




Расходомеры постоянного перепада давления относятся к группе расходомеров обтекания, т. е. к расходомерам, основанным на зависимости перемещения тела, воспринимающего динамическое давление обтекающего его потока, от расхода измеряемой среды. Измерительный орган этих расходомеров, перемещаясь вертикально, в зависимости от расхода изменяет площадь кольцевого зазора таким образом, что перепад давления по обе его стороны остается постоянным.Наиболее распространенными расходомерами постоянного перепада давления являются ротаметры. Основная измерительная часть ротаметров – ротаметрическая пара. Различают три типа ротаметрических пар (рис. 3.11).
Ротаметрическая пара первого типа состоит из измерительного конуса и поплавка (ротора). Эта конструкция применяется в стеклянных и металлических ротаметрах. Пара второго типа состоит из диафрагмы и поплавка и применяется в металлических ротаметрах. Ротаметрическая пара третьего вида состоит из кольцевого поплавка, размещенного в зазоре между внешним и внутренним конусами. Такие пары применяются в металлических ротаметрах для измерения больших расходов жидкости.

Рис. 3.11.Схемы ротаметрических пар: а – пара первого типа в стеклянных ротаметрах; б – то же в металлических; в – пара второго типа; г – пара третьего типа
Конструкции ротаметров. По конструктивному исполнению ротаметры подразделяют на стеклянные (рис 3.13), с местным отсчетом (РМ) и металлические с электрическим (РЭ) или пневматическим (РП) выходным сигналом. Поплавок у ротаметров типа РМ в зависимости от пределов измерения изготавливают из стали, анодированного дюралюминия, эбонита или титана. Ротаметры этого типа могут работать при температуре измеряемой среды в пределах от 5 до 50 оС. Они находят широкое применение в научных исследованиях, а также в промышленности для измерения небольших расходов жидкости и газов. Основная наибольшая приведенная погрешность составляет ± 2,5 %.Ротаметры типа РЭ с дистанционной электрической передачей показаний состоят из двух основных частей – ротаметрической и электрической (рис. 3.14). Ротаметрическая часть представляет одну из трех типов ротаметрических пар, размещенных в металлическом корпусе. Поплавок жестко связан с подвижной осью, перемещающейся внутри корпуса. Электрическая часть состоит из индукционной катушки и сердечника, закрепленного на оси поплавка. Катушка включена в дифференциально-трансформаторную схему вторичного прибора. Электрическая часть защищена от попадания измеряемой среды измерительной трубкой, а снаружи – кожухом. Ротаметры поставляются в комплекте с вторичным прибором, как правило, серии КСД. Нижний предел измерения ротаметров типа РЭ не более 0,2 от верхнего, класс точности 2,5.

Рис. 3.13. Ротаметры со стеклянной измерительной трубкой: а – с фланцевыми соединениями; б – с защитной трубкой; в – со штуцерами для шлангов; г – РС-3А
Ротаметры с процентной шкалой и унифицированным пневматическим выходным сигналом (0,02¸0,1 МПа) выпускают трех типов: РП с корпусом из нержавеющей стали, РПФ с корпусом, армированным фторопластом, и РПО с паровым обогревом корпуса. Связь поплавка с пневматической системой в ротаметрах типа РП осуществляется за счет сдвоенного магнита, установленного на подвижном шарнире поплавка, который через стенку корпуса управляет положением следящего магнита и связанной с ним заслонки. Эти приборы предназначены для применения во взрывоопасных производствах.

Рис. 3.14. Металлические ротаметры РЭ: а – для малых расходов; б, в – для больших и средних расходов
Ротаметры, особенно со стеклянной трубкой, требуют точной установки по вертикали. Отклонение оси ротаметра от вертикали на 1¸3о приводит к существенным дополнительным погрешностям измерения расхода.
К достоинствам ротаметров следует отнести сравнительно небольшие потери напора (D h £ 1 м), которые мало зависят от расхода (например, при изменении расхода в 5 раз потери напора увеличиваются в 1,5¸2 раза).
4.3 Объемные и массовые расходомеры
Схема автоматического объемного расходомера показана на рис. 6.60. При работе двигателя электроклапаны8 и 10открыты и топливо поступает от насоса к объекту испытания, минуя расходомер, внутри которого

Рисунок Схема объёмного расходомера с фотоэлектрической регистрацией уровня жидкости: 1-основной бак; 2-компенсационный бак; 3-трубопровод подачи сжатого воздуха; 4-трубка;
5-поплавок; 6-фотосопротивление; 7-источник света; 8 и 10-электроклапан; 9-трубопровод.
устанавливается определенный уровень топлива. Во время измерения электроклапан8 закрывают, топливо от насоса поступает по трубопроводу 9 в компенсационный бак 2,а воздух, находящийся в нем, перетекает в основной бак 1 и выдавливает из него топливо. Уровень топлива в трубке 4 падает так же, как в основном баке. Поплавок 5 открывает фотосопротивление 6,импульс тока от которого включает секундомер. При достижении поплавком другого фотосопротивления выдается сигнал на выключение секундомера и открытие клапана 8. Средний секундный расход определяется по формуле
 , где
, где  - мерный объём,
- мерный объём,  - плотность жидкости;
- плотность жидкости;  - время расходования мерного объема.
- время расходования мерного объема.
Одно из фотосопротивлений может перемещаться по трубке 4,что используется для выбора мерного объема из условия требуемого времени измерения.
Для правильной работы объемного расходомера необходимо обеспечивать следующие условия: во-первых,  ,иначе во время измерения топливо из компенсационного объема начнет перетекать в мерный объем, нарушая процесс измерения, и, во-вторых,
,иначе во время измерения топливо из компенсационного объема начнет перетекать в мерный объем, нарушая процесс измерения, и, во-вторых,  ,иначе при запоздалом включении электроклапана 8 в топливную магистраль может попасть воздух, нарушив нормальную работу двигателя.
,иначе при запоздалом включении электроклапана 8 в топливную магистраль может попасть воздух, нарушив нормальную работу двигателя.
С помощью подачи сжатого воздуха из магистрали 3 перед экспериментом создают необходимую воздушную подушку.
Объемные расходомеры обеспечивают высокую точность измерения — до ±0,5%, но имеют ряд недостатков:
1) невозможность измерения мгновенных расходов;
2) длительность измерения, что неудобно при подключении приборов к ЭВМ;
3) необходимость измерения температуры жидкости для определения ее плотности;
4) трудность использования в магистралях с повышенным давлением.
4.4 Турбинные расходомеры
Для измерения расходов компонентов топлива при испытаниях ДВС часто используют турбинные расходомеры (рис. 2.33). Расходомер состоит из аксиальной или тангенциальной турбины 2, вращающейся в подшипниках 7, счетчика оборотов 5 и 6, и регистрирующего прибора. Поток жидкости, проходя
через турбину 2, сообщает ей угловую скорость, пропорциональную объемному расходу. Счетчик оборотов может быть выполнен в виде простейшего прерывателя, создающего импульсы тока, или индуктивного датчика. Число импульсов (частота тока) пропорционально расходу, и поэтому регистрирующий прибор, измеряя число оборотов турбины, фиксирует именно расход жидкости. В лучших современных конструкциях, предназначенных для измерения расходов в трубопроводах диаметром от 4 до 1000 мм, основная приведенная погрешность доходит до ±0,2%, а постоянная времени прибора составляет менее 0,01 с в широком рабочем диапазоне  . Независимость работы датчика от давления в потоке и возможность изготовления деталей из материалов, устойчивых к воздействию измеряемых сред, позволяют использовать тахометрические расходомеры практически при любых теплотехнических исследованиях.
. Независимость работы датчика от давления в потоке и возможность изготовления деталей из материалов, устойчивых к воздействию измеряемых сред, позволяют использовать тахометрические расходомеры практически при любых теплотехнических исследованиях.
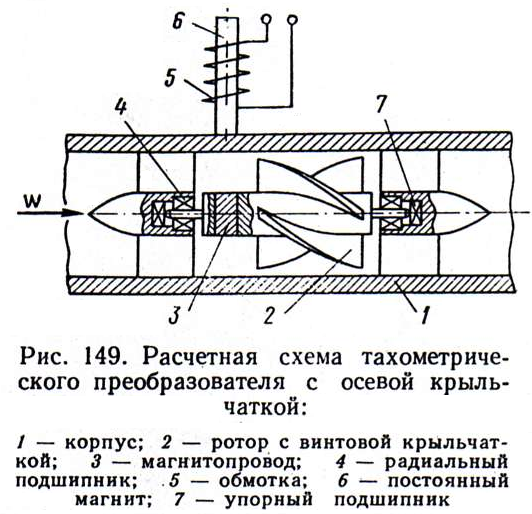
При универсальной электроизмерительной части расходомера основные метрологические и эксплуатационные свойства прибора определяются особенностями первичных преобразователей. Конструктивно скоростные тахометрические преобразователи выполняются либо с роторами в виде осевых или тангенциальных миниатюрных крыльчатыхтурбинок, либо со свободно вращающимися шариками (рис. 148). Прямолопастные осевые турбинки и шарики приводятся в движение с помощью предварительной закрутки потока, в тангенциальных камерах или на неподвижных винтовых шнеках. Встречаются конструкции (обычно малых калибров), в которых создается предварительная закрутка потока [29]. В тангенциальных турбинных преобразователях ротор вращается вокруг оси, перекрещивающейся с осью потока; лопасти турбинки выполняются в виде пластин или чашечек. Поток жидкости поступает на лопасти ротора через направляющий аппарат — одноструйный или многоструйный; первый предпочтительнее при малых диаметрах трубопровода, второй — при средних и больших. В шариковых тахометрических преобразователях увлекаемый закрученным потоком жидкости шарик движется со скоростью, пропорциональной окружной скорости потока и, следовательно, его объемному расходу. Центробежные силы удерживают шарик на периферии камеры преобразователя и препятствуют уносу его потоком. Шариковые преобразователи уступают крыльчатым в точности [погрешность порядка ± (1,5—2,0)% ], имеют повышенные гидравлические потери и узкий диапазон линейности статической характеристики, но зато работоспособны при значительных загрязнениях потока.
При вращении ротора турбинного преобразователя между частотой вращения n и расходом Q для осевой крыльчатки с винтовыми лопастями и тангециальной крыльчатки существуют следующие связи:

где S — площадь живого сечения потока в зоне лопастей крыльчаток; H— ход винтовой нарезки лопастей;  — диаметр наибольшей окружности лопастей тангенциальной крыльчатки.
— диаметр наибольшей окружности лопастей тангенциальной крыльчатки.
Эти формулы верны при следующих допущениях: не учитывается момент инерции ротора, поток жидкости принят плоским, без отрывов и завихрений, с равномерной по сечению S эпюрой скоростей; измеряемая среда невязкая; поток однофазный, несжимаемый, с постоянной температурой; отсутствуют какие-либо причины, вызывающие торможение ротора; геометрические размеры ротора выполнены идеально, дисбаланс масс отсутствует. Реально ни одно из указанных допущений не может быть полностью выполнено, и действительное значение n будет отличаться от  . Для количественной оценки разницы частот вращения вводится величина относительной погрешности
. Для количественной оценки разницы частот вращения вводится величина относительной погрешности

иногда называемая в литературе скольжением ротора относительно потока.

Рисунок Основные схемы тахометрических преобразователей расходомеров: 1-чувствительный элемент: 2-вторичный преобразователь (тахометр).
Большой интерес представляют схемы, основанные на использовании элементов тахометрических объемных расходомеров с приводом от потока измеряемой среды.
Примером одной из наиболее удачных конструкций массового тахометрического преобразователя такого типа может служить расходомер фирмы «Potter» принципиальная схема которогоприведена на рис. 165. Чувствительные элементы расходомера представляют собой две идентичные крыльчатки с осевой разгрузкой упорных подшипников, отличающиеся только углом установки лопастей. Между крыльчатками имеется упругая связь в виде пружины, поэтому крыльчатки вращаются с одинаковой скоростью, несмотря на разный наклон лопастей, но во время вращения разворачиваются относительно друг друга на некоторый угол. Момент вращение, приложенный к пружине, определится по изменению момента количества движения среды на выходе из первой крыльчатки.(см. X1.145)
Угол относительного разворота крыльчаток равен

где С —жесткость пружины. Таким образом, отношение  оказывается линейно зависящим от массового расхода
оказывается линейно зависящим от массового расхода  . Это отношение представляет собой интервал времени между импульсами сигналов индукционных преобразователей.
. Это отношение представляет собой интервал времени между импульсами сигналов индукционных преобразователей.

Рисунок Тахометрический преобразователь массового расходомера с приводом от потока:
1,4-вторичные преобразователи; 2,5-крыльчатки роторов; 3-пружина; 6-счётчик; 7-схема совпадений; 8-образцовый генератор.
Вихревой расходомер

Рисунок 1 принцип действия вихревого расходомера.
Устройство и принцип действия
Конструктивно датчик представляет собой моноблок, состоящий из корпуса проточной части и электронного блока.
| i |
Электронный блок представляет собой плату цифровой обработки сигналов первичных преобразователей, заключенную в корпус.
Измерение расхода газа реализовано на вихревом принципе действия. На входе в проточную часть датчика установлено тело обтекания 1.
За телом обтекания, по направлению потока газа, симметрично расположены два пьезоэлектрических преобразователя пульсаций давления 2.
При протекании потока газа (пара) через проточную часть датчика за телом обтекания образуется вихревая дорожка, частота следования вихрей в которой с высокой точностью пропорциональна скорости потока, а, следовательно, и расходу. В свою очередь, вихреобразование приводит к появлению за телом обтекания пульсаций давления среды. Частота пульсаций давления идентична частоте вихреобразования и, в данном случае, служит мерой расхода.
Пульсации давления воспринимаются пьезоэлектрическими преобразователями, сигналы с которых в форме электрических колебаний поступают на плату цифровой обработки, где происходит вычисление объемного расхода и объема газа при РУ и формирование выходных сигналов по данным параметрам в виде цифрового кода.
Преобразователь избыточного давления 3 тензорезистивного принципа действия размещен перед телом обтекания вблизи места его крепления. Он осуществляет преобразование значения избыточного давления потока в трубопроводе в электрический сигнал, который с выхода мостовой схемы преобразователя поступает на плату цифровой обработки.
Термопреобразователь сопротивления платиновый 4 размещен внутри тела обтекания. Для обеспечения непосредственного контакта ТСП со средой в теле обтекания выполнены отверстия 5. Электрический сигнал термопреобразователя также подвергается цифровой обработке.
Плата цифровой обработки 6, содержащая два микропроцессора, производит обработку сигналов преобразователей пульсаций давления, избыточного давления и температуры, в ходе которой обеспечивается фильтрация паразитных составляющих, обусловленных влиянием вибрации, флуктуаций давления и температуры потока, и происходит формирование выходных сигналов многопараметрического датчика по расходу, объему при РУ, давлению и температуре ввиде цифрового кода выходные сигналы передаются на вычислитель 7. _________
Проточная часть датчика и тело обтекания выполнены из стали 12Х18Н10Т.

