




ѕри разработке систем оптимальных по быстродействию учитываетс€ только 1-ое ограничение, происходит накладка на уравнение:











ќтработаем угол за мин врем€ за ограничительный момент.

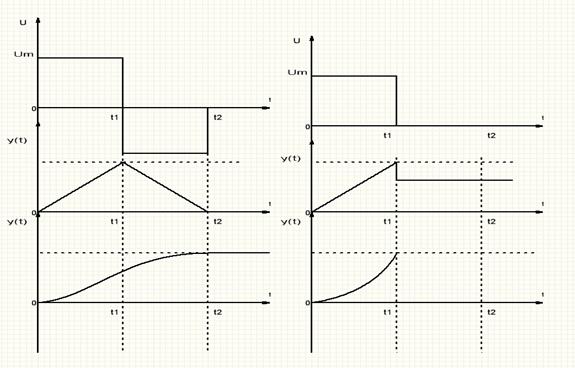
—ущность теоремы ‘ельдбаума об n-интервалах заключаетс€ в следующем: если корни характеристического уравнени€ объекта действительны или нулевые, то дл€ получени€ оптимальных процессов по быстродействию необходимо n-интервалов объекта дл€ управлени€, где n-пор€док управлени€. Ќа интервалах управлени€ примем максимальным, n-1 моментов переключений.
ћомент переключени€ определ€етс€ по принципу построени€ системы, т.к. системы дел€тс€ на:
1)–азомкнутые
2)«амкнутые
¬ разомкнутой —ј” моменты переключени€ определ€ютс€ функцией времени.
¬ замкнутых —ј” моменты переключений определ€ютс€ функцией координат объекта.
33. ѕостроение замкнутых систем оптимальных по быстродействию.
≈сли управление формируетс€ в координатах объекта, то така€ система замкнута€, но само управление носит релейный характер. ¬ замкнутой системе не надо определ€ть времена переключений управлени€.
ќдин из принципов построени€ замкнутых систем основан на использовании фазовых траекторий.
–ассмотрим данный метод:
 ;
;  ;
;
 ;
; 
 ;
;
 ;
;

ƒл€ построени€ фазовых траекторий необходимо исключить врем€ t. ƒл€ этого необходимо чтобы выражение  разделить на второе , получим:
разделить на второе , получим:
 ;
;
 ; (82).
; (82).
Ќа первом интервале управление положительное, а на втором отрицательное. ≈сли управление формируетс€ функцией времени, то система разомкнута€.
»нтегрируем выражение (82) на первом интервале:
 ,
,
 ;
;  ;
;
 ;
;  ;
;
 .
.
Ќа первом интервале получим:

Ќа втором интервале интегрируем, получаем:
 ;
;
 ;
;
 .
.
ѕереключение управлени€ происходит в точке ¬ и линии переключени€ наход€тс€ в точке 2 (по траектории 2 объект достигает заданного значени€, т.е. 2 €вл€етс€ линией переключени€).
“раектори€ переключени€ управлени€:
 ;
;  ;
;
 ;
;  ;
;
 -оптимальное, оно обусловлено:
-оптимальное, оно обусловлено:
 .
.
ќбъект будет иметь вид (он второго пор€дка, т.е. объект 2 пор€дка):



Ќарисованна€ система будет работать только при положительном управлении, дл€ отрицательного управлени€ схему преобразовывают следующим образом:

’2-контролирует положит. » отрицательные сигналы.
–ассмотрим ситуацию, когда ’3 измен€етс€ по линейному закону, это соответствует позиционной системе:

≈- это ошибка, составим уравнение, сост. дл€ ошибки регулировани€:
 ;
;
 ;
;  ;
;  ;
;  ;
;
 ;
;
 ;
;
 ;
;  ;
;
 ;
;  ;
;  ;
;
 .
.
Ќа первом интервале управление положительное. «апишем первый интервал:
 ;
;  ;
;
 (83)
(83)
«апишем второй интервал:
 (84)
(84)
¬ точке пересечени€ траектории (83)-(84) должно происходить переключение траектории и на (84) происходит возврат в начальную точку, когда ошибка пересечени€ равна нулю.
 ;
;
 ;
;  ;
;
 .
.
|
|
|
—труктурна€ схема будет иметь вид:


