




Техническая система называется локальной, если она состоит из небольшого числа m элементов, m£4-5. Такие системы достаточно часто встречаются на практике, поэтому приведем ряд примеров расчета локальных систем, элементы которых подчиняются экспоненциальному распределению.
Расчет надежности системы с двумя нагруженными элементами
В этой системе всего два элемента (рис. 3.24) с интенсивностями отказов l1 и l2.

Рис. 3.24 – К расчету надежности резервированной системы с двумя элементами
Определим Рс(t)=1-(1-P1(t))×(1-P2(t))= P1(t)+ P2(t) - P1(t)×P2(t)
Структурная надежностная схема системы с двумя нагруженными элементами будет часто встречаться при расчете более сложных систем, поэтому выделим (и запомним) полученную "рабочую" формулу
Рс= P1+ P2 - P1×P2
Так как Pi(t)=exp{-lit}, i=1, 2, то
Рс(t)=  .
.
Для равнонадежных элементов с l1=l2=l
Рс(t) = 2P(t) – P2(t)= 2×е-lt - е-2lt
Хотя оба элемента системы подчиняются экспоненциальному распределению, но система в целом не подчинена экспоненциальному закону. Поэтому определим tHc по известному правилу
 Сравним выражения А и Б и запомним:
Сравним выражения А и Б и запомним:  .
.
Знание этого соотношения позволяет опускать тривиальные выкладки типа С, Д и сразу переходить от А к Б. Например, для равнонадежных элементов с интенсивностью отказа l получаем

т.е. введение одного резервного элемента с l=tH увеличило среднюю наработку системы в 1,5 раза (см. табл. 4)
Приведем другие характеристики надежности системы с m=2.


Для равнонадежных элементов имеем
fc(t)=2×l×e-lt - 2×l×e-2lt

Для системы из равнонадежных элементов можно вычислить гамма-ресурс tg. Для этого достаточно задать l и Рg и решить трансцендентное уравнение 2×e-lt - 2×e-2lt =  относительно переменной t.
относительно переменной t.
Расчет надежности системы с тремя нагруженными элементами
В системе имеется три элемента с интенсивностями l1, l2, l3 (рис. 3.25)
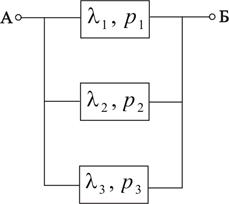
Рис. 3.25 - К расчету надежности резервированной системы из трех элементов
Определение Рс(t) и tНс проведем в два этапа.
На первом этапе "забудем" про элемент с l3 и получим структурную надежностную схему из двух элементов (рис. 3.26). Но для этой схемы мы помним формулу Рс=Р1+Р2-Р1Р2. Переобозначим Рс = РсI = Р1 + Р2-Р1Р2.
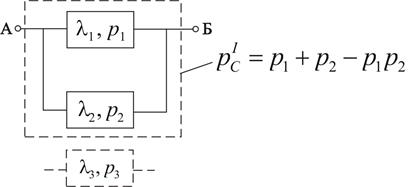
Рис. 3.26 – Структурная надежностная схема для первого этапа расчета надежности системы из трех элементов
На втором этапе примем найденное РсI за функцию надежности условного элемента нарисуем новую надежностную схему (рис. 3.27), в которую вставим "забытый" элемент с l3 или Р3. Но и для этой схемы мы помним формулу для расчета Рс:
Рс(t)= РсI +Pз- РсI Pз = P 1+P2-P1P2+P3-P1P3- P2P3+ P1P2P3
Или, после подстановки Pi=e-lit, i=1, 2, 3.


Рис. 3.27 - Структурная надежностная схема для второго этапа расчета надежности системы из трех элементов
Средняя наработка на отказ системы


Для системы из трех равнонадежных элементов имеем
Рс(t)=3×е-lt - 3×е-2lt + е-3lt
fс(t)=3×l×е-lt - 6×l×е-2lt + 3×l×е-3lt


При определении Рс(t) можно использовать и основную формулу для расчета вероятности
Рс(t)=1-(1-P1(t))×(1-P2(t)×(1-P3(t))= P1+P2-P1P2+P3-P1P3- P2P3+ P1P2P3
Расчет надежности системы с групповым нагруженным резервом
Нагруженная система имеет два основных элемента с интенсивностями отказов l1 и l2 и два резервных элемента с интенсивностями l3 и l4 (рис. 3.28).

Рис. 3.28 – Структурная надежностная схема системы с групповым резервом
Введем Pi(t)=e-lit, i=1, 2, 3, 4.
Для определения Рс(t) объединим пару последовательно включенных элементов с l1, l2 в новый элемент I с РI(t)= Р1(t)×Р2(t) (рис. 3.29).

Рис. 3.29 – Преобразованная структурная схема системы с групповым резервом
Аналогично определим элемент II с РII(t)= Р3(t)×Р4(t).
Имеем новую схему (рис. 3.29), для которой мы помним формулу Рс(t)=PI(t)+PII(t)-PI(t)PII(t) или Рс(t)=P1P2+P3P4 - P1P2P3P4= = 
Средняя наработка на отказ системы с групповым резервом


Все формулы заметно упрощаются, если l1=l2=l3=l4=l:
Рс(t)=2×е-2lt - е-4lt
fс(t)=4×l×е-2lt - 4×l×е-4lt


Расчет надежности системы с индивидуальным резервом
В состав системы входят два основных элемента с интенсивностями l1, l2 и два резервных с l3, l4, причем каждый резервный отдельно дублирует основной элемент (рис. 3.30)

Рис. 3.30 – Структурная надежностная схема системы с индивидуальным резервом
Эту схему можно изобразить проще, если объединить “внутренние” линии в одну линию СД.
Введем Pi=e-lit, i=1, 2, 3, 4 и для удобства изложения назовем линию СД – “перемычкой” (рис. 3.31).

Рис. 3.31 – Структурная надежностная схема системы с индивидуальным резервом и “перемычкой” СД
Система на рис. 3.31 отличается от схемы на рис. 3.28 только наличием этой перемычки, однако это заметно меняет процедуру расчета и влияет на надежность избыточной системы.
Разделим систему на рис. 3.30 на две подсистемы с номерами I и II (см. пунктирные границы на рис. 3.30) и изобразим их структурные схемы на рис. 3.32.

Рис. 3.32 – Декомпозиция структурной надежностной схемы системы с индивидуальным резервом на две подсистемы
Известна формула для определения РсI и РсII для подсистем I и II:
РсI(t)=P1+P3 - P1P3 РсII(t)=P2+P4 - P2P4
Получаем новую систему из двух последовательно включенных подсистем РсI и РсII (рис. 3.33).

Рис. 3.33 – Структурная надежностная схема последовательного
соединения двух подсистем
Для системы на рис. 3.33 легко определяется Рс(t) и tНс.
Рс(t)=РсI(t)×РсII(t)=(P1+P3 - P1P3)×(P2+P4 - P2P4)= P1P2+ P1P4+ P2P3+P3P4 - P1P2P3 - P1P2P4 - P1P3P4 - P2P3P4 + P1P2P3P4
или
Рс(t)= 

Все формулы заметно упрощаются для случая равнонадежных элементов с интенсивностью отказов l:
Рс(t)=4Р2 – 4Р3 + Р4=4×е-2lt - 4×е-3lt + е-4lt

Анализ эффективности систем с групповым и индивидуальным резервом
Нагруженные системы с групповым и индивидуальным резервом внешне очень похожи – в них по 4 одинаковых (в смысле l) элемента, все различие заключается в отсутствии "перемычки" в первой системе. Однако в смысле надежности, система с индивидуальным резервом явно "лучше" системы с групповым резервом:
tНсгр=0,75 tH tНсинд=0,916 tH
Можно ввести критерий эффективности систем

Показатель надежности системы tНс с индивидуальным равнонадежным резервом увеличивается на 22% за счет введения абсолютно надежной "перемычки". Можно показать, что  и
и  всегда больше единицы и при любых интенсивностях l1, l2, l3, l4.
всегда больше единицы и при любых интенсивностях l1, l2, l3, l4.
Нарисуем снова обе схемы резервирования и пронумеруем их элементы (рис. 3.34)

Система работоспособна Система работоспособна
если исправны элементы если исправны элементы
I 1 2 3 4 I 1 2 3 4
II 1 2 II 1 2
III 3 4 III 3 4
IV 1 4
V 2 3
Рис. 3.34 – Анализ эффективности группового и индивидуального резервирования: tНсгр=0,75 tH, tНсинд=0,916 tH
Варианты I, II, III совпадают у обоих систем. Но система с индивидуальным резервом имеет еще два дополнительных варианта работоспособности IV и V!. Значит она всегда, при любых сочетаниях интенсивностей l1, l2, l3, l4, более надежна, чем система с групповым резервом. Это утверждение справедливо при любом числе резервируемых элементов в обеих схемах.
Так, например, для системы из трех основных и трех резервных равнонадежных элементов (рис. 3.35) получаем

Рис. 3.35 – К расчету надежности системы из шести равнонадежных элементов с групповым и индивидуальным резервом
Рс(t)=2Р3 – Р6 Рс(t)=(2Р – Р2)3= 8Р3 – 12Р4 + 6Р5 – Р6


Показатель эффективности 
отчетливо показывает преимущество индивидуального резервирования. Отметим, однако, что стоимость системы с индивидуальным резервом всегда выше стоимости системы с групповым резервом.
Расчет надежности мостиковой схемы
Рассмотренные выше достоинства системы с индивидуальным резервированием базировались на допущении об абсолютно надежной "перемычке" СД между двумя цепочками элементов (рис. 3.36 а).

Рис. 3.36 – Структурные надежностные схемы мостикового соединения
На практике "перемычка" может иметь отказы типа "обрыв", интенсивность которых lп соизмерима с l элементов. При учете lп структурная надежностная схема системы принимает вид показанный на рис. 3.36 б.
Такая схема получила название мостиковой. Для расчета показателей надежности мостиковой схемы Рс и tНс первоначально положим l1=l2=l3=l4=lп=l, а элементам присвоим номера с 1 по 5 (см. рис. 3.37)

Рис. 3.37 – Структурная надежностная схема мостикового соединения равнонадежных элементов с ненадежной перемычкой
Напомним, что система работоспособна, если существует цепь АБ. Выпишем возможные состояния работоспособности и варианты:
Таблица 5
Состояния работоспособности и отказа мостиковой схемы
| NN состояния | Число элементов схемы | Состояние системы | Число вариантов состояния | Вероятность возникновения состояния | |
| исправных | отказавших | ||||
| I II III IV V | Работоспособное Работоспособное Работоспособное Работоспособное Отказ | 
|
Вероятности возникновения состояний I-IV:
РI=Р×P×P×P×P= Р5
РII=5×Р×P×P×P×Q=5×Р4 ×(1-P)=5×P4-5×P5
РIII=8×P×P×P×Q×Q=8×Р3×Q2 =8×Р3×(1-P)2=8×P3 - 16×P4 - 8×P5
РIV=2×P×P×Q×Q×Q=2×Р2×Q3 =2×Р2×(1-P)3=2×P2 + 6×P4 - 6×P3 - 2×P5
где Р(t)= е-lt, Q=1-P.
Работоспособная система находится в одном из четырех состояний I, II, III, IV с вероятностями РI, PII, PIII, PIV тогда:
Рс(t)= РI + РII + РIII + РIV = 2Р5 – 5Р4 + 2Р3 + 2Р2
Далее находим

Показатель эффективности резервирования

Итак, средняя наработка на отказ мостиковой схемы на 12,5% ниже аналогичного показателя для схемы с индивидуальным резервом.
Допущение о равнонадежности всех элементов схемы и "перемычки" весьма жесткое. Если считать равнонадежными только элементы с интенсивностью l, а "перемычку" характеризовать интенсивностью отказа lп, то получим более сложные формулы для расчета Рс и tНс.
Рс(t)= Р4×Pп + 4×Р3 ×Pп (1-P) + Р4 (1-Pп) + 4×Р3 (1-P)× (1-Pп) + 4Р2 Pп (1-P)2 + 2×Р2 (1-P)2× (1-Pп) =
= 2Р2 + 2Р2×Pп – 4Р3×Pп + 2Р4 ×Pп - Р4 = 2e-2lt + 2e-(2l+2lп)t - 4e-(3l+2lп)t + 2e-(4l+lп)t - e-4lt

При lп=0 имеем схему с индивидуальным резервом и  . При lп®¥ мостиковая схема превращается в схему с групповым резервом и
. При lп®¥ мостиковая схема превращается в схему с групповым резервом и  . Наконец, при lп=l получаем мостиковую схему из равнонадежных элементов с tHc=0,816tH
. Наконец, при lп=l получаем мостиковую схему из равнонадежных элементов с tHc=0,816tH
Анализ эффективности резервирования системы с отказами разного вида
Многие электротехнические элементы ТСА подвержены действию отказов типа "обрыв" (О) и "короткое замыкание" (КЗ). Отказ "обрыв" выводит из строя сам элемент и всю цепочку последовательно соединенных элементов (рис. 3.38).

Рис. 3.38 – К понятию отказа типа “обрыв”
Отказ типа КЗ также выводит из строя (шунтирует) отказавший элемент и все параллельно включенные другие элементы (рис. 3.39).

Рис. 3.39 – К понятию отказа типа “короткое замыкание”
Один и тот же элемент может находится в одном из трех состояний:
работоспособности (с вероятностью P(t))
отказа типа "обрыв" (с вероятностью Q0(t))
отказа типа КЗ (с вероятностью Qкз(t))
Эти случайные события независимы, несовместны и образуют полную группу событий:
P(t) + Q0(t) + Qкз(t) = 1
Для повышения надежности элемента 1 с отказами "обрыв" и КЗ применяют нагруженное резервирование с использованием равнонадежных элементов 1 и 2 (рис. 3.40).

Рис. 3.40 – Структурная надежностная схема резервированной системы с отказами элементов типа КЗ и “обрыв”
Задача анализа такой системы заключается в определении вероятности безотказной работы системы Pс(t), Qc(t), tHc по известным P(t), Q0(t), Qкз(t) элементов и нахождении условий эффективности резервирования.
Состояния работоспособности резервированной системы:
I – исправны элементы 1 и 2;
II – исправен элемент 1 и отказал элемент 2 ("обрыв");
III – исправен элемент 2 и отказал элемент 1 ("обрыв");
Для работоспособного состояния системы можно определить
Pc(t) = P(t)×P(t) + P(t)×Q0(t) + P(t)×Q0(t) = P2(t) + 2×P(t)×Q0(t)
Хотя Qкз(t) явно не входит в эту формулу, но отказы КЗ косвенно влияют на надежность системы. Действительно, определив Q0(t) = 1- P(t) - Qкз(t), получим
Рс(t)= 2Р(t) – Р2(t) - 2Р(t)×Qкз(t)
Qс(t)= 1 - 2Р(t) + Р2(t) + 2Р(t)×Qкз(t)
Средняя наработка до отказа находится по обычной формуле

Для оценки эффективности резервирования можно использовать критерий
Qp(t)=Pc(t)/ P(t)
и очевидное условие:
Qp>1 или Pc(t)> P(t)
Подставляя сюда Рс=Р2+2РQ0, получим
Р2+2РQ0³P(t)
или: Р+2Q0>1.
После подстановки Q0(t) = 1- P(t) - Qкз(t) получаем окончательно:
Q0(t) > Qкз(t)
Итак, резервированная система становится эффективной, если у ее элементов отказы "обрыв" происходят чаще, чем отказы типа "короткое замыкание". Следует указать, что применительно к техническим средствам автоматизации частота отказов типа "обрыв" значительно (в 3-4 раза) превышает частоту отказов КЗ.
Для исключения индивидуального влияния на надежность системы отказа элемента типа "обрыв" элементы должны быть соединены параллельно, а для отказа типа КЗ – последовательно. Для исключения одновременного влияния отказов типа "обрыв" и КЗ на надежность системы, необходимо применять параллельно-последовательное соединение элементов (рис. 3.41)

Рис. 3.41 – Структурная надежностная схема параллельно-последовательного соединения элементов с отказами типа “обрыв” и КЗ
Пусть в каждой цепочке будет k равнонадежных элементов с P(t), Q0(t), Qкз(t), а число самих цепочек равно m. Полагаем, что при КЗ в одной из цепочек отказ типа "обрыв" уже не происходит, и наоборот, при "обрыве" элемента КЗ в цепочке не происходит. Кроме того, отказы "обрыв" и КЗ не влияют на показатели надежности работающих элементов.
При указанных условиях вероятность безотказной работы системы (рис. 3.41) равна:
Pc(t)=[ 1-Qкзk(t)]m - { 1-(1-Q0(t))k}m
Средняя наработка до отказа
Применение параллельно-последовательного соединения равнонадежных элементов с отказами КЗ и "обрыв" эффективно (в смысле Qр=Pc(t)/Pэлем>1) при условии
Qкз+(1-Qкзk)m>(1-Q0)+{ 1-(1-Q0)k}m
Расчет надежности мажоритарных систем
Во многих системах технологической сигнализации, диагностики и защиты оборудования применяют так называемые мажоритарные схемы, представляющие из себя резервированные системы с нечетным числом элементов. Такая система считается работоспособной, если исправна большая часть элементов, под отказом мажоритарной системы понимается событие, когда выйдут из строя более половины элементов.
Рассмотрим функциональную схему мажоритарной системы из N=2m+1 “голосующих” элементов (где m=1, 2, 3, … и тд.) и так называемого кворум – реле (КР), выходной сигнал которого Хб в точке Б равен единице при исправном состоянии m+1 и более элементов и равен нулю в противном случае (рис. 3.42)

Рис. 3.42 – Функциональная схема мажоритарной системы
Для упрощения задачи анализа мажоритарной системы будем считать все элементы равнонадежными с вероятностями Р(t) и интенсивностями отказов l, а надежность кворум – реле опишем распределением Ркр(t). Требуется определить вероятность безотказной работы системы Рс(t) и среднюю наработку до отказа при любом числе резервных элементов 2m+1.
Представим мажоритарную систему в виде двух основных блоков I и II, в один из которых входят 2m+1 элемента, во второй – КР (рис. 3.43)
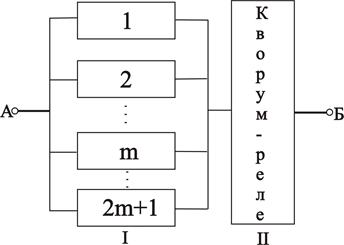
Рис. 3.43 – Блочная схема мажоритарной системы
Структурная надежностная схема мажоритарной системы в блочном варианте имеет вид (рис. 3.44), а вероятность Рс равна
Рс(t)=PI(t)×PII(t),
где PI(t) характеризует надежность резервированного блока I, а PII(t) = Pкр(t), здесь Pкр – известное распределение, например, экспоненциальное с параметром lкр.

Рис. 3.44 – Структурная надежностная схема блочной мажоритарной системы
Определим вероятность PI(t) при известных P(t)=exp{-lt} и заданном нечетном N. Пусть m=1 и тогда N=3.
Выпишем состояния работоспособности блока I и вероятности их возникновения и поместим их в табл. 6.
Таблица 6
Состояния работоспособности и отказа мажоритарной системы из 3 элементов
| NN состояния | Число элементов блока I | Состояние системы | Число вариантов состояния | Вероятность возникновения состояния | |
| Исправных | отказавших | ||||
| I II III | Работоспособное Работоспособное Неработоспособное | 
|
Тогда
РI(t)=Р×P×P+3РРQ= Р3 + 3P2(1-P)=P3+3P2 - 3P3=3P2 – 2P3
где Q=1-P,

Для всей мажоритарной системы:
Рc(t)= РI(t)×РII(t)= 3Р2×Pкр – 2Р3×Pкр = 3e-(2l+lкр)t - 2e-(3l+lкр)t

При lкр=l получим Рс=3e-3lt – 2e-4lt; 
Пусть m=2 и N=5. Найдем состояния работоспособности блока I и соответствующие им вероятности и поместим их в табл.7.
Таблица 7
Состояния работоспособности и отказа мажоритарной системы
из 5 элементов
| NN состоя-ния | Число элементов блока I | Состояние системы | Число вариантов состояния | Вероятность возникновения состояния | |
| Исправных | Отказавших | ||||
| I II III IV | Работоспособное Работоспособное Работоспособное Неработоспособное | 
|
Вероятность работоспособного состояния блока
РI(t)=Р×P×P×P×P +5 P×P P×P Q + 10 P×P×P×Q×Q = Р5 + 5P4(1-P) + 10P3(1-P)2 =6P5 - 15P4 + 10P3
Средняя наработка до отказа резервированного блока 1:

Для всей мажоритарной системы:
Рc(t)= РI(t)×РII(t)= 6Р5×Pкр – 15Р4×Pкр + 10Р3×Pкр

Если Pкр = exp {-lt}, то
Рc(t)= РI(t)×РII(t)= 6Р6 – 15Р5 + 10Р4

Наконец, пусть имеем произвольное натуральное число m и N=2m+1, m=1,2,3… Состояния работоспособности и отказа для такой системы приведены в табл.8.
Таблица 8
Состояния работоспособности и отказа мажоритарной системы из N=2m+1 элементов
| NN состояния | Число элементов блока I | Состояние системы | Число вариантов состояния | Вероятность возникновения состояния | |
| Исправных | отказавших | ||||
| I II III i+1 m | N N-1 N-2 N-i m | i<m+1 N-m | Работоспособное Работоспособное Работоспособное Работоспособное Работоспособное | 
| 
|
здесь СiN – число сочетаний из N по i;  , 0!=1, 1!=1.
, 0!=1, 1!=1.
Вероятность безотказной работы резервированного блока I равна
РI(t)=РN + N PN-1×Q + … + CiN×PN-i×Qi + … +CmN×Рm×QN-m

Для всей мажоритарной системы
Pc(t)=PI(t)×РII(t)=РN×Pкр + N PN-1×Q×Pкр + … + CiN×PN-i×Qi×Pкр + … +CmN×Рm×QN-m×Pкр
Если все элементы и КР равнонадежны и lкв=l, то получим
Pc(t)=PI(t)×РII(t)=РN+1 + N PN×(1-Р) + … + CiN×PN-i+1×(1-Р)i + … +CmN×Рm+1×(1-Р)N-m
При анализе надежности мажоритарных систем возникает вопрос эффективности резервирования одного элемента несколькими элементами. Для ответа на этот вопрос рассмотрим одну простую и три мажоритарных системы S1, S3, S5 и S7, состоящие из одного, трех, пяти и семи равнонадежных элементов с интенсивностью отказов l и вероятностью безотказной работы Р(t) (см табл. 9).
Обозначим характеристики надежности каждой системы: Pc1, tH1; Pc3, tH3; Pc5, tH5, Pс7, tн7.
Вычислим эти показатели и поместим их в табл. 9
Таблица 9
Характеристики надежности мажоритарных систем с N= 1, 3, 5, 7 элементов
| Число | N=1 | N=3 | N=5 | N=7 |
| Надежностные схемы | 
| 
| 
| 
|
| Характеристики надежности | 
| 
| 
| 
|
Из анализа зависимости tHc(N) следует, что средняя наработка до отказа мажоритарной системы снижается примерно на 8,8% при возрастании числа элементов с 3 до 7. Чем больше элементов в мажоритарной системе, тем ниже ее надежность?
Прежде чем ответить на этот вопрос, рассмотрим поведение другого показателя надежности систем – Рс(t).
Введем показатель эффективности резервирования
 , g=3, 5, 7
, g=3, 5, 7
Понятно, что: резервирование эффективно (в смысле повышения надежности) при Вg(t)>1,
резервирование неэффективно (понижает надежность) при Вg(t)<1,
резервирование не влияет на надежность системы при Вg(t)º1 или Вg(t)=1 (хотя существенно (в 3, 5, 7 раз) повышает стоимость резервированной системы по сравнению со стоимостью одного элемента)
Показатель эффективности Вg(t) является функцией времени t и поэтому проверка неравенств Вg(t)><1 должна осуществляться при разных t.
Определим показатели эффективности резервирования:



Функция P(t)=e-lt изменяется от 1 до 0.
При P(t0)=0,5 непосредственными расчетами получим:
В3(t0)=1, В5(t0)=1, В7(t0)=1
При t<t0 функция P(t)>0.5 и снова непосредственным расчетом устанавливаем, что В3(t)>1, В5(t)>1, В7(t)>1, tÎ[0, t0].
При t>t0 и P(t)<0.5 имеем В3(t)<1, В5(t)<1, В7(t)<1, tÎ[0, t0].
Результаты расчетов показателей эффективности схем показаны на рис. 3.45 и 3.46.

Рис 3.45 – Результаты расчета показателя эффективности резервирования  мажоритарной системы
мажоритарной системы

Рис 3.46 – Результаты расчета средней наработки на отказ мажоритарной системы из разного числа элементов
Итак, при малых значениях времени t, t<t0, когда элемент достаточно надежен и P(t)>0.5, введение резервных элементов в мажоритарную систему повышает ее надежность Pс(t), хотя несколько (на 8-9%) уменьшает среднюю наработку до отказа tHс.
При конструировании мажоритарной системы из малонадежных элементов с Р<0,5 (или при длительной эксплуатации ее) функция надежности Pс(t) становится меньше P(t) тем заметнее (на 8-9%), чем больше “голосующих” элементов включено в систему.
На практике чаще всего конструируют и применяют мажоритарные системы из трех или, реже пяти равнонадежных и относительно "новых" элементов с P(t)>0.5 при этом выбор числа m обусловлен представительностью информации от голосующих элементов, а не их надежностью. Такие резервированные системы достаточно надежны (по показателю Pс(t)) и обладают невысокой стоимостью.
Надежностная чувствительность локальных технических систем
Надежностная чувствительность технической системы характеризует влияние малых изменений параметров элементов на общесистемные показатели надежности типа Рс (t), tсн. Количественной мерой чувствительности системы по параметру а i служат функции (коэффициенты) чувствительности:
 ,
,  ,
, 
где аi – параметр или характеристика i-го элемента системы, i=1, 2, … (чаще всего в качестве а i выступает интенсивность отказов l i (t) или λi для экспоненциального распределения, реже – функция надежности Рi (t)).
Знание функций чувствительности полезно при выборе наиболее (наименее) изменчивых общесистемных показателей надежности резервируемой системы, а также при определении наиболее (наименее) “влиятельных” элементов и момента времени t0, когда показатели надежности максимальны (минимальны). Наконец, функции чувствительности находят применение при структурном и параметрическом синтезе технических систем с заданным или экстремальным уровнем надежности.
Рассмотрим более детально функции чувствительности простой системы, состоящей из m элементов с характеристиками λi, Рi (t); в качестве общесистемных показателей надежности будем использовать вероятность Рс (t) и среднюю наработку до отказа tсн.
Введем функции чувствительности показателей Рс (t), tсн по интенсивностям отказов λi,  :
:
 ,
,  ,
,
Эти функции имеют физическую размерность, определяемую размерностью λi, tсн (иногда их называют размерными чувствительностями). Размерность функций затрудняет сравнение чувствительностей разнородных систем, поэтому чаще всего используют безразмерные или логарифмические функции чувствительности:

 ,
,
Функции чувствительности ViP, Vit связаны с логарифмическими функциями ΨiP, Ψit простыми соотношениями:

 ,
,
Функции Ψit, Vit не зависят от времени, поэтому они называются коэффициентами чувствительности.
Аналитическое определение функций чувствительности
Пусть задана структурная надежностная схема некоторой простой локальной системы из m элементов с параметрами λi, Рi (t), i=1,m. Требуется определить безразмерные функции чувствительности системных показателей надежности Рс (t), tсн в любой момент времени t 0, 0< t 0<¥ по параметрам λi или Рi.
Показатель Рс (t) является функцией m переменных Рi, i=1,m:
Рс (t)= f (Р 1, Р 2, …, Рi, …, Рm).
Зная Pc(t), легко определяется и

Для нахождения чувствительностей продифференцируем Рс (t) и tсн по независимой переменной λi (или Рi) в произвольный фиксированный момент времени t 0 и получим размерные функции чувствительности:
 ,
,  ,
, 
Далее построим безразмерные функции чувствительности:
 ,
,  ,
,
Если требуется вычислить ординаты функции чувствительности  ;
;  , то вместо t 0 подставляется интересующее значение t.
, то вместо t 0 подставляется интересующее значение t.
Проиллюстрируем процедуру определения функций чувствительностей рядом примеров.
Задана нерезервированная система из m элементов с интенсивностями λi, (рис. 3.47).

Рис. 3.47 – К расчету чувствительности нерезервированной
системы из m элементов
Системные показатели надежности имеют вид:


где 
Определим функции чувствительности системы по параметру li при произвольном t:
 ,
,
 ,
,
Из анализа полученных выражений следует, что для безызбыточной системы размерные функции чувствительности не зависят от номера элемента и зависят только от значений интенсивностей отказов li, .
Логарифмические функции чувствительности для данной системы таковы:
 ,
,
 ,
,
Из последних формул следует, что форма функций ΨiP, Ψit не зависит от номера элемента, но интенсивность отказов li влияет на масштаб функции по оси ординат.
Чувствительность резервированной системы из двух элементов с интенсивностями l1, l2, l1  l2 (рис. 3.48) по общесистемным показателям Рс (t)= Р 1 + Р 2 – Р 1 Р 2 =
l2 (рис. 3.48) по общесистемным показателям Рс (t)= Р 1 + Р 2 – Р 1 Р 2 = 
 ,
,
по параметрам li,  при произвольном t определяется по выражениям:
при произвольном t определяется по выражениям:
 ,
,
 ,
,

Рис. 3.48 – К расчету чувствительности резервированной
системы из двух элементов
Функции чувствительности резервированной системы зависят от номера элемента i,точнее, от значения l i.
Логарифмические функции чувствительности при l1¹l2 таковы:
 ,
,
 ,
,
Для равнонадежных элементов, когда l1=l2=l и Р 1= Р 2= Р, получим более простые формулы:
 ,
,  ,
,
 ,
,  ,
,
Численный метод определения функций чувствительности
Для многих систем с неравнонадежными элементами производные представляют собой весьма сложные дробно-рациональные функции, что делает их малопригодными для анализа и синтеза надежностных схем. В этих случаях за функции чувствительности принимают конечные разности:
 ,
,
 ,
,
где Dl i – малые приращения l i.
По известным ViP, Vit далее вычисляются приближенные значения безразмерных функций чувствительности.


3.3. Надежностный синтез технических систем
Под надежностным синтезом понимается конструирование простых технических систем с заданными (желаемыми) или экстремальными показателями надежности.
При таком синтезе обычно учитывают некоторые дополнительные ограничения на количество используемых элементов, их характеристики, стоимость создаваемой системы и т.п. В результате этого надежностный синтез сводится к задаче на условный экстремум выбранного нами показателя надежности, зависящего от дискретных, непрерывных и лингвистических переменных. Решение подобных задач в общей постановке вызывает серьезные затруднения, поэтому ниже рассматриваются некоторые частные задачи надежностного синтеза локальных систем и процедуры их приближенного решения.
Анализ задачи надежностного синтеза
В задачу оптимального синтеза входят:
— критерий оптимальности,
— независимые переменные,
— ограничения на переменные,
— связи между переменными.
Критерии оптимальности.В качестве критерия П в задачах надежностного синтеза обычно используют:
— среднюю наработку до отказа tнс,
— вероятность исправной работы системы Pc(t0) в заданный момент
времени t0, 0<t0<¥.
Критерий П={tнс или Рс(t0)} в общем случае явно или опосредованно зависит от: структуры S системы; понятия отказа системы (ОС); вектора интенсивностей отказов L элементов, входящих в систему, т.е.
П=П(S, ОС, L)
СтруктураSв данной задаче определяется толькочислом элементов, каждый из которых имеет два состояния: отказ или работоспособность. Тогда структура S1 включает всего один элемент, структура S2 – имеет 2 элемента, и т.д. Наконец, последняя структура Sn будет включать n элементов (число n определяется человеком-экспертом в зависимости от условий задачи).
Для произвольной структуры Sj, 1<j<n, возможны разные варианты соединения элементов, например, последовательное или параллельное включение. Будем обозначать каждый вариант структуры Sj верхним индексом h, h=1,2,3,…, dj, т.е. получим запись Sjh. Тогда для S1 возможен только один вариант включения (рис. 3.49).

Рис. 3.49 – Пример структуры S1
Для структуры S2 возможны два варианта (рис. 3.50)

Рис. 3.50 – Примеры вариантов структуры S2
Для структуры S3 допустимы следующие 8 вариантов (рис. 3.51)

Рис. 3.51 – Примеры вариантов структуры S3
Из этих примеров видно, что число возможных вариантов каждой структуры Sj очень быстро возрастает по мере увеличения её номера j. Подобный бурный рост размерности задачи синтеза затрудняет её решение уже при структурах из 6-8 элементов.
Для снижения размерности задачи синтеза следует искусственно ограничивать число dj допустимых вариантов каждой структуры Sj. Делается это введением в условия задачи синтеза ряда ограничений, например, таких:
1. Задано число основных элементов;
2. Указана равнонадежность элементов;
3. Введено ограничение на стоимость всей системы.
В таком случае ограничение 1 «в синтезируемую систему входят 2 основных элемента» - оставляет для структуры S2 только один вариант S21;
для структуры S3 оказываются возможными всего три варианта – S31 , S32, S35 (если за основные элементы принять например 1 и 2).
Ограничение 2: - «все элементы равнонадежны» - не влияет на число вариантов структур S1, S2 и резко снижает число вариантов d3 до 4-х для структуры S3 (рис. 3.52):

Рис. 3.52 – Примеры допустимых вариантов структуры S3
Ограничение на стоимость синтезируемой системы эквивалентно уменьшению числа n используемых элементов с относительно малыми интенсивностями (напомним, что «дорогие» элементы обычно более надежны, а соответствующие интенсивности l - малы) или увеличение числа малонадежных элементов n с относительно большими интенсивностями l.
При постановке задачи синтеза структура системы S рассматривается как лингвистическая переменная, принимающая дискретные «значения» Sjh, j=1,2,…,n; h=1,2,…,dj, которые заранее выписываются человеком-экспертом и используются для вычисления по соответствующим формулам значения критерия П(Sjh) для каждого варианта Sjh.
Понятие «отказ системы». Значения критерия П(Sjh) зависят не только от структуры системы Sj или её варианта Sjh, но и от используемого расширенного понятия «отказ системы». Так, например, для системы S5 из пяти равнонадежных элементов с интенсивностью l под её отказом может пониматься случайное событие выхода из строя М элементов, М=1,2,3,4,5. Тогда из нижеприведенной табл. 10 видно, что изменение числа М с 1 по 5 изменяет среднюю наработку на отказ системы tнс более чем на порядок.
Таблица 10
Показатели надежности резервированной системы при расширенном понятии отказа
| М | Pc | tнc |
| Р5 | 0.200 
| |
| 5p4-4p5 | 0.45 
| |
| 6p5-15p4+10p3 | 
| |
| -4p5+15p4-20p3+10p2 | 
| |
| 1-(1-p)5 | 
|
Строго говоря, понятие «отказ системы» относится к условиям (описанию) задачи синтеза и не является независимой переменной критерия П, т.е. не может изменяться в процессе синтеза системы. Вводя условное обозначение «отказ системы» - ОС в перечень аргументов критерия П(S, ОС, l), мы хотели подчеркнуть, что формулы для вычисления Рс(t0) и tнc существенно зависят от лингвистического определения «отказ системы».
Интенсивности отказов элементов l. Значение критерия П, вычисляемого для каждого состояния системы Sj, зависит от вектор-функции интенсивностей
Lj(t)={ l1(t), l2(t),…, lj(t)}
или, чаще всего, для экспоненциального распределения наработок до отказа, от числового вектора
Lj={l1, l2,…, lg,…,lj}
При этом каждая компонента lg ограничена снизу и сверху

где  - физически или экономически возможные минимальные и максимальные интенсивности отказов.
- физически или экономически возможные минимальные и максимальные интенсивности отказов.
Интенсивность отказа  можно при синтезе системы рассматривать как непрерывную независимую переменную из интервала
можно при синтезе системы рассматривать как непрерывную независимую переменную из интервала  .
.
В этом случае после синтеза системы с желаемым показателем надежности на векторе L* возникает дополнительная задача конструирования или подбора элементов с интенсивностями отказов, равными оптимальным значениям  . Эта дополнительная задача может оказаться весьма сложной и трудоемкой (особенно при малом числе элементов в системе), поэтому при синтезе системы удобнее рассматривать каждую lg как дискретную переменную, принимающую некоторые возможные значения
. Эта дополнительная задача может оказаться весьма сложной и трудоемкой (особенно при малом числе элементов в системе), поэтому при синтезе системы удобнее рассматривать каждую lg как дискретную переменную, принимающую некоторые возможные значения
 из интервала .
из интервала .
При этом каждый набор  ,
,  соответствует существующей номенклатуре элементов с интенсивностями отказов . Обычно число k возможных значений (или номенклатурных вариантов одного элемента) невелико, k<3-5. Поэтому преобразование непрерывной переменной lg в дискретный аргумент несущественно усложняет общую задачу синтеза (напомним, что П(Sjh) уже является дискретной функцией лингвистической переменной S), но заметно упрощает последующую реализацию синтезированной системы (и снижает её стоимость, так как при конструировании используются только серийные элементы).
соответствует существующей номенклатуре элементов с интенсивностями отказов . Обычно число k возможных значений (или номенклатурных вариантов одного элемента) невелико, k<3-5. Поэтому преобразование непрерывной переменной lg в дискретный аргумент несущественно усложняет общую задачу синтеза (напомним, что П(Sjh) уже является дискретной функцией лингвистической переменной S), но заметно упрощает последующую реализацию синтезированной системы (и снижает её стоимость, так как при конструировании используются только серийные элементы).
Проведенный анализ задачи надежностного синтеза показывает целесообразность и необходимость рассмотрения критерия оптимальности Рс(t0) или tнс как кусочно-постоянной функции с разрывами I-го рода на множестве вариантов структур
Sjh, j=1,2,…, n, h=1,2,…,dj
и множестве дискрет lgm, g=1,2,…,j;  ; m=1,2,…,k
; m=1,2,…,k
при неизменном понятии «отказ системы», определяющим формулы для вычисления П(Sjh, lgm).
Ограничения задачи синтеза. К ним относятся ограничения снизу и сверху на интенсивности lg, структуры Sj и число целесообразных вариантов dj:


где числа n+ и dj+, j=1,2,… задается человеком-экспертом и указываются в условии (описании) задачи.
Одним из распространенных ограничений при надежностном синтезе систем является ограничение на их стоимость Сс. В первом

