




СОДЕРЖАНИЕ
Введение………………………………………………………………………
1. Задачи технической диагностики…………………………………………..
2. Основные положения технической диагностики…………………………
3. Классификация методов диагностики энергетического оборудования…
3.1 Этапы диагностического обеспечения………………………………..
3.2. Общая методика получения диагностического обеспечения…….
3.3. Прогнозирующее диагностирование ………………………
3.4. Основные показатели средств технической диагностики………
3.5.Показатели эффективности процесса диагностирования………
3.6.Оценка эффективности процесса прогнозирования……………
3.7.Диагностические модели с применением теории подобия………
3.8 Классификация диагностических моделей…………………
3.9. Вероятностные диагностические модели……………………
3.10. Диагностическая модель разладки……………………………
3.11. Модели прогнозирования технического состояния оборудования..
3.12. Структура и задачи основных систем отраслевой системы
диагностирования………………………………………………
3.13. Организация локальной системы диагностирования
котлоагрегатов………………………………………………………………
3.14.Диагностические модели поверхностей нагрева…………………
3.15. Автоматизированная система температурного контроля металла
моноблока……………………………………………………………………
3.16. Автоматизированная система учета расхода металла……………
4. Диагностирование роторного и электротехнического оборудования……
4.1. Методы и средства диагностирования роторных механизмов……
4.2. Методы диагностирования турбин………………………………
4.3. Тепловизионный метод……………………………………………
4.4. Автоматизированные диагностические системы электронного
управляющего оборудования…………………………………………
4.5. Особенности диагностирования устройств релейной защиты и
автоматики…………………………………………………………………..
4.6. Методы проверки датчиков преобразования и аналоговых блоков….
4.7. Организация диагностирования в АСУ ТП…………………………
4.8 Диагностирование водно-химических режимов……………………
4.9. Методы прогнозирующего диагностирования для ВХР.......................
5. Основы технической диагностики……………………………………….
5.1. Основной принцип технической диагностики………………………
5.2. Термины и определения……………………………………………
5.3. Разделы технической диагностики…………………………………
5.4. Основные этапы технической диагностики…………………………
5.5. Функциональная и тестовая диагностика………………………………
5.6. Методология технической диагностики……………………………
5.7. Выбор диагностического сигнала………………………………………
6. Общие понятия об акустическом шуме и вибрации……………………
6.1. Акустический шум……………………………………………………….
6.2. Волновое уравнение……………………………………………………..
6.3. Особенности восприятия акустического шума человеком…………….
6.4. Вибрация…………………………………………………………………..
6.5. Единица измерения шума и вибрации…………………………………..
6.6. Анализ вибродиагностических сигналов………………………………..
6.7. Анализ уровней вибрации………………………………………………..
6.8. Анализ ударных импульсов………………………………………………
6.9. Частотный анализ………………………………………………………….
6.10. Частотный анализ с постоянной абсолютной шириной полосы
пропускания..………………………………………………………………
6.11. Частотный анализ с постоянной относительной шириной
пропускания…………………………………………………………………
6.12. Особенности использования частотного анализа в основных методах
мониторинга и диагностики…………………………………………………
7. Средства измерения и анализа виброакустических сигналов……………..
7.1. Измерительные преобразователи……………………………………
7.2. Измерительные преобразователи шума – микрофоны………………
7.3. Измерительные преобразователи вибрации…………………………
7.4. Измерительные преобразователи вибросмещения………………
7.5. Вихретоковые преобразователи……………………………………
7.6. Измерительные преобразователи виброскорости…………………
7.7. Измерительные преобразователи виброускорения…………………
7.8.Анализаторы…………………………………………………………
7.9. Программное обеспечение для вибромониторинга и диагностики……
7.10. Виброакустические диагностические модели узлов и машин………
7.11. Последовательность процедур при построении диагностической
модели………………………………………………………………………
7.12. Основные частоты вибрации подшипников качения………………
7.13. Определения пороговых значений………………………………
7.14. Концепция системы диагностики конденсационной установки
паровой турбины…………………………………………………………
7.15. Диагностика турбогенераторов………………………………
7.16. Диагностика котлоагрегатов……………………………………..
7.17. Диагностика вспомогательного оборудования………………….
8. Основные направления совершенствования организации ремонтов и
эксплуатации оборудования………………………………………………..
8.1. Этапы ввода системы мониторинга и вибродиагностики
технического состояния оборудования (МиВД ТСО)…………………….
8.2. Заключение……………………………………………………………
Литература…………………………………………………………………………
1. Коэффициент готовности:
Кг = [Тр/(Тр + Тн.п. )]·100%,
где Тр- суммарное время работы в часах.;
Т н.п. - суммарное время непланового (аварийного) простоя, в часах..
2. Коэффициент аварийности:
Кав = [Т н.п. (ав)/(Т н.п. (ав)+Тр)]·100%; или Кав=(1-Кг)·100%.
3. Коэффициент оперативной готовности:
Ког = [(Тр+Трез)/Т к]·100 %,
где Трез- cуммарное время простоя оборудования в резерве по диспетчерскому графику в часах;
Т к - рассматриваемый календарный период (1 год =8760 ч.)
4. Коэффициент рабочего времени:
Кр = [Тр/Тк]·100%.
5. Коэффициент неплановых простоев (недоиспользование календарного времени из-за неплановых простоев):
К н.п. = [Т н.п. /Тк]·100%.
6. Коэффициент плановых простоев:
Кпл = [Тпл/Тк]·100%,
где Тпл – время использования установленной мощности.
7. Коэффициент использования установленной мощности:
Куст = [Э/Nном·Тк]·100%,
где Э-выработанная электрическая энергия;
Nном – номинальная мощность.
8. Наработка на отказ, в часах.:
То = Тр/n
где n-количество отказов.
9. Параметр потока отказов (определяется в расчете на 1000 или 10000 часов):
W= n/Тр.

Рис. 1. Классификация методов диагностирования энергетического оборудования в различных режимах.
Для диагностирования любой объект характеризуют совокупностью параметров Хi, i=1,…k. Любой объект можно описать математической моделью Мj (j = 1, …m) с различной степенью адекватности. Параметры, которые характеризуют существенные свойства объектов, называют определяющими.
Система называется полностью наблюдаемой на интервале t o, t 1 , если ее начальное состояние Х (t o) можно определить по измеренному на этом же интервале вектор Y (t 1). Система называется полностью управляемой, если из некоторого начального состояния Х (t o) ее можно перевести в любое другое состояние Y (t 1) за конечный интервал времени t o, t 1 воздействием на нее управления G (t) € G, где G – некоторый заданный класс функций. Эти свойства определяют техническое состояние объектов и различимости и оценить возможности их реализации. Условия работоспособности представляют собой правила, разделяющие конечное множество Х возможных состояний объекта на подмножества работоспособных Х o и неработоспособных Хf состояний,
Х = Х o U Хf. Признак наличия дефекта представляет собой условия различия каждого состояния в подмножествах Х o, Хf. Если обозначить через ΔWi приращение информации, получаемое при наблюдении за i- том (i = 1, n) параметром объекта или за совокупностью их, а через C i - стоимость такого наблюдения, то отношение ΔWi / C i можно использовать в качестве оценки значимости и реализуемости наблюдения за i- тым параметром или за группой параметров.
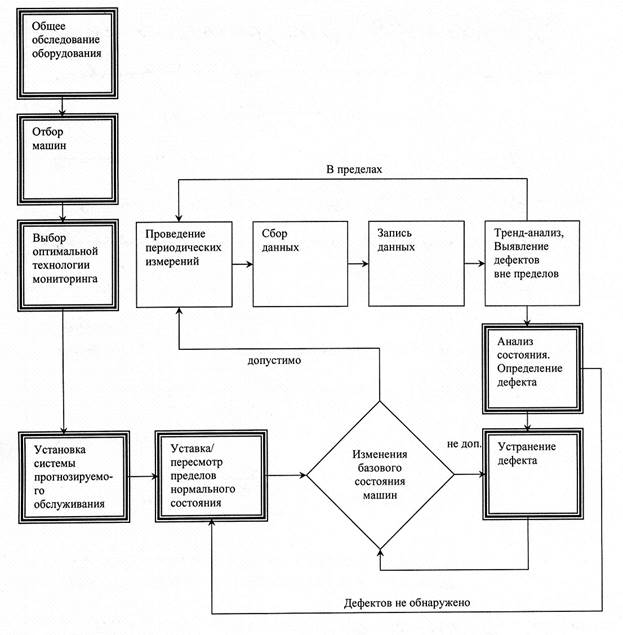
Рис. 2. Структурная схема прогнозирующего диагностирования.
Эффективность всей отраслевой системы по отношению к энергоблоку можно оценить коэффициентом готовности:
Кг=Wо/(Wо+ Wn),
где Wо- мощность, отдаваемая энергоблоком за время 0, t;
Wn-мощность, которая теряется в результате простоя энергоблока.
Существуют и другие показатели, например: время обнаружения дефекта tо, время поиска tп, время устранения неисправности tу, а также вероятность обнаружения и устранение за время 0,t и др.. На основе понятия элементарных операций рассматриваются элементарные действия, например, Oj (t), где j=1,k, осуществляемые совокупностью π{π j1 … π jr} определённых приборов, которыми работает персонал за определенный интервал времени. В качестве таких действий могут быть:
Например, показатель достоверности контроля является функцией от элементарных операций D = f {О1 (t),О2 (t), …, Оk (t)}. Аналогично можно записать выражения и для других показателей.
Схема принятия решения при диагностировании. Таблица 1
| Действительное состояние объекта | Принятое решение | Условные обозначения события | Вероятность сложения событий |
| Исправен Q | Исправен S Неисправен Q‾ | Q S Q Ѕ‾ | Р1 Рл |
| Неисправен Q‾ | Исправен S Неисправен Ѕ‾ | Q‾ S Q‾ Ѕ‾ | Рн Р2 |
Вероятность Р1 и Р2 соответствуют правильному принятию решения при контроле. Вероятность Рл - ложная вероятность, Рн - неправильная,
которая возникает вследствие неточности измерительных приборов.
Вероятность Рл- ошибка первого рода, а пропуск дефекта Рн- ошибка второго рода.
Pл = òGo Wc (x) dx x € Go
Рн = ò Gi Wc (x) dx x € G1,
Wc (x)- функция распределения ошибки измерения;
Go,G1- области интегрирования, которые определяются выбранным допуском.
В этом случае достоверность диагностирования:
D=1-(Рл+Рн)
Схема принятия решения при диагностировании с учетом ненадёжности средств диагностирования. Таблица 2
| Действительное состояние | Принятое решение | Условное обозначение события | Вероятность сложного события | |
| ОД | CД | |||
| исправен Q | Исправны К | Исправен S неисправен S‾ | QKS QK S‾ | Р1 Рл |
| неисправен Q‾ | Исправен S неисправен S‾ | Q‾ KS Q‾ K S‾ | Рн Р3 | |
| исправен Q | Неисправны К‾ | Исправен S неисправен S‾ | Q К‾ S Q К‾ S‾ | Р1 Рл |
| Неисправен Q‾ | исправен S неисправен S‾ | Q‾ К‾ S Q‾ К‾ S‾ | Рн Р2 |
Для комплексной оценки достоверности СД необходимо учитывать степень полноты отражения контролируемыми параметрами наличия дефектов Рд (модельная составляющая) и степени Ри определения диагностических признаков контрольно-измерительных аппаратурой (метрологическая составляющая). В этом случае Рк= Рд×Ри,
где Рд=Р (х i)× Р(kl /х i)/R; Р(х i) – вероятность возникновения отказа по причине хi, Р(kl /хi) – условная вероятность признака kl при наличии причины отказа хi;
R =? Р(х j)×Р(kl /х i), где m - число признаков. Составляющая Ри определяется точностью используемых приборов для измерения и принятия решения (Ри = D).
Пусть надежность оценивается коэффициентом готовности и средними потерями. Тогда при текущем диагностировании
To n - To об
Кг = (Dт /Tо п) ò Fо (t) dt,
o
где Dт- достоверность текущего диагностирования;
То п и То об -период и средняя длительность периодического обслуживания объектов;
Fо (t) -вероятность безотказной работы объекта.
В то же время вероятность готовности объекта:
Рт(tк)= Рср·Dт·Fоо(tк),
Рср -вероятность нахождения средств в рабочем состоянии;
Fоо(tк)-функциональное распределение длительности обслуживания объекта.
Рассмотрим средние потери W:
Ẅ= С1·Рл+С2·Рн
С1 и С2 -средние потери при ложном отказе и пропуске отказа.
Таким образом, при прогнозном диагностировании:
Кг=Dп(τ)- функция от τ, где Dп(τ) -показатель достоверности прогнозного диагностирования; τ-шаг прогнозирования, который принимает в описанных условиях значения: τ, 2τ, …, n τ.
Анализируя эти выражения для различных значений Dп (τ) и Dт можно увидеть, что использование прогнозирующего диагностирования даже при низких значениях Dп (τ) дает значительный выигрыш, равный в первом приближении идеальному текущему диагностированию (Dт=1).
Теоретической базой моделирования является теория подобия. Изучение условий подобия явлений производят на основе уравнения Навье-Стокса
- jрх/jх + mj2wх/jz2 +rg х=rw хjw х/jх + rjw х/jt.
(P) (T) (G) (I1) (I2)
В этом случае первый член левой части этого уравнения отражает влияние поверхностных нормальных сил (Р), второй – поверхностных касательных (вязкостных) сил, создающих трение (Т), третий – силу тяжести (G).
Правая часть уравнения учитывает действия инерционной силы (I1,I2). Скорость в каждой точке будет меняться в зависимости от времени
(rjw х/jt –локальное изменение I2), но в то же время скорость изменяется и от того, что рассматриваемая точка за это время изменила свое положение (jw х/jх – конвективное изменение I1).
Теоретической базой моделирования является теория подобия. Изучение условий подобия явлений производят на основе уравнения Навье-Стокса
- jрх/jх + mj2wх/jz2 +rg х=rw хjw х/jх + rjw х/jt.
(P) (T) (G) (I1) (I2)
В этом случае первый член левой части этого уравнения отражает влияние поверхностных нормальных сил (Р), второй – поверхностных касательных (вязкостных) сил, создающих трение (Т), третий – силу тяжести (G).
Правая часть уравнения учитывает действия инерционной силы (I1,I2). Скорость в каждой точке будет меняться в зависимости от времени
(rjw х/jt –локальное изменение I2), но в то же время скорость изменяется и от того, что рассматриваемая точка за это время изменила свое положение (jw х/jх – конвективное изменение I1).
Сила трения возникает вследствие градиента скорости, что связано с переносом из одного слоя в другой некоторого количества движения. Интенсивность этого процесса связана с вязкостью жидкости m.
В таблице 3 представлены 20 комбинаций, дающих десять различных соотношений. Однако среди них будет только четыре самостоятельных (независимых друг от друга) критерия подобия, комбинацией которых можно получить остальные шесть.
Таблица 3
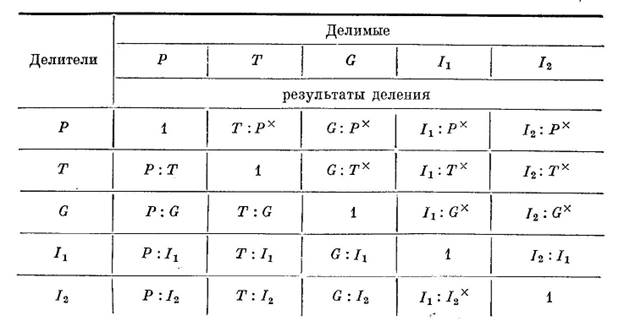
Отношения, имеющие обратные значения в таблице 3, отмечены звездочкой в практике во внимание не принимаются. Рассмотрим остальные десять комбинаций: P/T, P/G, T/G, P/I1, T/I1,G/I1, I2 /I1, P/I2, T/I2,G/I2.
Из ранее изученных дисциплин известны следующие критерии:
P/I1 " Eu = r p/ r w2 – критерий Эйлера; I1 /T " Re = wlr /µ - критерий Рейнольдса; I1 /G " Fr = w2 /gl – критерий Фруда; I1 /I2 " Ho = w t /l – критерий гомохронности.
Все остальные критерии подобия можно получить из этих четырех:
P/T = P/ I1 * I1 / T = Eu Re; P/G = P/ I1 * I1 /G = Eu Fr; T/G = I1 /G: I1 /T = Fr/ Re; P/I2 = P/I1* I1 /I2 = Eu Ho; T/I2 = I1 /I2: I1 /T = Ho/ Re; G/I2 = I1 /I2: I1 /G = Ho/ Fr.
Рассмотрим аналитическое прогнозирование.
Пусть контролируемый параметр y(t) в области 0 - τn принимает значения y(τ0), y(τ1),…,y(τn), которые зафиксированы системой диагностирования. Необходимо по известным значениям y(τi) контролируемой функции в прошлом предсказать значения величин y (τn+1), …, y(τn+m), где τn+i > τn.
Для вероятностного прогнозирования по известным значениям y(τi) определяется вероятность того, что значения функции y(τ) не выйдут за допустимые пределы: Р {|yi (τn+i) - yn (τ) |} < e.
. В этом случае: yi (τn+i) -значение контролируемой функции; yn (τ) -требуемое изменение функции при исправном состоянии
Для длительной прочности предложена экспериментальная зависимость для твердых материалов:
tp = to exp [(uо - υ σ)/RT],
где to – постоянная; tp – время до разрушения; uо -эффективная энергия активизации в ненагруженном состоянии; υ- структурный параметр; σ- напряжение; Т- абсолютная температура; R- газовая постоянная.
Статистическая обработка и анализ результатов испытаний жаропрочных материалов показывает, что при оценке прогноза времени до разрушения можно применять следующее уравнение:
tp = AT2 σ-m1 exp [(uо - υ σ)/RT], где m1 – коэффициент.
Это уравнение можно разложить в ряд и получить коэффициент экспериментальным путем на основе обработки опытных данных.
Для прогнозирования используется так же зависимость Ларсена-Миллера и ее различные модификации.
Одна из модификаций имеет следующий вид:
tp = to exp{- 2,3 (C – C1/T)}, где С и С1 – постоянные коэффициенты; Т-температура.
Для сложнонапряженного состояния материалов или конструкций используются выражения, которые получаются экспериментальным путем на основе уравнений полинома:
y(τ)=F1(τ)·A1 (τ)+F2(τ)·A2(τ)+…, где А- весовые коэффициенты;
F(τ) - составляющая функция.
Рассмотрим прогнозирование для электромеханического оборудования. Зависимость пробивного напряжения “u” от температуры Т имеет следующий вид: u(T)= u(T1)exp {- a(Т1-Т)}. Для проводов и кабелей имеется зависимость типа ℓn τ= A/Т+В, где Т- абсолютная температура; А, В –коэффициенты, зависящие от материала и конструкции кабеля.
Существует три вида вероятностного прогнозирования:
1. По всему известному прошлому о реализации процесса Z(t), который является результатом преобразования без помех интересующего процесса W(t)
2. По частично известному прошлому о реализации процесса Z(t), который не искажен помехами, а реализации представлена не всеми своими состояниями
3. По частично известному прошлому о наблюдаемом процессе Z (t), который является результатом преобразования W(t) при наличии помех
Математическая постановка задачи требует точного знания статических характеристик Z(t), W(t) и характеристик их совокупности { Z(t), W(t)}.
Моделью, которая характеризует состояние пароперегревателей как объекта диагностики, является зависимость, которая связывает временное сопротивление stb с температурой T, давлением p, конструкцией трубы S, а также сортом металла g, т.е. stb = f (T, P, S, g) (1).
Разрушение пароперегревателя происходит тогда, когда главное напряжение достигает некоторого допустимого (предельного) значения sb доп, т.е. выполняется условие: ub = sb max - sb доп ³ 0 (2)
Зависимость (1) можно найти экспериментально или рассчитать. Для экспериментального нахождения зависимости (1) используется метод планирования эксперимента.
Для расчета stb необходимо знать текущие параметры технологического процесса, т.е. вычислить радиальное str и тангенциальное stt напряжения в стенках труб с использованием функции напряжения, которая удовлетворяет неоднородному бигармоническому уравнению.
В такой постановке задача является достаточно сложной для практической реализации.

Рис. 3. Классификация вращающихся (роторных) механизмов.
Вероятность правильного диагноза по Байесу –это условная вероятность наличия состояния хi после появления признака kj:
P (xi /kj) = P (xi) P (kj /xi) / P (kj)

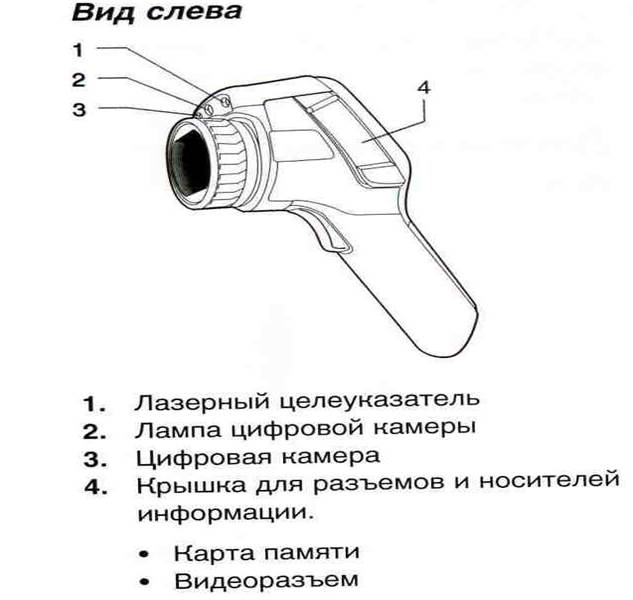


Рис.4. Тепловизор
Метод мажорирования состоит в том, что для измерения некоторого параметра “х” используют дополнительные датчики “y” и “z”, а результат измерения получают путем присвоения измеренному параметру значение по значениям большинства датчиков. Например, если измеряется цифровая величина, то решение принимается по правилу R = xy Ú xz Ú yz.
В этом случае, разность между фактическим и эталонным значениями диагностических параметров называется диагностическим симптомом.
∆=Өф - Өэт (1)
 Рис. 5. Функциональная схема технического диагностирования.
Рис. 5. Функциональная схема технического диагностирования.
1. Техническое состояние - совокупность свойств объекта, определяющих возможность его функционирования и подверженных изменению в процессе производства, эксплуатации и ремонта.
2. Работоспособный объект - объект, который может выполнять возложенные на него функции.
3. Зарождающийся дефект - потенциально опасное изменение состояния объекта в процессе его эксплуатации, при котором значение информативного параметра (или параметров) не вышло за пределы допусков, задаваемых в технической документации.
4. Дефект - изменение состояния объекта в процессе его изготовления, эксплуатации или ремонта, которое потенциально может привести к уменьшению степени его работоспособности.
5. Неисправность - изменение состояния объекта, приводящее к уменьшению степени его работоспособности.
6. Отказ - изменение состояния объекта, исключающее возможность продолжения его функционирования.
7. Параметры состояния - количественные характеристики свойств объекта, определяющие его работоспособность, заданные в технической документации на изготовление, эксплуатацию и ремонт.
8. Мониторинг - выполняемые без вмешательства в функционирование объекта процессы измерения, анализа и прогнозирования, контролируемых параметров или характеристик объекта с отображением их во времени, сравнением с ретроспективными данными и с пороговыми значениями.
9. Диагностика(диагностирование) - процесс определения состояния объекта.
10. Диагноз - заключение о состоянии технического объекта.

Рис. 6. Структура технической диагностики.

Тренд на рисунке 7 (а) характеризуется 4-мя этапами:
1 этап Т1- приработка машины,
2 этап Т2- нормальная работы,
3 этап Т3- развитие дефекта,
4 этап Т4- этап деградации, т.е. устойчивое развитие цепочки дефектов с момента, когда появляется потребность в обслуживании или ремонте объекта, до момента возникновения аварийной ситуации. Этап деградации заканчивается поломкой узла или оборудования.
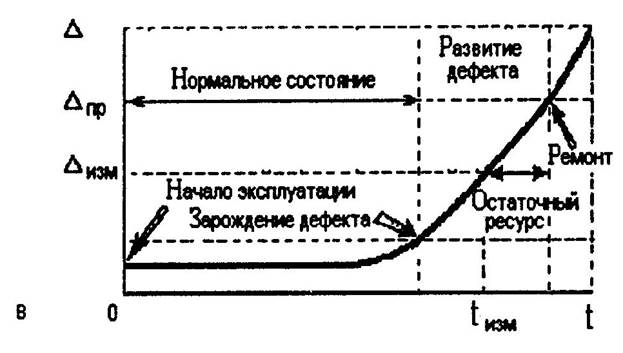
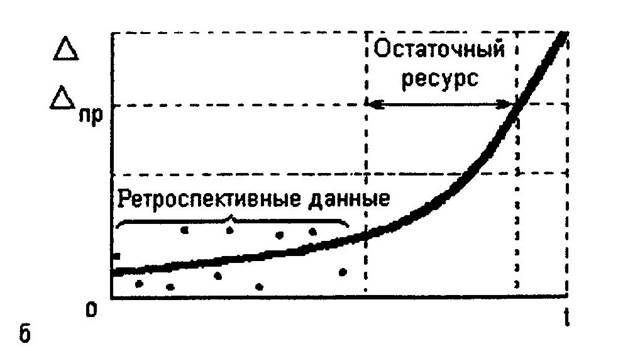
Тогда остаточный ресурс в первом приближении может быть оценен как разность времени t пр,соответствующему предельного значению диагностического симптома ∆пр и времени t изм, соответствующего значению диагностического симптома ∆изм на момент измерения диагностического параметра.

Рис. 7. Тренды: а - типовая зависимость величины диагностического симптома от времени; б - тенденция развития диагностического симптома во времени, построенная по ретроспективным данным с дальнейшей экстраполяцией аппроксимирующей зависимости (• - экспериментально полученные данные); в – зависимость изменения диагностического симптома от времени, построенная с момента нормальной работы машины до выхода ее из строя; г – зависимость диагностического симптома от времени с момента развития первого дефекта до полного выхода машины из строя.
Во многих практических случаях тренды могут быть немонотонными. На рис. 7,г представлен тренд, участок I которого характеризует развитие одного дефекта, на участке II наблюдается стабилизация уровня вибрации и на участке III производная изменения уровня вибрации увеличивается в результате появления еще одного дефекта. Тогда достоверный прогноз состояния объекта и оценка остаточного ресурса возможны только на последнем участке развития цепочки дефектов.
 .
.
Рис.8. Схема основных операций функциональной и тестовой диагностики.

Рис. 9. Процесс формирования технического диагноза.
Алгоритмы диагностирования составляются при следующих допущениях:
1. Объект может находиться в конечном множестве состояний S, которое
делится на два подмножества S1 (бездефектные состояния) и S2 (состояния с различными дефектами, при которых объект остается работоспособным).
Каждое состояние из подмножества S2 отличается степенью или запасом работоспособности.
2. Состояние объекта характеризуется совокупностью диагностических
показателей d1, d2,…..,dк, которая представляет собой вектор состояния D:
D = (d1, d2,…..,dк).
3. Диагностические показатели могут представлять собой параметры или характеристики. В качестве параметров могут быть использованы, например, уровень вибрации или акустического шума, давление, сопротивление изоляции, температура и т.п. В качестве характеристик могут быть использованы показатели, характеризующие форму кривой, например, огибающая спектра сигнала вибрации или шума (маска), затухание, крутизна и т.п.
4. Условия работоспособности задают областью работоспособности исходя из следующих предположений:
- вектор состояний оборудования определен,
- существует номинальный вектор состояний,
- отклонения вектора состояний от номинального допускается только в определенных пределах,
- допустимые отклонения определяют область работоспособности.
Условия работоспособности задают по-разному для случаев использования в качестве диагностического показателя параметров или характеристик.
Если в качестве диагностического показателя используется один параметр,то условия работоспособности задаются неравенствами, которые ограничивают его значение с одной или с двух сторон. Таким образом, объект работоспособен, если все неравенства выполняется:
1. di >diн, di<diв или diн< di<diв ,
где di, diн и diв - соответственно, текущее, нижнее допустимое и верхнее допустимое значения диагностического параметра.
2. Каждый из диагностических показателей состояния dj может определяться по совокупности диагностических параметров dji,…, djl: dj = dji, …, djl.
3. Для каждого диагностического параметра di существует номинальное значение dоi, область допустимых отклонений ∆оi и предельное отклонение (порог опасного изменения параметра) ∆прi, при превышении которого объект считается неработоспособным и должен быть остановлен.
Объект считается бездефектным, если для каждого параметра выполняется неравенство: |d i -d оi |≤∆ оi, где ∆ оi - порог допустимого отклонения.
Объект считается неработоспособным, если хотя бы для одного из параметров выполняется неравенство: | d i -d оi | >∆прi, где ∆прi - порог опасного изменения параметра.
Во всех случаях объект имеет ограниченную работоспособность.
В качестве диагностических показателей могут быть использоваться не только параметры, но и характеристики объекта, типа: у= f(x), где «х», «у» входная и выходная переменные соответственно.
В этом случае условие работоспособности объекта определяется степенью отклонения rр (f, φ) текущих характеристик f(х) объекта от номинальной φ(х).
Сложные объекты в целом оцениваются как работоспособные при условии работоспособности каждого узла или структурной единицы.
В случаях ограниченной работоспособности контролируемого объекта при любой степени (запасе) его работоспособности задачами диагностики являются идентификация и прогноз развития имеющихся дефектов, определение интервала безаварийной работы или остаточного ресурса объекта.
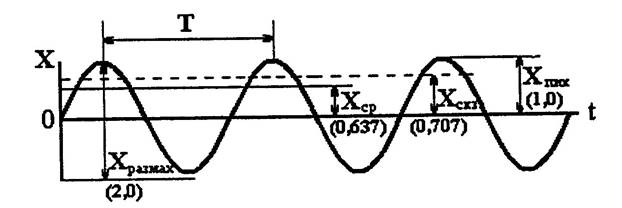
Рис. 10. Простейшее гармоническое колебание.
Для количественного определения величин акустического шума или механических колебаний во временной области используются следующие значения:
- Хпик - пиковое значение, которое характеризует максимальное значение колебаний, но не отображает его развития во времени;
т
- Хскз =√`1/Т ò о Х2 (t) dt – среднеквадратическая (эффективное) значение, которое представляет собой квадратный корень из усредненных во времени, возведённых в квадрат мгновенных значений. Этот параметр имеет особую важность, т.к. связан с энергией, а следовательно, с разрушающей способностью колебаний.
Для гармонических колебаний:
- Хскз = Хпик / √`2;
т
- Хсред = 1/Т ò о /Х/ dt - среднее абсолютное значение, связанное с развитием механических колебаний во времени;
- Хразмах - размах колебаний (двойная амплитуда);
- К= Хпик/Хскз - пик-фактор (амплитудный коэффициент), числовое значение тем больше, чем больше выражен импульсный или случайный характер колебаний. Для синусоидальных колебания: К= √`2.
В то же время для простейшего гармонического колебания можно записать:
Х(t) = Хо cos (wо t + jо) = Хо e- j (wot +jo),
где Хо.- амплитуда; wо –частота; φо - начальная фаза; t-время. Следует отметить, амплитуда, частота и начальная фаза сигнала – три независимых параметра, каждый из которых может содержать диагностическую информацию. В то же время кроме гармонических составляющих в реальном сигнале шума или вибрации оборудования присутствуют, как правило, случайные составляющие, представленные рис. 11.

Рис. 11. Случайный сигнал.
Реальный сигнал акустического шума или вибрации оборудования представляет собой совокупность гармонических и случайных составляющих, представленные на рис. 12.

Рис. 12. Сигнал вибрации электродвигателя.
Например, спектр простейшего гармонического колебания имеет вид, представленный на рис. 13,а (справа).

Рис.13. Временные сигналы и их спектры.
В случае, если сигнал – комбинация двух простейших гармонических составляющих с разными частотами и амплитудами, представленный на рис. 13 а, б, то его спектр имеет вид, представленный на рис. 13,в, где явно видно наличие двух гармонических составляющих, у которых легко определяются их частоты и амплитуды.
Виброакустический сигнал представляет собой совокупность многих составляющих акустического шума или вибрации, которые связаны с техническим состоянием оборудования. В этом случае реальный сигнал шума или вибрации содержит, как правило, сумму гармонических и случайных составляющих, представленных на рис. 14.

Рис. 14. Временной сигнал вибрации электрической машины и его спектр.
Акустическое поле в любой момент времени и в любой точке пространства полностью определяется зависимостью одной из трёх взаимосвязанных величин х, х•, Р:
- х - вектор смещения частицы среды из положения покоя;
-х• = dx/dt – вектор колебательной скорости;
- Р - звуковые давления в среде.
Каждая из этих величин в любой момент времени и в каждой точке пространства удовлетворяет волновому уравнению.
Для звукового давления волновое уравнение имеет следующий вид:
Ñ2 Р = 1/С 2о ¶2Р/¶t2,
где Ñ2 = [¶2/¶x2 + ¶2/¶y2 + ¶2/ ¶z2 ] - оператор Лапласа; Со - скорость распространения волны (скорость звука в воздухе Со » 330 м/с).
Плоская волна, представленная на рис.15 - это продольная волна, которая зависит только от одной декартовой координаты и времени.

Рис. 15. Плоская волна.
В этом случае: ¶2Р/¶y2 = ¶2Р/¶z2 = 0. Волновое уравнение продольной волны в этом случае в упругой среде без учета потерь для однородной бесконечной среды имеет вид:
¶2Р(х, t)/ ¶x2 = 1/ Со ¶2Р(х, t)/ /¶t2.
Решение этого уравнения имеет вид:
P (х, t)= Pо exp j{w (t-x/со)},
где Pо - амплитуда переменной составляющей; wt – фаза временная; w (x/со) - фаза пространственная.
В безграничной и идеальной среде скорость распространения волны со определяется только параметрами среды: Со = Ö`k/r,
где к- модуль всестороннего сжатия, Па; rо - плотность воздуха, кг/м3.
Интенсивность звука связана с давлением: J = P2/r со. Здесь r со _- волновое сопротивление, кг/(м²·с (для воздуха r со » 440 кг/(м²·с).
Главная особенность слуха человека – логарифмическая зависимость восприятия звука от величины переменного давления в воздухе. Эта особенность позволяет человеку эффективно воспринимать звук в диапазоне изменения величины до 106 … 107 раз.
Вторая особенность - чувствительность органа слуха человека зависит от частоты звука, как представлено на графике рис. 16.

Рис. 16. Кривая равной громкости А.
составляющую на определенной частоте, например, движение камертона, колебание которого представлено на рис. 17,а.

Рис.17. Природа механических колебаний.
Одновременно колебания могут развиваться на двух разных частотах - рис 17,б. Однако вибрация реального оборудования представляет собой сложные механические колебания, представленные на рис. 17,в.
В реальных условиях вибрация является сложным механическим колебанием со многими составляющими на разных частотах, которое можно охарактеризовать вибросмещением «х», виброскоростью х• = dx/dt и виброускорением х•• = d²x/dt².
Для гармонических колебаний: x(t)= хо sin (wt+φо). В этом случае виброскорость: x• (t)= хо ·w·сos (wt+φо)= xо·w·sin (wt+φо+π/2). Виброускорение:
x•• (t)=- хо·w²·sin (wt+φо)= xо·w²·sin (wt+φо+π).
Обозначим: d= xо -амплитуда перемещения, n= xо·w- амплитуда виброскорости
a= xо·w²- амплитуда виброускорения.
Как следует из графиков рис. 18 виброскорость имеет опережение фазы на 90о относительно вибросмещения, а виброускорение – на 180 о .

Рис. 18. Опережение фазы виброскорости и виброускорения относительно вибросмещения.
Виброскорость гармонических колебаний может быть определена путем деления их виброускорения на 2p¦, а вибросмещение – делением виброускорения на 4p²¦². В этом случае: n= a/2p¦ = ò a dt; d= a/4p²¦² = òn dt.
Современные виброизмерительные приборы автоматически осуществляют эти операции электронными или цифровыми интеграторами.
Следует отметить, что виброперемещение наиболее часто используется для измерения низкочастотных механических колебаний. На рис 19 представлены спектры виброперемещения, виброскорости и виброускорения асинхронного электродвигателя в логарифмическом (в децибелах) масштабе по оси Х.

Рис. 19. Спектры виброперемещения, виброскорости и виброускорения асинхронного электродвигателя.
Для шума линейными единицами измерения являются:
- паскаль (Па) – при измерении звукового давления;
- ватт на метр квадратный (Вт/м²) – при измерении интенсивности звука.
Однако, как правило, шум измеряется в относительных логарифмических единицах - децибелах (дБ). Это обусловлено удобством использования этих единиц измерения при изменении значений шума в большом диапазоне.
Уровень звукового давления, выраженный в дБ определяется следующей формулой Lp = 20 lg (P/Pnop), где Р –давление, Па; Pnop = 2·10 – 5 Па – порог слышимости человека на частоте 1 кГц.
Интенсивность звука J (Bт/ м²) связана со звуковым давлением Р:
J=Р²/(ρ·cо), (1)
где ρ· cо -волновое сопротивление; ρ – плотность среды, равная для воздуха»1,29 кг/ м3; cо » 330 м/с – скорость звука в воздухе.
Пороговые значения давления Р и интенсивности J выбраны такими, чтобы для воздуха в нормальных условиях они удовлетворяли соотношению (1), поэтому интенсивность звука и звуковое давление в воздухе, выраженные в дБ, совпадают.
Уровень интенсивности звука Lj (дБ) связан с линейными единицами:
Lj = 10 lg (J / Jnop), (2)
В этом случае: J - интенсивность звука, Вт/ м²; Jnop = 10 – 12 Вт/ м² - пороговое значение интенсивности, полученное из выражения (1).
Обычно волновое сопротивление для воздуха: ρ· cо»440 кг/(м²·с).
Для вибрации линейными единицами измерения согласно ГОСТам ИСО являются:
- мкм (микрометр) –для измерения вибросмещения,
- мм/с – для измерения виброскорости,
- м/с² – для измерения виброускорения
Вибрация может выражаться в относительных единицах – децибелах..
Тогда уровни колебаний соответственно виброперемещения, виброскорости и виброускорения (дБ), определяются следующим образом
Lх = 20 lg (Х / Хnop); (3)
Lх• = 20 lg (Х• / Х•nop); (4)
Lх•• = 20 lg (Х•• / Х••nop), (5)
где Хnop, Х•nop, Х••nop - пороговые значения.
В промышленности используется ряд значений:
Хnop» 8·10 – 12 ,м; Х•nop» 5·10 – 8,м/с; Х••nop» 3·10 – 4, м/с².
Для виброскорости пороговые значения определяются из соотношения, в котором связано давление в упругой волне со скоростью колебания частиц Х• при замене давления Р на пороговое значение давления Pnop:
Pnop = ρ· cо Х•nop (6).
Тогда для воздуха пороговое значение виброскорости равно
Х•nop» 5·10 – 8,м/с. (7).
Следует отметить, что это пороговое значение не зависит от частоты.
Пороговые значения виброперемещения и виброускорения выбираются таким образом, чтобы Хnop, Х•nop, Х••nop, измеряемые в одной точке и выраженные в дБ совпадали на частоте ¦0=1000 Гц.
В настоящее время в соответствии со Стандартом ISO -1683 рекомендуются следующие пороговые значения механических колебаний:
Хnop» 10 – 12,м; Х•nop» 10 – 9,м/с; Х•nop» 10 – 6,м/ с², приведенные не к частоте ¦0=1000 Гц, а, для получения более простых значений к круговой частоте
w0 = 1000 рад/с (¦0 » 159 Гц).
При сравнении амплитуд механических колебаний достаточно указать лишь разность соответствующих уровней в дБ, отнесенных к одному и тому же опорному значению.
На рис.20 представлен спектр колебаний (обозначен пунктиром) и общее значение амплитуды или общий уровень (обозначен сплошной линией), измеренный в широкой полосе частот.

Рис.20. Общее значение амплитуды или общей уровень колебаний в широкой частотной полосе.
измерительно – анализирующий тракт, структурная схема которого представлена на рис. 21, называется виброметром.

Рис. 21. Структурная схема прибора для измерения сигналов вибрации и шума.
высокочастотных сигналах вибрации исправного подшипника качения и подшипника с дефектом (раковиной на поверхности качения), который поясняется графиками рис.22.
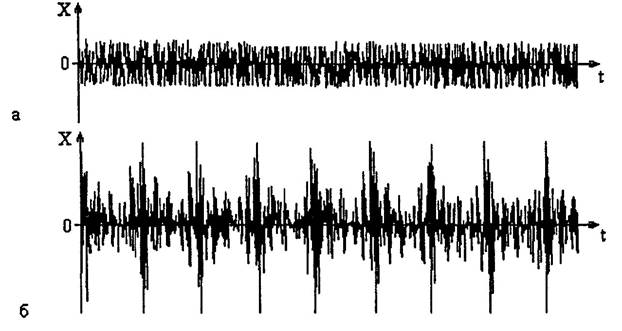
Рис. 22. Высокочастотная вибрация исправного (а) и дефектного (б) подшипников качения.
Метод ударных импульсов реализуется достаточно простым прибором, структурная схема которого представлена на рис.23.

Рис. 23. Структурная схема прибора для измерения пикфактора сигнала вибрации.
Такого типа прибор используется для обнаружения некоторых видов зарождающихся дефектов, в основном, подшипников качения.
На рис.24 представлены спектры вибрации.

Рис. 24. Спектры вибрации, измеренной с различной разрешающей способностью.
Прибор, который позволяет измерять и анализировать амплитуды или среднеквадратические значения вибрации или шума в отдельных узких полосах частот, называется анализатором спектра
Используется два типа анализаторов спектра:
1. Простейший прибор (рис.25, а), который снабжен перестраиваемым по частоте полосовым фильтром.
2. Прибор с последовательно переключаемыми фильтром (рис.25,б).

Рис. 25. Упрощенные структурные схема анализаторов, осуществляющих последовательный спектральный анализ.
Эти анализаторы позволяют осуществлять последовательный спектральный анализ, т.е. анализ по очереди в отдельных полосах или на отдельных частотах в пределах их рабочего частотного диапазона. На выходе детектора величина сигнала пропорциональна мощности вибрации в выбранной полосе частот.
В настоящее время анализаторы спектра, структурная схема которых представлена на рис. 26 осуществляют параллельный анализ, т.е. анализ, происходящий одновременно во всех полосах в пределах рабочего частотного диапазона.
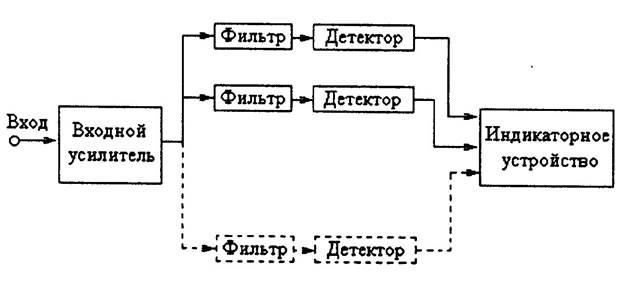
Рис. 26. Структурная схема анализатора, работающего в реальном времени и осуществляющего параллельный спектральный анализ.
Таким образом обеспечивается мгновенный частотный анализ вибрации или шума, т.е. частотный анализ в реальном времени. В этом случае результатом анализа является ряд значений или уровней, одновременно измеряемых анализатором спектра во многих относительно узких полосах частот
Амплитудно-частотная характеристика (АЧХ) идеального полосового фильтра представлена на рис. 27.

Рис. 27. Амплитудно-частотная характеристика идеального полосового фильтра.
На рис.28 представлены зависимости ширины полосы пропускания анализатора с постоянной шириной полосы пропускания от частоты при линейном (рис. 28,а) и логарифмическом (рис. 28, б) масштабах частоты.

Рис.28. Амплитудно-частотные характеристики идеальных полосовых
фильтров с постоянными абсолютными значения ширины полосы пропускания частот.
Реальные ПФ имеют АЧХ, которая отлична от характеристики идеального фильтра. АЧХ реального фильтра имеет менее крутые фронты, представленные на рис. 29.

Рис. 29. Амплитудно-частотная характеристика реального (а) и идеального (б) фильтров.
. Ширина полосы реального фильтра может быть определена двумя основными способами. Под шириной полосы реального фильтра понимают ширину полосы пропускания идеального фильтра, пропускающего такую же мощность «белого» шума, как и реальный фильтр (рис. 29, а). Значение этого параметра можно определить по точкам пересечения кривой характеристик реального фильтра и фронтов идеального фильтра, площадь которого равна площади под кривой реального фильтра (заштрихованная площадь). Этот параметр называется эффективной шириной полосы пропускания реального фильтра.
По второму способу ширина полосы пропускания реального фильтра определяется как интервал частот на уровне спада частотной характеристики фильтра на 3 дБ (рис. 29, б).
Для фильтров с постоянной абсолютной шириной полосы пропускания средняя частоты определяется как сумма верхней и нижней частоты фильтра, деленная на два: fо = (fв + fн)/2, а ширина полосы пропускания равна
Df = fв - fн, где fв и fн - верхняя и нижняя частоты фильтра, соответственно.
В анализаторах спектра «гребенка» фильтров с постоянной абсолютной шириной полосы пропускания, при линейной шкале частот имеет вид, представленный на рис. 30.

Рис. 30. АЧХ фильтров анализатора при постоянной ширине их полос пропускания.
Частотный анализ с постоянной относительной (процентной) шириной пропускания проводится анализаторами второго типа, которые имеют набор фильтров. Эти фильтры с постоянной относительной (процентной) шириной
пропускания имеют среднегеометрическая частоту, равную fо = Öfвfн, и ширину полосы пропускания, определяемую как D fотн = {[(fв - fн) ×100]/ fо}%.
На рис. 31 представлены зависимости ширины полосы пропускания анализатора с постоянной относительной шириной полосы пропускания от частоты при линейном (рис. 31,а) и логарифмическом (рис. 31, б) масштабах частоты.

Рис.31. Амплитудно-частотные характеристики идеальных фильтров с постоянными относительными значениями ширины полосы пропускания.
Использование логарифмического масштаба более эффективно. Это является одним из преимуществ в данных анализаторах. Другим преимуществом является соответствие постоянной относительной ширины полосы пропускания постоянному значению добротности, т.е. постоянному значению коэффициента усиления в области возможных резонансных пиков,
представленных на рис 32.

Рис. 32. Связь между добротностью Q и относительной шириной частотной полосы rƒотн.
Это позволяет эффективно применять анализаторы с фильтрами с постоянной относительной шириной полосы пропускания при использовании
логарифмической частотной шкалы для анализа вибрации при нестабильной частоте вращения и большом количестве резонансов в конструкции оборудования.
На практике широко используются два типа фильтра с постоянной относительной шириной полосы пропускания:
- октавный фильтр;
- третьоктавный фильтр.
Октава – это диапазон частот, в котором верхняя частота fв отличается от нижней частоты fн в два раза. В этом случае для октавного фильтра справедливо соотношение fв = 2fн, при этом для среднегеометрического значения частоты имеем fо = Öfвfн = Ö2 ´fн.
Абсолютная ширина полосы пропускания октавного фильтра равна
Df = fв - fн, а для относительной ширины полосы пропускания имеем
D fотн = {[(fв - fн) ×100]/ fо}%.= 70,7 %.
Если октавный фильтр имеет среднегеометрическую частоту fо =10 Гц, то абсолютное значение его полосы пропускания равно ∆f=7 Гц.
Если среднегеометрическая частота октавного фильтра fо =100 Гц, тогда
∆f=70 Гц.
По рекомендациям Международной электротехнической комиссии (МЭК) установлен ряд. Опорным значением частоты этого ряда является fо =1000 Гц.
Если октавную полосу разделить на три геометрически равных участка, получим третьоктавную полосу. Для октавного и для третьоктавного фильтров абсолютные значения ширины полосы пропускания увеличивается по мере роста их среднегеометрических частот, оставаясь в процентном отношении постоянными – 23% для третьоктавного фильтра и 70% для октавного фильтров. На рис. 33 приведена «гребенка» фильтров третьоктавного анализатора с логарифмической шкалой частот.
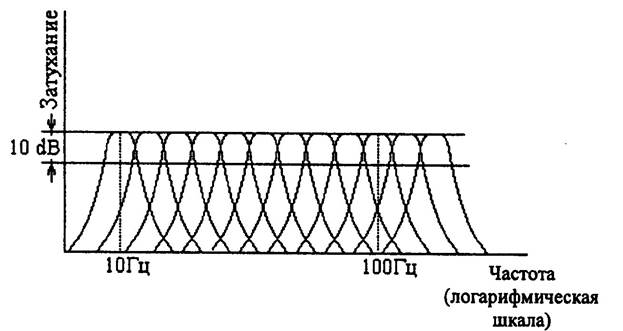
Рис. 33. АЧХ смежных третьоктавных фильтров с логарифмической шкалой частот.
Для решения задач мониторинга технического состояния и диагностирования роторного оборудования октавный и особенно третьоктавный анализы вибрации имеет большое значение и широко используется. Однако, для многих практических задач мониторинга и диагностики требуется анализ вибрации в узких полосах частот, чтобы не пропустить рост определённых ее составляющих или появление новых составляющих при возникновении неисправностей и дефектов в объекте контроля.
Для определения оптимальной ширины полос пропускания частот можно использовать эмпирическое правило: возможный диапазон изменения частоты вращения оборудования может находиться в пределах ±10%. В этом случае изменение частоты в одну сторону составляет 10% и изменение частоты в другую сторону – тоже 10%. Итого 20%, а ширина полосы пропускания третьоктавного фильтра – 23%, что во многих случаях удовлетворяет требованиям к контролю уровней шума и вибрации оборудования.
Однако, часто использование октавных и третьоктавных анализаторов является недостаточным с точки зрения их разрешающей способности. Поэтому на практике, особенно для мониторинга и глубокой диагностики оборудования, широко используется узкополосный спектральный анализ, так как он позволяет получить большой объём диагностической информации.
В бездефектных узлах трения стационарна и случайная высокочастотная вибрация, её мощность постоянна во времени. При наличии дефектов величина сил трения и мощность вибрации изменяется во времени, т.е. появляется модуляция мощности высокочастотной вибрации, характер сигнала которого представлен на рис. 34.

Рис. 34. Случайный амплитудно-модулированный сигнал.
В этом случае глубину модуляции m сигнала можно определить в процентах:
m = {[Xmax (t) - Xmin (t)]/ [Xmax (t) + Xmin (t)]}100%,
где Xmax, Xmin - максимальное и минимальное значения огибающей сигнала соответственно.
Следует отметить, что при изменении вида дефекта частота модуляции изменяется, а чем больше степень развития дефекта, тем больше становится глубина модуляции. Таким образом, вся информация о техническом состоянии содержится в огибающей высокочастотного сигнала, а частота модуляции определяет вид дефекта, а глубина модуляции – степень его развития. На рис. 35 представлены временные сигналы вибрации подшипников качения.

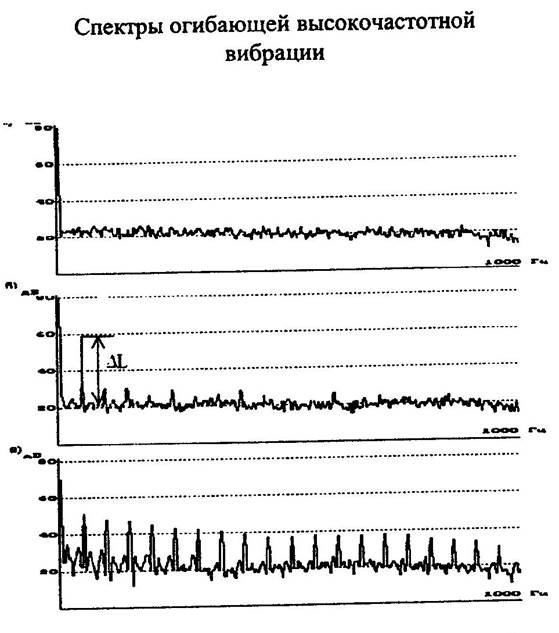
Рис. 35. Временные сигналы высокочастотной вибрации подшипников качения и спектры ее огибающей: а- исправный подшипник; б – подшипник с износом поверхности трения; в – подшипник с раковиной на поверхности качения.
Структурная схема анализатора спектра огибающей высокочастотной вибрации представлена на рис. 36, её отличие – наличие полосового фильтра детектора огибающей.

Рис. 36. Упрощенная структурная схема анализатора спектра огибающей высокочастотной вибрации.
Другой путь формирования спектра огибающей высокочастотной вибрации – использование преобразования Гильберта для получения огибающей с дальнейшим преобразованием Фурье для получения спектра огибающей высокочастотной вибрации.
К достоинствам метода спектрального анализа огибающей следует отнести:
- возможность локализации дефекта;
- высокая чувствительность;
- высокая достоверность определения вида и величины каждого дефекта;
- возможность постановки диагноза и прогноза по однократным измерениям вибрации.
В таблица 4 представлены четыре основных вида нагрузки в подшипниках качения.
Таблица 4.

Наиболее широко распространены преобразователи шума конденсаторные или электростатические микрофоны. Этот параметрический преобразователь звукового давления в электрический сигнал работает от источника постоянного напряжения, представлен на рис.37.

Рис. 37. Схема микрофона.
Тонкая никелевая мембрана, закрепленная параллельно проводящему основанию, образуют совместно с ним конденсатор емкостью C(x). Последовательно к конденсатору C(x) включены конденсатор C(0) и источник постоянного напряжения e. В этом случае переменное Uвых(t), пропорционально величине переменного давления воздуха P(t), снимается с емкости Cо.Определим связь перемещения мембраны х(t) с действующим на нее звуковым давлением P(t) следующим образом.
По закону Гука, сила, действующая на мембрану, равна F= kx(t), где k - жесткость мембраны; x(t) – смещение мембраны под действием звукового давления.
С другой стороны, для этой силы справедливо следующее выражение F= P(t)•S, где S- площадь мембраны. Тогда kx(t) = P(t) •S, отсюда x(t) = P(t) •S/ k. Следовательно, перемещение мембраны x(t) прямо пропорционально величине звукового давления P(t).
Для определения связи выходного напряжения Uвых(t) от перемещения x(t) мембраны рассмотрим эквивалентную схему микрофона, представленную на рис. 38.

Рис. 38. Эквивалентная схема конденсаторного микрофона.
Для выходного напряжения в соответствии с эквивалентной схемой микрофона имеем Uвых(t)= e C(x) / (C(x) + Co).
При отсутствие перемещения мембраны емкость конденсатора определяется следующим выражением C(x=о) = eоeS/dо, где eо = 8,85×10-12 Ф/м - диэлектрическая проницаемость воздуха; e - относительная диэлектрическая проницаемость; dо – зазор между проводящим основанием и мембраной в исходном состоянии.
При действии звукового давления емкость конденсатора C(x) определяется выражением C(x) = eоeS/[dо - x(t)], где x(t) – смещение мембраны под действием звукового давления.
Максимальная чувствительность микрофона достигается при условии
Cо º С`(х). В этом случае после преобразований соотношений для выходного напряжения микрофона получим следующее приближенное соотношение
U-вых ~ P(t), т.е. переменная составляющая выходного напряжения микрофона прямо пропорцио

