




Мы уже близки к достаточно полному ответу на вопрос, которым начали этот очерк: какая премудрость делает таким сложным управление этим с младенчества привычным нам двигательным аппаратом? Однако нельзя обойти молчанием еще одно осложнение (трудность номер три), создающее новые трудности для управления двигательным аппаратом нашего тела. Это — осложнение, зависящее от упругих свойств мышц.
В ближайшем очерке нам встретится случай рассказать в основных чертах о поперечнополосатой мышце как двигателе, там мы и рассмотрим более подробно ее свойства. Здесь же мы затронем их только вскользь, в той мере, в какой это необходимо для освещения стержневого вопроса всего настоящего очерка.

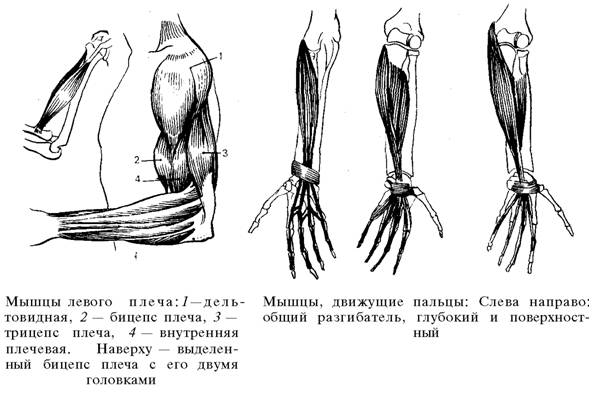
Мышцы нашего двигательного аппарата, может быть, в большей мере, чем какие бы то ни было другие образования тела, заслуживают названия ткани, присвоенного им на научном языке. Действительно, мышечная ткань, как и подобает ткани, вся состоит из тонких нитей (так называемых мышечных волокон); только эти нити в ней не переплетены между собой[12], а лежат параллельными пучками, как хорошо расчесанные волосы. Тончайшие ниточки скелетной поперечнополосатой мышцы, не превосходящие в толщину женского волоса, упруго‑растяжимы, как резиновые. Каждая из этих нитей обладает способностью сокращаться при действии на нее со стороны нерва, т. е. становиться в течение этого действия короче (процентов на 20 — 30) и туже, неподатливее к растяжениям. Между отдельными мышечными волокнами есть некоторые различия, но во всяком случае они невелики, не больше, чем между разными резиновыми трубками: потолще или потоньше, потуже или послабее, и только. Из наборов сотен таких параллельно лежащих волокон и состоит все наши скелетные мышцы; каждое волокно в них — крохотный элементарный двигатель. Цельную крупную мышцу вроде, например, бицепса руки можно рассматривать поэтому как своего рода многоцилиндровый агрегат с параллельно включенными цилиндрами. Все вообще, чем располагает наш организм для своих активных телодвижений и для совершения работы, — это только эти своеобразно упругие сократимые нити, взятые с сомножителями во многие сотни и тысячи и оснащающие со всех сторон все подвижные пункты тела.
Казалось бы, не может играть особо существенной роли то, как именно устроен двигатель, приводящий в действие тот или иной механизм или станок. Если он дает ту мощность и ту быстроту, какая предписывается техническими условиями, то дальше для успешной работы механизма довольно безразлично, движет ли его нефтяной, паровой, бензиновый или электрический двигатель. Оказывается, это не так, и своеобразие мышечного волокна как универсального двигателя нашего тела настолько велико, что нельзя пройти мимо него, не приняв в расчет его важных последствий. Вся трудность использования поперечнополосатого мышечного волокна в качестве двигателя состоит в том, что он приводит кости в движение посредством тяги (мышечные волокна не способны толкать вследствие своей мягкости), но тяга эта не жесткая и точная, а упругая.
То, что мышечные волокна могут работать только в одну сторону, только тянуть, но не толкать, — это еще не беда. Если снова обратиться за примерами к технике, то, скажем, в автомобильных двигателях каждый из цилиндров тоже может работать только в одном из направлений: его шатун может толкать колено вала под действием взрывных газов и не может тянуть его. В машинах этот недочет покрывается тем, что в ряд ставится по меньшей мере два цилиндра: когда один толкает, в другом шатун возвращается обратно на холостом ходу. Так же организовано и обслуживание суставов нашего тела: каждое из направлений их подвижности (то, что мы уже усвоили называть «степенями свободы») обеспечено парой мышц взаимно‑противоположного действия, так называемыми мышцами‑антагонистами. Таковы, например, сгибатель и разгибатель локтевого сустава или сгибатели и разгибатели пальцев руки. Когда одна из этих мышц тянет кость в свою сторону, вторая пассивно растягивается, чтобы затем, в свою очередь, начать двигать сустав в обратном направлении. Осложнение состоит совсем в другом: в упругой податливости мышечной тяги.
Представим себе, например, что у автомобильного двигателя шатуны его цилиндров заменены упруго сжимаемыми телами, например спиральными пружинами. Тогда движения коленчатого вала, вместо того чтобы строго и точно следовать за движениями цилиндровых поршней, окажутся зависящими от множества разнообразных причин. Идет машина под гору — пружинный шатун легко и быстро проворачивает вал и почти не сжимается при этом; идет она, напротив, в гору — и поршень, нажимая сверху с прежней силой, совсем не может сдвинуть с места вал, так что вся его работа уходит на сплющивание упругого шатуна.

Вязкая грязь или асфальт, попутный или лобовой ветер и т. д. — все это будет передаваться через колеса коленчатому валу мотора, и этот последний будет выделывать с нижними концами шатунов все, что вздумается, в то время как их верхушки будут независимо ни от чего отбивать себе такт мотора, бегая вместе с поршнями вниз и вверх. Быть может, части наших читательниц будет ближе другой пример. Предположим, что в их швейной машине продольный вал, начинающийся от махового колеса и тянущийся в стволе машины влево до той коробки, в которой его вращение превращается в подъемы и опускания иголки, что этот ведущий вал заменен резиновой палкой. Пока сшиваемая ткань тонка и мягка, разница, быть может, и не почувствуется, но вот работница взялась сшивать два куска драпа или части плотного одеяла. Игла завязла в материи с первого же стежка и не идет ни вниз, ни вверх, в то время как рука продолжает крутить колесо, почти не ощутив этого. Но вот работающая заметила, что машина не шьет, и вынула из нее драп — и вдруг вал, закрутившийся перед этим на несколько оборотов, как заведенная пружина, начинается раскручиваться сам собою, и иголка движется вниз и вверх на пустом ходу, хотя рука и не вертит рукояти. Оставим хозяйку, проколовшую себе от неожиданности палец, смазывать его йодом и проклинать неразумное устройство своей машины, и рассмотрим один совсем уже простой опыт. Пристегнем к поясу стержень с грузом на конце, как показано на рисунке. Подвесим его свободный конец на два резиновых жгута, каждый из которых возьмем в одну руку, и попробуем таким способом проделать концом стержня те или другие точные движения: например изобразить в воздухе квадрат или написать свои инициалы. Мы тотчас же обнаружим, как это трудно, как неточны движения конца стержня и как непокорно он себя ведет. Закроем в придачу глаза, и пусть другой человек даст отзыв о том, как мы управляемся с движениями стержня без контроля зрения. Не приходится и подчеркивать, что двигательный результат получится самым плачевным, мало чем отличающимся от телодвижений больного‑табетика, о котором была речь немного выше. Утешим себя тем, что зато научный результат нашего опыта оказался вполне удачным.
Как видно из сказанного и продемонстрированного на примерах, управление движениями посредством упругих тяг представляет очень большие трудности — именно потому, что при таком устройстве двигательный результат будет зависеть не только от того, как вели себя тяги, но и от множества побочных, неподвластных нам причин. Можно десять раз подряд совершенно одинаково дергать за эти тяги и при этом получить десять ни в чем не сходных между собой движений стержня. Управление подобной системой оказывается возможным только при посредстве непрерывного контроля какого‑либо «органа чувств», да и то сначала требует порядочной ловкости. Мы снова возвращаемся к тому же самому принципу, который в свое время позволил природе преодолевать избыток степеней свободы подвижности и даже проявить по отношению к их количеству высокую щедрость. Это — принцип контроля над движением при помощи чувствительной сигнализации: спасительный принцип, который выручает и на этот раз.
Можно, пожалуй, сказать, что рассмотренное сейчас третье осложнение, зависящее от упругой податливости тяг, по своему существу очень близко к предыдущему. Если при одинаковых потягиваниях могут в разных случаях получаться различные движения, это значит, что двигаемый стержень не обладает вынужденным движением, т. е. имеет избыточные степени свободы. Только в данном случае придется для различения обозначить эти особые степени свободы как динамические, зависящие уже не от свойств подвижности органа, а от особенностей его силового обслуживания («динамика» — учение о силах). Разумеется, если выход из положения в принципе найден, то уже не составляет большой разницы, преодолевать ли сотню кинематических степеней свободы («кинематика» — учение о подвижности) или приплюсовать к ним еще полсотни динамических степеней свободы на придачу.

