлагаемый номер для системы координат – 3. Предыдущие номера уже заняты глобальными системами: 0 – декартова, 1 – цилиндрическая, 2 – сферическая. Эти глобальные системы координат мы ни удалить, ни изменить не имеем возможности. В группе Type можно выбрать любой из трех возможных типов систем координат. В группе Method мы можем выбрать наиболее удобный способ задания положения и ориентации осей новой системы. Всего в вашем распоряжении 8 таких способов:
 |
Angles – с помощью трех поворотов исходной системы координат;
Workplane – рабочая плоскость используется как плоскость XY новой системы;
XY Locate – плоскость XY задается тремя точками;
YZ Locate – плоскость YZ задается тремя точками;
XZ Locate – плоскость XZ задается тремя точками;
XY Axes – оси X и Y задаются векторами;
YZ Axes – оси Y и Z задаются векторами;
ZX Axes – оси Z и X задаются векторами.
Какой из этих способов лучше? Универсального ответа на такой вопрос, как всегда, нет. Все зависит от того, в какой форме вы получаете данные, то есть от того чертежа, который вам представит заказчик расчета.
Мы рассмотрим здесь подробно метод XY Locate. В других методах последовательность окон, с помощью которых FEMAP вытягивает из вас нужную информацию, может несколько отличаться. Однако по названию окон можно догадаться, о чем вас спрашивают. В крайнем случае, всегда можно заглянуть в HELP.
 |
Первое окно, которое появится при выборе метода XY-Locate – окно определения начала системы координат (Define Coordinate System Origin). Заполняем его значениями координат начала. Эти координаты определяются в глобальной декартовой системе. Напоминание о том, какая система используется для определения положения этой точки, находится в окошке CSys.
После этого нас просят указать точку, лежащую на оси X определяемой системы (Define Location on CSys X-Axis).
 |
И, наконец, осталось указать точку, лежащую в плоскости XY (но не на оси X).
 |
Направление оси Z FEMAP определяет уже сам, так чтобы эта ось составляла с осями X и Y правую тройку.
Замечание. Когда автор сам был студентом, он никак не мог понять, в чем принципиальная разница между правой и левой системами координат, и все время забывал, как их различать. Как результат тридцатилетнего опыта даю следующие рекомендации:
1) разница между правой и левой системами состоит в том, что левую лучше всего вообще не применять, а обходиться правой;
2) поскольку не все еще знакомы с моим первым правилом, в некоторых книгах и на некоторых чертежах все еще можно встретить левую систему координат. Врага надо уметь узнавать в лицо. Вот простейший рецепт. Представьте, что ваш большой палец – это ось X, указательный – Y, а средний Z. Если вам удается, не выламывая пальцы правой руки расположить их так, чтобы они совпадали по направлению с нарисованной системой координат, то эта система правая. Если для этого удобнее использовать пальцы левой руки, то и система координат левая.
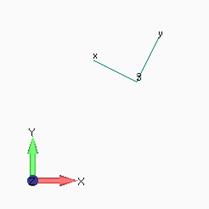 Вернемся, однако, к нашему FEMAP’у. После всех перечисленных выше действий в графическом окне появляется изображение созданной системы координат. (Если она не попадает в область видимости, выполните автомасштабирование – Ctrl-A).
Вернемся, однако, к нашему FEMAP’у. После всех перечисленных выше действий в графическом окне появляется изображение созданной системы координат. (Если она не попадает в область видимости, выполните автомасштабирование – Ctrl-A).

