




ВЫПУСКНАЯ КВАЛИФИКАЦИОННАЯ РАБОТА
По специальности 25.02.03
Техническая эксплуатация электрифицированных и пилотажно-навигационных
Комплексов
ТЕМА: Приборы измерения пространственного положения и направления полета в условиях технической эксплуатации информационно-измерительных приборов, систем и комплексов.
Выполнил: Королёв С.С.
Руководитель: Родькин П.А
Рецензент: Кириллов А. И.
Содержание:
1. Введение
2. Общая часть
3. Инерциальная система
4. Резервные приборы
Введение.
Приборы измерения пространственного положения и направления полёта предназначены для вычисления параметров пространственного положения и навигационных параметров воздушного судна с целью однозначного восприятия экипажем воздушной обстановки, положения воздушного судна и режима полёта, а также для совместной работы с оборудованием автоматического управления полётом. Параметры, вычисляемые приборами измерения пространственного положения и направления полёта:
— пространственное положение в текущий момент времени,
— путевая скорость
— курсовой угол
— текущие значения направления и силы ветра,
— угол сноса
— боковое отклонение от курса
— отклонение от линии заданного пути,
— расчетный курс
— значения текущих навигационных характеристик,
— требуемые навигационные характеристики в соответствии с режимом полёта
— инерциальная вертикальная скорость
— магнитный и истинный курс. На основе перечисленных параметров в соответствии с трёхмерной системой координат для позиционирования на Земле (WGS-84) рис 1. система приборов измерения пространственного положения и направления полёта вычисляет пространственное положение самолёта.
WGS-84 (англ. World Geodetic System 1984) — всемирная система геодезических параметров Земли 1984 года, в число которых входит система геоцентрических координат. В отличие от локальных систем, является единой системой для всей планеты. Предшественниками WGS 84 были системы WGS 72, WGS 66 и WGS 60.
WGS 84 определяет координаты относительно центра масс Земли, погрешность составляет менее 2 см. В WGS 84 нулевым меридианом считается опорный меридиан проходящий в 5,31″ (~100 м) к востоку от Гринвичского меридиана.


Рис 1.
Общая часть.
Приборы измерения пространственного положения и направления полёта включают в себя подсистемы:
Инерциальная система:
Инерциальная системарис.2 предназначена для определения параметров пространственного положения, географических координат и параметров движения воздушного судна, передачи их бортовым системам и отображения на дисплеях системы электронной индикации кабины экипажа. В состав инерциальной системы входят:
—три инерциальных вычислителя,
— три модуля конфигурации инерциального вычислителя.
Резервные приборы.
Резервные приборы рис.3 обеспечивают экипаж информацией о магнитном курсе, пространственном положении самолёта, высоте и воздушной скорости, рассчитываемых независимо от других систем самолёта. При обнаружении расхождения в значениях курса, тангажа, крена, высоты и воздушной скорости на дисплеях командира воздушного судна и второго пилота информация от резервных приборов может быть использована для определения неисправной системы или в качестве основной при отказе инерциальных систем и систем воздушных сигналов.
В группу резервных приборов входят:
—комплексный электронный резервный прибор
—магнитный компас.
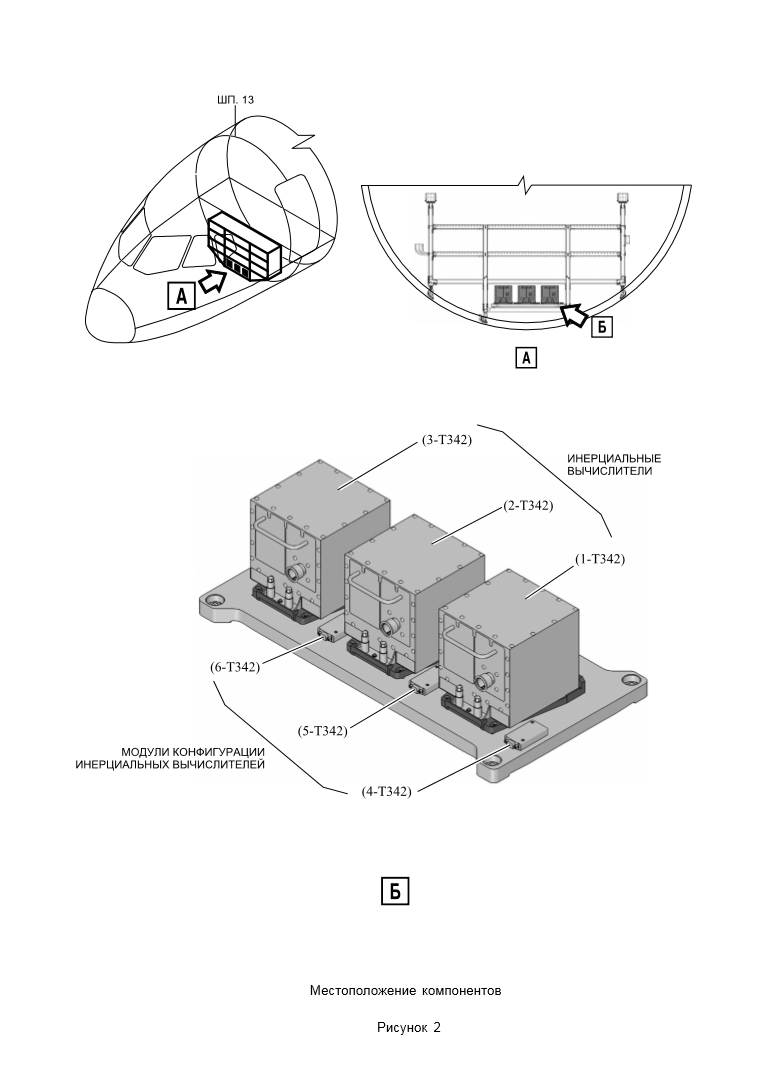
Рис 2.
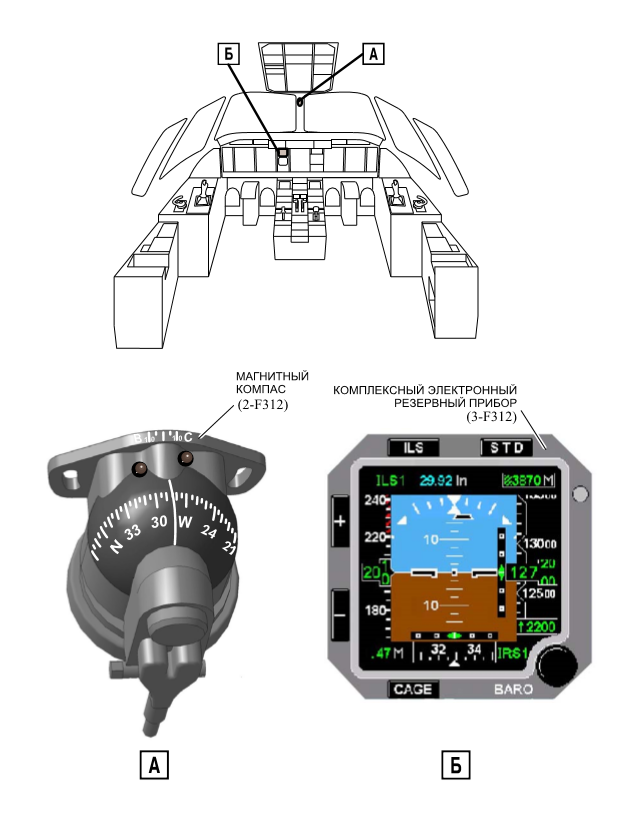
Рис 3.
Описание функций инерциальной системы.
Инерциальная система при вычислении параметров пространственного положения и направления полёта взаимодействует с самолётными системами и получает данные непосредственно от датчиков или вычислителей. В зависимости от используемой системы координат, инерциальная система выдает в системы самолёта следующие данные: В связанной системе координат:
— Продольное, поперечное и нормальное ускорение. – Угловые скорости по крену, тангажу и рысканию. В местной системе координат: — тангаж и крен,
— угловые скорости изменения тангажа и крена,
— угол наклона траектории полёта и линейное ускорение вдоль траектории полёта, — бароинерциальная вертикальная скорость и инерциальное вертикальное ускорение,
— курс платформы. В земной системе координат:
— широта и долгота,
— путевая скорость, северная и восточная составляющие путевой скорости,
— бароинерциальная высота
— истинный и магнитный курс,
— истинный и магнитный путевой угол,
— угловая скорость изменения путевого угла,
— истинная скорость и истинное направление ветра,
— угол сноса,
— ускорение вдоль линии пути и перпендикулярно линии пути;
— ускорение по курсу и перпендикулярно курсу. Перечисленные параметры передаются по шине ARINC 429.
Режимы работы инерциальной системы:
— включение,
— стационарная выставка,
— навигация,
— пространственное положение (резервный режим),
— окончание полёта.
Инерциальный вычислитель.
Инерциальный вычислитель рис.4 состоит из шасси и переднего кожуха, внутри которых установлены три основных компонента:
— блок инерциальных датчиков;
— источник вторичного питания с платой защиты от электромагнитных помех и переходных процессов;
— плата вычислителя и интерфейса ввода/вывода ARINC. Блок инерциальных датчиков состоит из трёх цифровых лазерных гироскопов и трёх компенсационных акселерометров, каждый из компонентов оснащён собственной электроникой, что позволяет изолировать его от неисправностей в соседних датчиках. Цифровой кольцевой лазерный гироскоп GG1320 производства компании Honeywell представляет собой современный полностью автономный датчик. В инерциальном вычислителе используется акселерометр Q-FLEX QA950 производства компании Honeywell. Встроенная электроника генерирует выходной ток, пропорциональный ускорению, что обеспечивает измерение как статических, так и динамические ускорений. Источник вторичного питания включает в себя преобразователь напряжения с двумя входами для питания постоянным током напряжением 28 В и плату фильтров электромагнитных помех и защиты от переходных процессов. Фильтрация электромагнитных помех осуществляется в запатентованной «камере электромагнитных помех», которая является неотъемлемой частью переднего кожуха. В вычислителе и плате ввода/вывода ARINC использованы технологии существующих изделий компании Honeywell, прошедших сертификацию Федерального авиационного агентства США и европейского сертификационного центра. Микропроцессор и специализированные интегральные микросхемы (ASIC) опробованы в других коммерческих применениях. Программное обеспечение сертифицировано в соответствии с DO-178B, уровень A. Плата вычислителя и интерфейса ввода/вывода ARINC разработана с учётом возможности расширения объёма памяти и пропускной способности.

рис.3

