




‘ункц≥ональна схема системи автоматичного регулюванн€ з≥ зворотним звТ€зком за швидк≥стю наведена на рис.21,а. Ќа н≥й позначен≥: «Ў Ц задавач швидкост≥, ѕќ Ц сумуючий операц≥йний п≥дсилювач: ¬ , — Ц керований випр€мл€ч системою керуванн€,
ƒ Ц двигун, “√ Ц тахогенератор ≥ под≥льник напруги  .
.
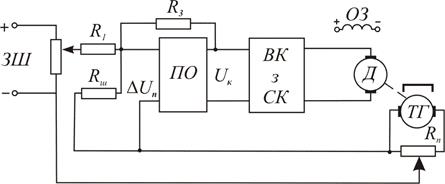
–ис.21,а.
ƒал≥ у по€снювальн≥й записц≥ необх≥дно навести схему ¬ (рис.17), схему фазо-≥мпульсного керуванн€ (рис.18), описати роботу системи автоматичного регулюванн€ швидкост≥ при зм≥н≥ задаючого сигналу ≥ зм≥н≥ навантаженн€, обчислити  керуючого перетворювача ≥ побудувати за р≥вн€нн€м /83/ електромехан≥чну характеристику двигуна (рис.16, пр€ма 1).
керуючого перетворювача ≥ побудувати за р≥вн€нн€м /83/ електромехан≥чну характеристику двигуна (рис.16, пр€ма 1).
ƒл€ розрахунку коеф≥ц≥Їнт≥в зворотних звТ€зк≥в записують систему р≥вн€нь виду /90/, повод€ть њњ розвТ€зок ≥ отримують р≥вн€нн€ електромехан≥чноњ характеристики в замкнен≥й систем≥ регулюванн€:
 , /94/
, /94/
де  коеф≥ц≥Їнт п≥дсиленн€ роз≥мкненоњ системи.
коеф≥ц≥Їнт п≥дсиленн€ роз≥мкненоњ системи.
ѕод≥ливши перепад швидкост≥ в роз≥мкнен≥й систем≥ при ном≥нальному навантаженн≥  на перепад швидкост≥ в замкнен≥й систем≥
на перепад швидкост≥ в замкнен≥й систем≥  , одержимо формулу дл€ визначенн€ необх≥дного коеф≥ц≥Їнта п≥дсиленн€ роз≥мкненоњ системи:
, одержимо формулу дл€ визначенн€ необх≥дного коеф≥ц≥Їнта п≥дсиленн€ роз≥мкненоњ системи:
 або
або  . /95/
. /95/
оеф≥ц≥Їнт зворотного звТ€зку за швидк≥стю визначають, виход€чи з стандартноњ задаючоњ напруги 10¬ або 20¬, €ка маЇ в≥дпов≥дати швидкост≥ ≥деального холостого ходу  . «азвичай, приймають
. «азвичай, приймають  . “од≥, п≥дставивши в /94/
. “од≥, п≥дставивши в /94/  , одержують
, одержують
 /96/
/96/
« /96/ визначають коеф≥ц≥Їнт зворотного звТ€зку
 /97/
/97/
оеф≥ц≥Їнт передач≥ керованого випр€мл€ча визначають з ун≥ф≥кованоњ характеристики  (рис.19), прийн€вши
(рис.19), прийн€вши  р≥вною ном≥нальн≥й напруз≥ двигуна ≥
р≥вною ном≥нальн≥й напруз≥ двигуна ≥  .
.
оеф≥ц≥Їнт передач≥ керованого випр€мл€ча вираховують ≥з умови роботи привода на м≥н≥мальн≥й швидкост≥. «а ц≥Їњ умови  ;
;  ≥
≥  зг≥дно граф≥ка в≥дпов≥даЇ
зг≥дно граф≥ка в≥дпов≥даЇ  . “од≥
. “од≥
 , /97, а/
, /97, а/
де  напруга керуванн€, €ка в≥дпов≥даЇ
напруга керуванн€, €ка в≥дпов≥даЇ  зг≥дно рис.19.
зг≥дно рис.19.
ƒл€ забезпеченн€ заданого статизму  необх≥дно вибирати сумуючий п≥дсилювач з коеф≥ц≥Їнтом п≥дсиленн€
необх≥дно вибирати сумуючий п≥дсилювач з коеф≥ц≥Їнтом п≥дсиленн€
 . /98/
. /98/
ƒл€ реал≥зац≥њ зворотного звТ€зку за швидк≥стю п≥дбирають за каталогом [Ћ.2, т.2, с.430, табл. 26.15] тахогенератор з пост≥йними магн≥тами за умов  ≥
≥  . “ехн≥чн≥ дан≥ тахогенератора виписуютьс€ з дов≥дника.
. “ехн≥чн≥ дан≥ тахогенератора виписуютьс€ з дов≥дника.
«азвичай, напруга тахогенератора б≥льша напруги давача  . “ому напругу одержують за допомогою под≥льника напруги тахогенератора. ќп≥р под≥льника
. “ому напругу одержують за допомогою под≥льника напруги тахогенератора. ќп≥р под≥льника
 /99/
/99/
де  струм €кор€ тахогенератора. ќп≥р под≥льника приймають дещо б≥льшим розрахункового, наприклад
струм €кор€ тахогенератора. ќп≥р под≥льника приймають дещо б≥льшим розрахункового, наприклад  . “од≥ оп≥р резистора
. “од≥ оп≥р резистора  ќп≥р резистора
ќп≥р резистора  .
.
ўоби струм у кол≥ зворотного звТ€зку не зумовлював нел≥н≥йн≥сть, б≥льшу 1%, оп≥р кола зворотного звТ€зку повинен бути б≥льшим за оп≥р в 25 раз≥в. ѕри такому опор≥ в кол≥ зворотного звТ€зку буде прот≥кати струм  . «а ц≥Їњ умови струм в резистор≥ под≥льника
. «а ц≥Їњ умови струм в резистор≥ под≥льника  .
.
ƒл€ вибору резистор≥в за каталогом необх≥дно визначити њх потужност≥ за формулою  .
.

