




1.4.1. Зрівноваження висот окремого нівелірного ходу
Розглянемо спочатку зрівноваження окремого нівелірного ходу, прокладеного між двома реперами старших класів. У першій частині курсу подано спосіб зрівноваження перевищень такого ходу. Розглянемо можливість безпосереднього зрівноваження висот. Нехай маємо виміряні та обчислені середні перевищення із прямих та зворотних ходів між усіма сусідніми реперами ходу, а відомі тільки висоти кінцевих реперів. Необхідно визначити висоти усіх новозакладених реперів. Припустимо, ми, користуючись висотою початкового репера Нп та середніми перевищеннями, обчислимо приблизні
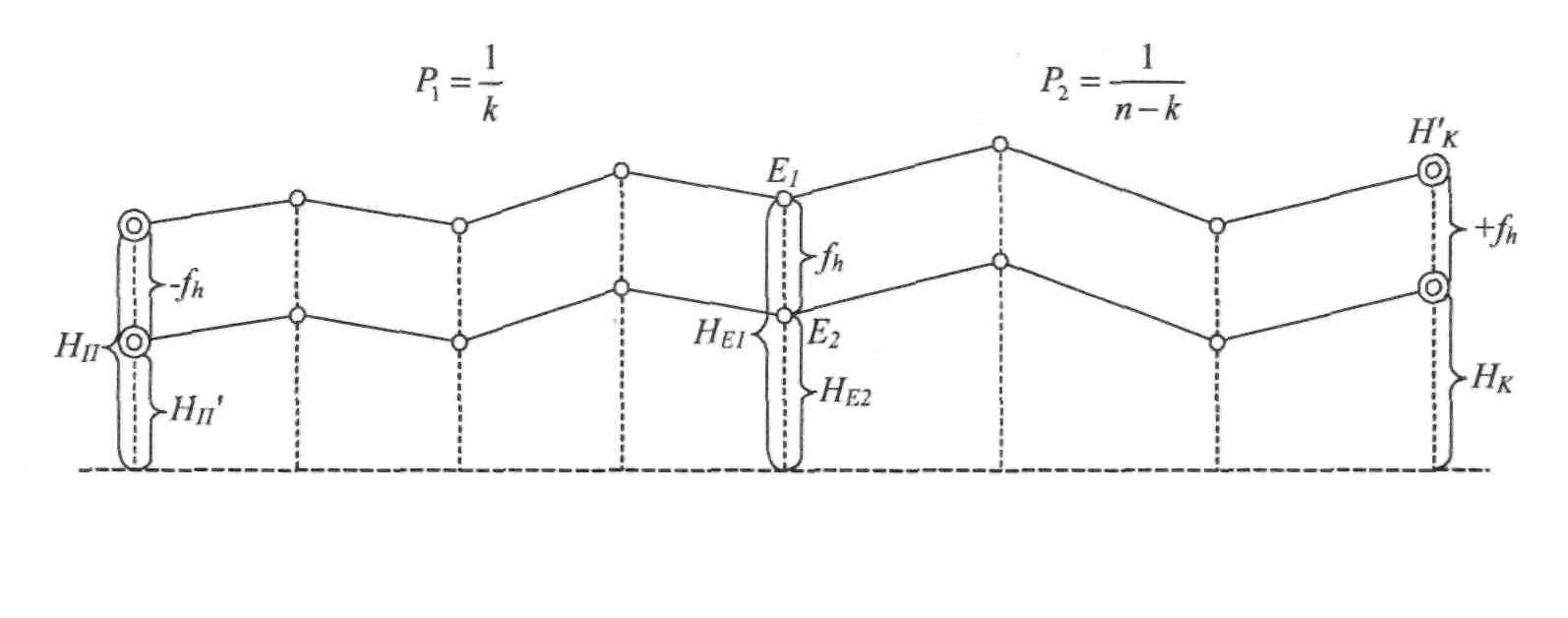
висоти всіх проміжних реперів, зокрема й кінцевого репера, висота якого Нк -відома. Отримаємо нову висоту цього репера Н'к. А потім навпаки, користуючись висотою Нк, обчислимо ще раз наближені висоти всіх інших реперів, зокрема й початкового репера. Одержимо нову висоту цього репера Н'п. За результатами цих даних побудуємо подвійний профіль, поданий на рис. 1.4.1.
Різниця Н'к -Нк =+ff, являє собою нев'язку ходу Rpn -RpK. Одночасно Н'п -Нп =-fh - теж нев'язка, але ходу RpK -Rpn. Як це видно з подвійного профілю, для всіх реперів отримано дві висоти. Різниця висот цих реперів дає нев'язку. Для репера Е
 (1.4.1)
(1.4.1)
Розділ І
|
Рівнева поверхня Рис. 1.4.1. Подвійний профіль нівелірного ходу Знайдемо найімовірнішу, тобто середньовагову висоту цього репера НЕ:
|
(1.4.2)
Нехай кількість штативів у ході до репера Е дорівнює к. Якщо всього у ході п штативів, тоді кількість штативів від репера Е до кінцевого репера дорівнює п-к. За ваги цих двох частин ходу приймемо величини, обернені до кількості штативів у цих частинах ходу, тобто

|
1 „ 1
к п-к
Крім того, на основі рис. 1.4.1, можемо записати:
| (1.4.3) |
Підставивши значення НЕ із (1.4.3) у (1.4.2), отримаємо:

|
нБі Рх +нЕх р2-л-р2 _нЕі(р1+р2)-л-р2
Р1+Р2 Поділивши почленно чисельник на суму (Р{ + Р2), одержимо:

|
(1.4.4)
Перетворимо дріб
рї+р2
| п-к |
| Р]+Р2 1 1 п-к + к |
п-к ж п-к ^ к(п-к) _к
п п(п-к) п
к п-к к(п-к) к(п-к)
Висотні геодезичні мережі

|
Р7 к
Підставивши значення---- — = — у (1.4.4), матимемо кінцеву формулу:
Рх + Р2 п
 (1.4.5)
(1.4.5)
Оскільки репер Е вибрано довільно, то ця формула придатна для обчислення найімовірнішої висоти будь-якого репера. На підставі формули можна сформулювати правило таких обчислень: зрівноважена висота будь-якого репера дорівнює наближеній висоті, отриманій за середніми перевищеннями плюс поправка, яка дорівнює нев 'язці ходу, взятій з оберненим знаком, поділеній на кількість станцій у всьому ході і помноженій на кількість станцій до цього репера.
Під час обчислення поправок у наближені висоти доцільно нев'язку, взяту
f з оберненим знаком, розділити на п, тобто отримати постійний коефіцієнт —, а
п
потім цей коефіцієнт множити на змінну k - кількість станцій до репера, висоту якого визначають.
Визначимо найслабше місце ходу, тобто місце, де висоти реперів визначаються з найбільшою похибкою. Висота кожного з реперів обчислювалась два рази: від початкового та від кінцевого репера і наприклад, для репера Е, висоти
нех та НЕ2 ■
Середнє значення висоти Нсер, отримане з вагою Р, що дорівнює сумі ваг
Рх та Р2, тобто: Р = Рх + Р2, або:
 (1.4.6)
(1.4.6)
Найбільшу похибку у висоті буде мати репер, вага якого Р - найменша. Відповідно до (1.4.6) Р буде мінімальним, якщо знаменник к(п - к) буде максимальним. Отже, маємо задачу на екстремум функції. Позначимо знаменник:
 (1.4.7)
(1.4.7)
Візьмемо першу похідну по к та прирівняємо її до нуля:
— = п-2к-0. Звідси: dk
 (1.4.8)
(1.4.8)
Отже, найслабше місце ходу - його середина.
Розділ І
1.4.2. Зрівноваження нівелірної мережі з однією вузловою точкою
Нехай маємо мережу із трьох ходів, що сходяться в одну вузлову точку (рис. 1.4.2). На рисунку подані виміряні перевищення A,, h±, h3 та довжини
ходів Јj, L2, Zg, а також висоти реперів А, В, С - НА, Нв, Нс. Стрілками показані напрямки збільшення висот, тобто, напрямки додатних перевищень.
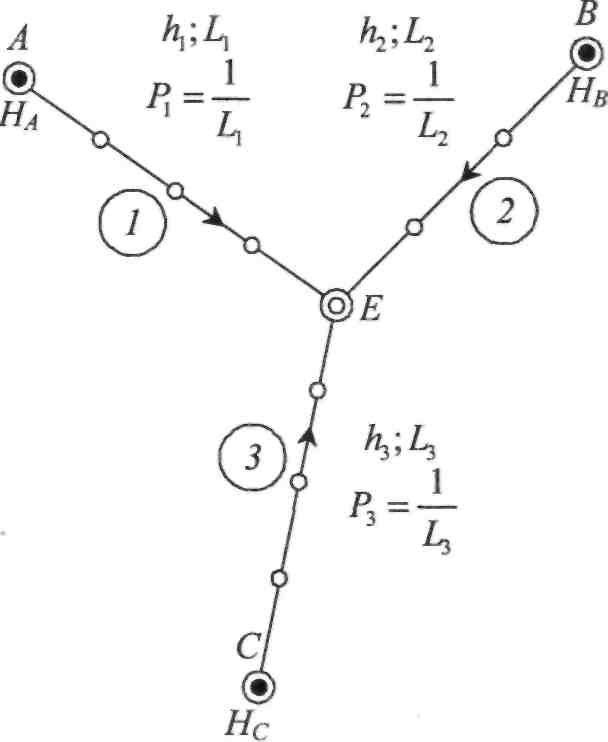
Рис. 1.4.2. Нівелірна мережа із трьох ходів, що сходяться в одну вузлову точку
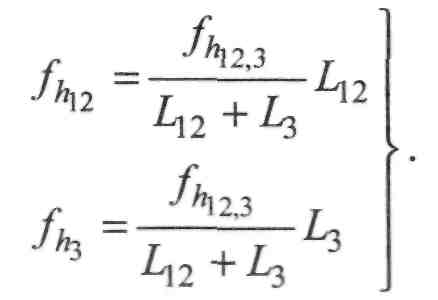
Визначимо ваги ходів, як величини, обернені до довжин ходів. Ваги також подано на рисунку. Маємо можливість визначити три значення висоти точки Е: з першого, другого та третього ходів:

Знайдемо середнє вагове значення висоти точки Е:
 (1.4.9)
(1.4.9)
Далі, знаючи зрівноважену висоту вузлової точки НЕ, знайдемо нев'язки кожного з ходів: /V, fh, /L за формулами

Подальше зрівноваження кожного із цих ходів можна виконати описаним вище методом. Залишається оцінити точність нівелювання за результатами
Висотні геодезичні мережі
зрівноваження. Знайдемо середню квадратичну похибку одиниці ваги - [і для випадку, коли у одну вузлову точку сходяться п - ходів. Тоді, як відомо,
|
(1.4.10)
де (и-1)- кількість надлишкових ходів; Pt- ваги ходів; Vt— поправки ходу, отримані зі зрівноваження.
Щоб знайти висоту точки Е, достатньо прокласти один хід.
Якщо  , то (Д. - похибка ходу, завдовжки у 1 км; якщо ж
, то (Д. - похибка ходу, завдовжки у 1 км; якщо ж  , де
, де
С - довжина деякого ходу, км, то  ; у цих двох випадках похибка
; у цих двох випадках похибка

|
|
| нівелювання на одній станції \іс |
_; якщо ж Р = —, то ц - похибка
|
л/10 Щ

|
|
| (J. - похибка ходу, що має С станцій; \іст = -j=. В останньому випадку по- |
нівелювання на одній станції. Тоді, (j.^ =[істу/\0. Нарешті, якщо Pt =—, то
|
хибка ходу, завдовжки в 1 км становитиме: ц^ = —== VI0.
Похибку визначення висоти вузлової точки Е знаходять за формулою
|
(1.4.11)
1.4.3. Зрівноваження перевищень нівелірних мереж методом еквівалентної заміни
Візьмемо нівелірну мережу, показану на рис. 1.4.3. Мережа має чотири вузлові точки А, В, С,D. Висоти цих точок невідомі. Між вузловими точками прокладено шість ходів. У ходах виміряні перевищення hx, fy,...,h6. Відома кількість станцій ходів щ, п2, —,п6. Це дає змогу обчислити ваги усіх ходів,
тобто міру їхньої надійності 
Введемо поняття еквівалентного нівелірного ходу. Еквівалентним ходом називають такий уявний хід, вага якого дорівнює сумі ваг наявних ходів, які замінені еквівалентним.
Розділ І
Розглянемо послідовність зрівноваження перевищень, із використанням еквівалентних замін дійсних, існуючих ходів.
Hi
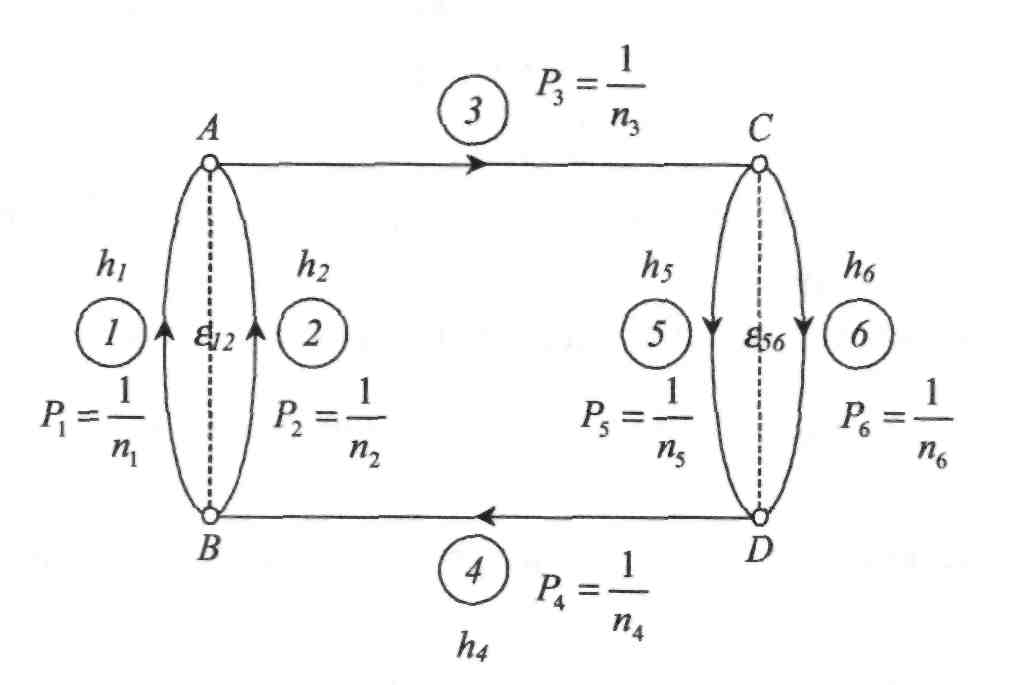
Рис. 1.4.3. Зрівноваження перевищень нівелірної мережі методом еквівалентної заміни
1. Замінимо ходи 1 і 2 еквівалентними ходами є,2 та ходи 5 і 6 еквівалентним ходом є56.
2. Обчислимо ваги еквівалентних ходів:
|
(1.4.12)
3. Знайдемо кількість станцій еквівалентних (уявних) ходів. Оскільки  , то
, то 
|
Оскільки ми знаємо ваги еквівалентних ходів, то можемо знайти кількість станцій у цих ходах:
| (1.4.13) (1.4.14) (1.4.15) |
4. Визначимо перевищення еквівалентних ходів як середні вагові:
|
_hxPl +^P2
Р\+Рг ;
Висотні геодезичні мережі
Після заміни ходів 1, 2 - еквівалентними ходами є12, та ходів 5, 6 -еквівалентним ходом є56, мережа перетворилася на зімкнений хід - полігон.
5. Знайдемо нев'язку полігона fh та кількість станцій полігона -я:
(1.4.16)  (1.4.17)
(1.4.17)
6. Визначимо нев'язки чотирьох ходів, що залишилися після заміни:
еквівалентних є12, Є56 та існуючих -3,4:
|
(1.4.18)
|
7. Знаючи нев'язки ходів 3 і 4, знайдемо їхні зрівноважені перевищення як поодинокі ходи:
(1.4.19)
H4 зв - h4 /Л4 j
8. Аналогічно знайдемо зрівноважені перевищення еквівалентних ходів:
| (1.4.20) (1.4.21) (1.4.22) |
9. Визначимо нев'язки ходів 1 і 2 та 5 і 6:
10. На рисунку не показано, але в кожному із шести ходів є репери. Тепер,
коли ця мережа розділилась на шість незалежних ходів і відомі нев'язки цих
ходів, то надалі урівноважують перевищення між цими реперами, пропорційно
до ваг частин ходів між суміжними реперами. Ці ваги обернено пропорційні до
кількості станцій у секціях. Зрівноваження закінчують оцінкою точності
результатів. Похибку одиниці ваги знаходять за формулою
|
(1.4.23)
де п - кількість всіх ходів; к - кількість вузлових точок.
Розділ І
Різниця г = (п-к) дає кількість надлишкових ходів. У нас: г = 6-4 = 2. Мережа має два надлишкові ходи.
1.4.4. Зрівноваження висот нівелірних мереж методом еквівалентної заміни
Методом еквівалентної заміни можна зрівноважувати не тільки перевищення, але й висоти точок, числові величини яких називають відмітками.
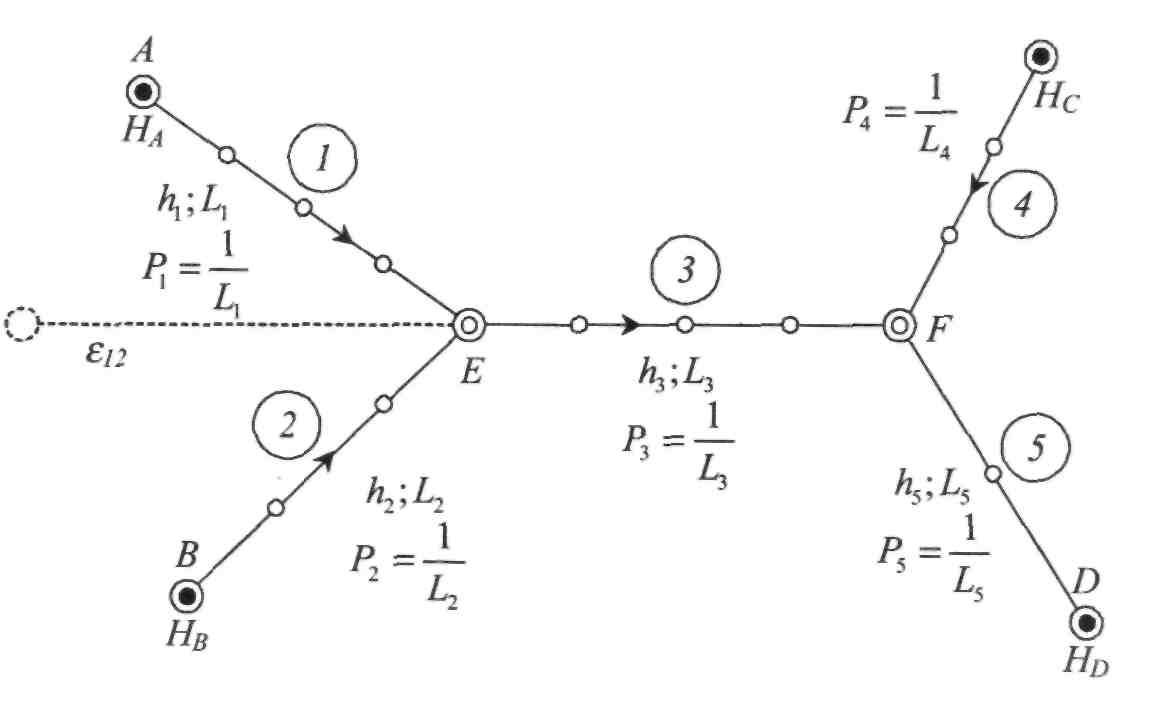
Нехай маємо мережу з п'яти ходів із двома вузловими точками (рис. 1.4.4).
|
С h,;L4
Рис. 1.4.4. Нівелірна мережа із двома вузловими точками
Відомі висоти чотирьох реперів, які прийнято називати твердими, оскільки ці репери під час зрівноваження не отримують поправок; відомі також перевищення та ваги ходів. Розглянемо послідовність зрівноваження.
|
1. Замінимо ходи 1 та 2 еквівалентним ходом є12 і знайдемо висоту вузлової точки Е з двох ходів, точніше, з еквівалентного ходу:
{HA+hx)Pl+(HB+h2)P2
| (1.4.24) (1.4.25) (1.4.26) |
//іт — -
pl+p2

|
2. Знайдемо вагу та довжину еквівалентного ходу є12:
Рп=Рх+Р2,
3. Визначимо висоту точки F з еквівалентного ходу єІ2 та ходу 3:

|
Нпз=Нп+И3. (1.4.27)
Висотні геодезичні мережі
Тепер, по суті, ми маємо мережу з однією вузловою точкою - F. Знайдемо найімовірніше значення висоти цієї точки:
(1.4.28)
де
 (1.4.29)
(1.4.29)
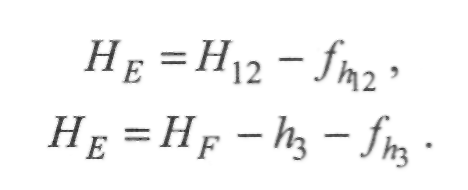
4. Знаючи зрівноважене значення висоти точки F, знайдемо нев'язки
ходів, що сходяться у цій точці:
(1.4.30)
(1.4.31) 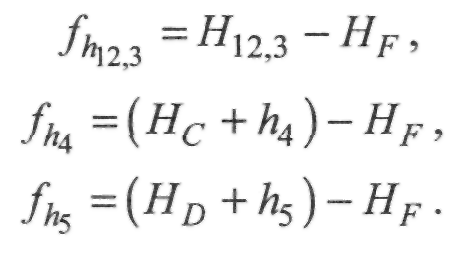 (1.4.32)
(1.4.32)
|
| (1.4.33) |
5. Розділимо нев'язку /і -і- на нев'язки еквівалентного ходу є12 та ходу
З, враховуючи довжини цих ходів:
6. Тепер є можливість розрахувати зрівноважену висоту точки Е - НЕ з
контролем:
(1.4.34)
(1.4.35)
| (1.4.36) |
7. Залишається знайти 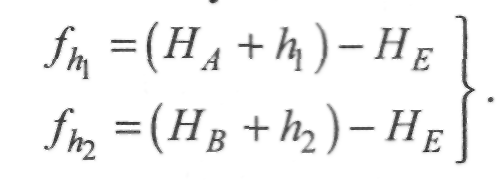
 нев'язку початкових ходів 1 та 2:
нев'язку початкових ходів 1 та 2:
Оцінку точності виконують, як звичайно.
1.4.5. Зрівноваження нівелірних мереж способом послідовних наближень (спосіб вузлів)
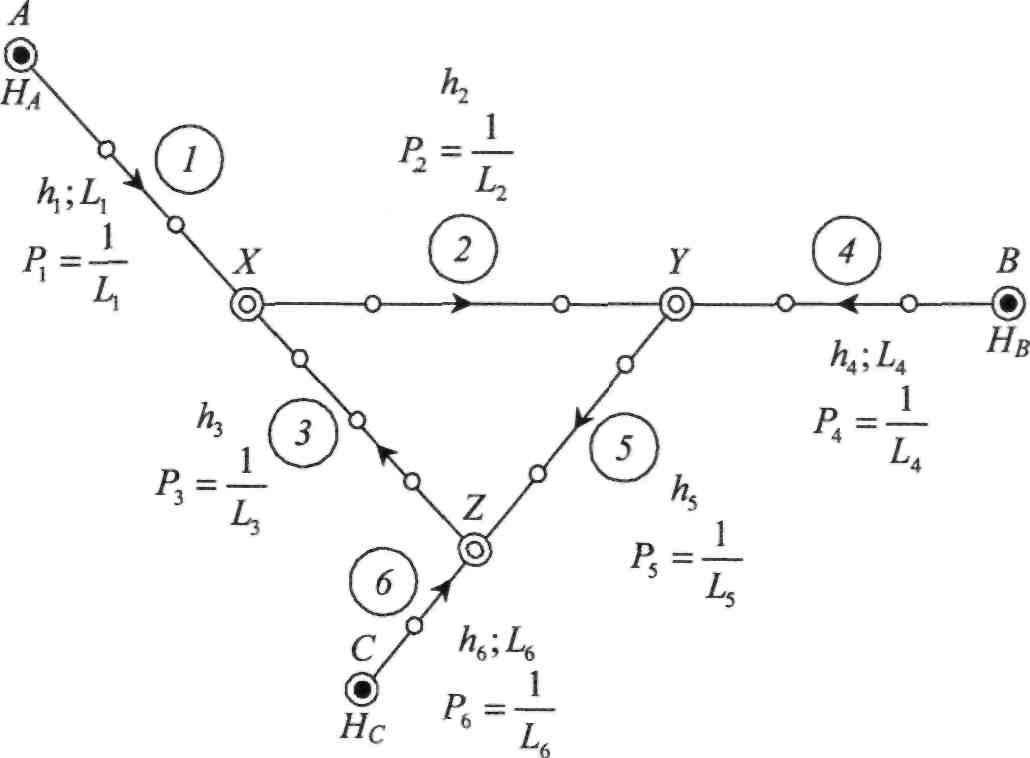
Розглянемо застосування цього способу для мережі, що складається із шести ходів, які створюють три вузлові точки (рис. 1.4.5). Відомі перевищення та довжини ходів, висоти трьох реперів, обчислені ваги ходів.
Розділ І
|
Рис. 1.4.5. Нівелірна мережа з трьома вузловими точками
Припустимо, що у якийсь спосіб знайдено висоти вузлових точок X, Y, Z. Але, якщо визначено висоти цих точок, то для кожного ходу можна скласти рівняння похибок.
Врахуємо, що кожен хід має певну вагу. Тому припишемо цим рівнянням ваги ходів - Рі:
| (1.4.37) |
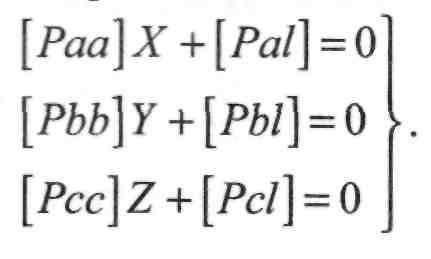
Як відомо з методу найменших 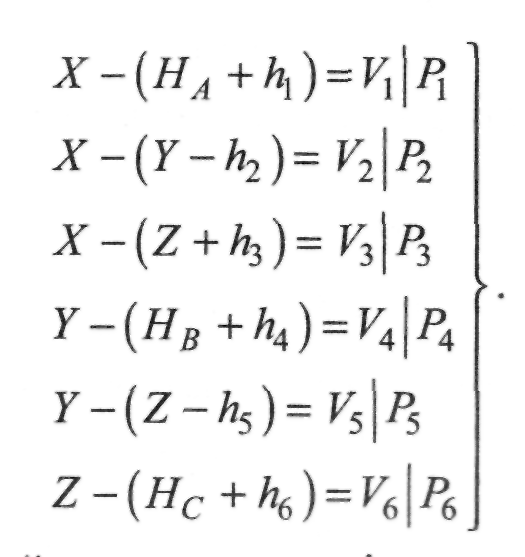 квадратів, якщо рівняння похибок розв'язувати згідно з умовою [PW] = min, то приходимо до нормальних рівнянь,
квадратів, якщо рівняння похибок розв'язувати згідно з умовою [PW] = min, то приходимо до нормальних рівнянь,
| (1.4.38) |
яких буде стільки, скільки невідомих. Невідомими фактично є висоти вузлових точок X, Y, Z. Загалом нормальні рівняння для нашої мережі запишуться так:
Висотні геодезичні мережі
У нормальних рівняннях прийнято позначати: а,- - коефіцієнти у рівняннях похибок при першому невідомому (перше невідоме -X), ^-відповідні коефіцієнти при другому невідомому - Y;ct- при третьому невідомому - Z. Як видно з (1.4.37), коефіцієнти при X, Y, Z - одиниці, тобто:
а. = 6. = с,- = 1;
/(- - вільні члени, відомі частини рівнянь:

Перше нормальне рівняння системи (1.4.38) у розгорнутому вигляді запишеться так:
 (1.4.39) Розв'яжемо це рівняння відносно невідомого X:
(1.4.39) Розв'яжемо це рівняння відносно невідомого X:

|
{HA+hl)Pl+{Y-hi)P2+{Z + hi)P3
(1.4.40)
Рх + Р2 + Р3
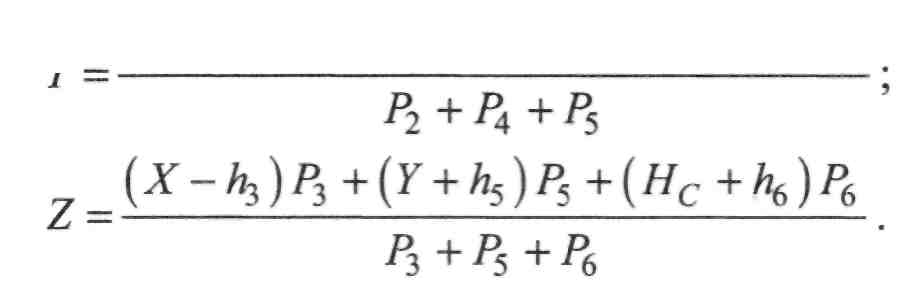
Аналізуючи (1.4.40), зауважимо, що невідоме X визначається як середнє вагове з трьох ходів, що сходяться у вузлову точку. Тепер, не записуючи інші два нормальні рівняння в розгорнутому вигляді, можемо, за аналогією з (1.4.40), записати формули для знаходження невідомих Y та Z:
|
v {X + hl)P2+{HB+hA)P,+{Z-h5)P5
(1.4.41)
(1.4.42)
Оскільки у (1.4.40), (1.4.41), (1.4.42) є невідомі, як у лівій, так і в правій частині, то безпосереднє розв'язання цих рівнянь неможливе. Справді, наприклад, у (1.4.40), в лівій частині невідоме - X, а в правій - невідомі Y та Z. Те саме у двох інших рівняннях. Але ці рівняння можна розв'язувати способом послідовних наближень, тобто способом ітерацій. Для цього спочатку знайдемо наближені значення невідомих висот вузлових точок, використовуючи відомі репери, що розташовані найближче до шуканих:

У рівняння (1.4.40) підставимо наближені значення Y та Z. Знайдемо Хх із першого наближення. Далі, під час розв'язування рівняння (1.4.41), підставляємо не X, а значення Хх - із першого наближення. Знайдемо Yx. Визначаючи Z з (1.4.42), будемо підставляти неХпр, Ynp, а Хх та Yx. Тоді знайдемо з першого наближення Zf.
Розділ І
Переходимо до другого наближення: визнаючи X, підставляємо у (1.4.40) значення lj, Z(і так далі.
Зазвичай достатньо 3-4 наближень. Ітерацію закінчують, якщо в останньому й передостанньому наближенні значення невідомих однакові. Зрозуміло, що такий метод придатний для мережі зі значною кількістю ходів та вузлових точок. Рівняння для визначення невідомих висот реперів складають безпосередньо зі схеми нівелірної мережі. Тому цей спосіб широко застосовується у виробництві. Обчислення виконують на персональних комп'ютерах.
1.4.6. Зрівноваження нівелірної мережі порівнянням нев'язок суміжних ходів
Цей простий, наближений метод розглянемо на мережі з восьми ходів, що створюють чотири полігони і п'ять вузлових точок (рис. 1.4.6).
В
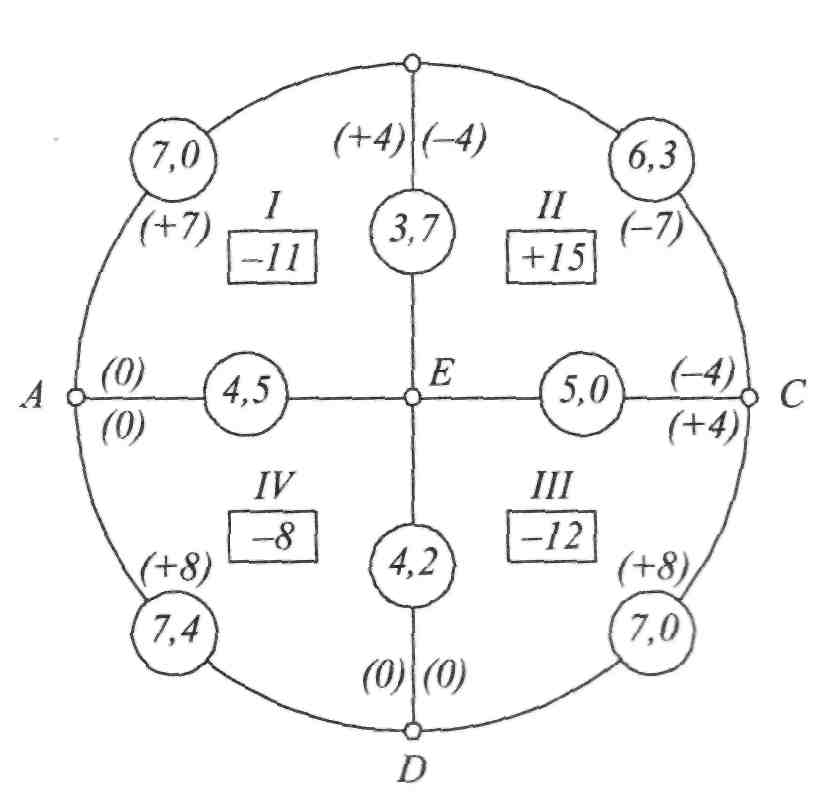
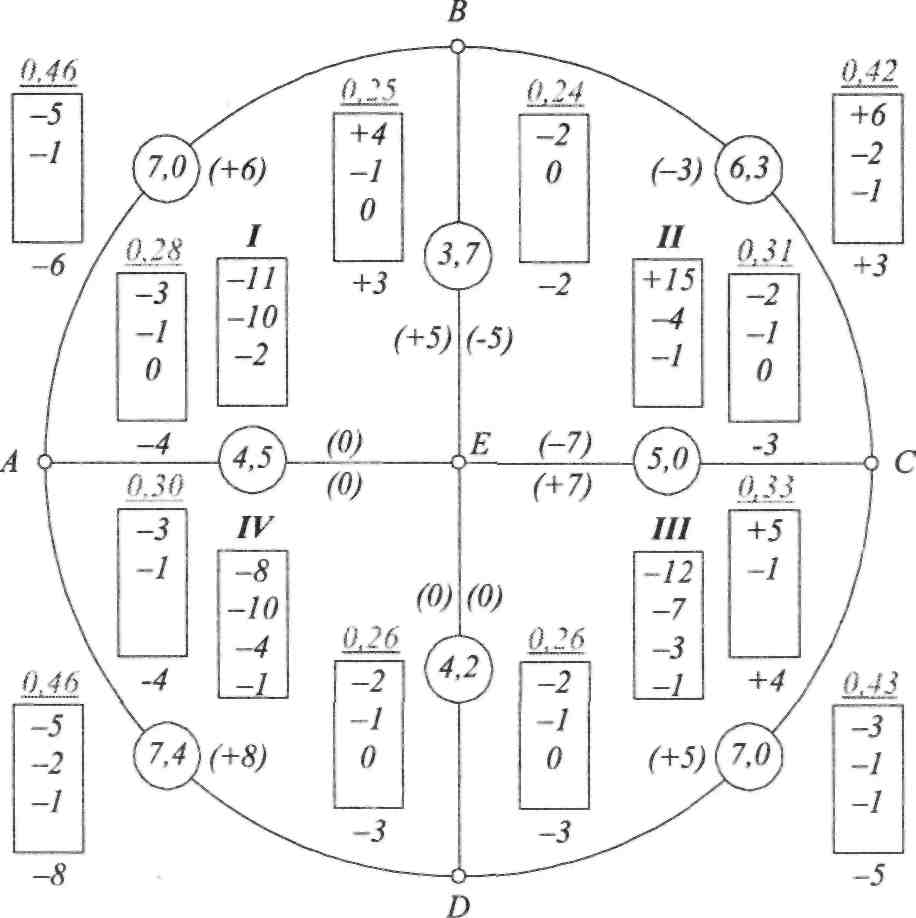
Рис. 1.4.6. Нівелірна мережа з чотирьох полігонів
У прямокутниках подані нев'язки полігонів у мм, у кружках - довжини ходів між вузловими точками у км.
Нехай у ході BE полігона І перевищення з плюсом, тоді в ході ЕВ II полігона перевищення з мінусом. Нев'язки в цих двох полігонах із протилежними знаками. У першому полігоні, щоб позбутися нев'язки, потрібно в окремі ходи, наприклад, на хід BE, вводити додатні поправки, оскільки перевищення між точками BE й ЕВ за абсолютною величиною повинні бути однакові, тоді поправки на хід ЕВ повинні бути такої самої величини, але від'ємні. Оскільки
Висотні геодезичні мережі
нев'язка у полігоні II - додатна, то від'ємна поправка на хід ЕВ зменшить нев'язку полігона II. Це означає, що похибка в суміжному ході цих полігонів є до певної міри причиною нев'язок.
Тому у цей хід доцільно вводити поправки.
Розглянемо два суміжні полігони, нев'язки яких мають однакові знаки. Візьмемо хід ЕА полігона І та хід АЕ полігона IV. У хід ЕА цього полігона треба вводити додатну поправку, щоб зменшити нев'язку полігона І. Тоді хід АЕ отримає від'ємну поправку такої самої величини. Оскільки нев'язка полігона IV - від'ємна, тоді ця нев'язка збільшиться.
Це означає, що у такому разі похибки вимірювання перевищень у цьому суміжному ході не є причиною нев'язок. Тому в цей хід вводити поправки не треба. Зі сказаного випливають такі правила розподілу нев'язок:
1. Якщо у двох суміжних полігонах нев'язки з протилежними знаками, то в суміжний хід необхідно вводити однакові поправки з протилежними знаками і зменшити нев'язки цих полігонів.
2. Якщо у двох суміжних полігонах нев'язки з однаковими знаками, то в суміжні ходи не можна вводити поправки.
3. Абсолютні значення поправок повинні бути прямо пропорційні до довжини ходів, що створюють полігон.
Користуючись цими правилами, зрівноважимо мережу, подану на рис. 1.4.6. Почнемо з полігона І. У хід ЕА вводити поправку не треба. Тому поправки в цей суміжний хід дорівнюють нулеві. Нев'язка (-11) мм припадає на два ходи. Хід АВ - довший порівняно з ходом BE. Тому розподілимо нев'язку так: на хід BE - (+4); на хід АВ - (+7). Поправки на рисунку взяті у круглі дужки. Перший полігон ув'язано.
Перейдемо до полігона П. Полігон отримав поправку (-4). Залишилась нев'язка (+11). Поправки на два інші ходи цього полігона будуть (-4) та (-7).
Перейдемо до полігона III. Тут залишилась нев'язка (-8). У хід DE вводити поправки не можна, залишок нев'язки необхідно ввести в зовнішній хід CD - (+8).
Нарешті, розглядаємо полігон IV. Два ходи цього полігона отримали нульові поправки. Це означає, що всю нев'язку треба ввести в зовнішній хід DA - (+8). Мережа ув'язана.
Спосіб простий, оскільки зрівноваження виконують безпосередньо на схемі мережі, практично без обчислень і, за певного досвіду, спосіб дає результати, що часто задовольняють інженерну практику.
Розділ І
1.4.7. Зрівноваження нівелірної мережі методом В.В. Попова
|
Рис. 1.4.7. Зрівноваження нівелірної мережі способом полігонів
Професор В.В. Попов удосконалив розглянутий нами спосіб порівняння нев'язок так вдало, що він став точним. Розглянемо суть цього способу на тій самій мережі, яка подана на рис. 1.4.6. Мережа зображена у збільшеному вигляді на рис. 1.4.7. Спосіб, названий автором способом полігонів, зводиться до послідовного розподілення нев'язок у кожному полігоні пропорційно до ваг окремих ходів, приведених до одиниці. Ці ваги називаються червоними числами, оскільки на схемах мереж їх виписують червоним кольором.
|
Розглянемо, як обчислюють червоні числа (приведені ваги) на прикладі полігона І. Периметр полігона 1-15,2 км, а хід АВ має довжину 7,0 км.
| , ХАВ= 0,46; 0,46 і є приведена вага |
|
| Для ходу BE відповідно знайдемо: |
Складемо пропорцію: ходу АВ.
Аналогічно знайдемо вагу ходу ЕА. Вона становить ХЕА = 0,30. Контроль: сума приведених ваг полігона повинна дорівнювати одиниці: 0,46 + 0,24 + 0,30=1,00.
Висотні геодезичні мережі
Обчислюють ваги всіх ходів і записують зовні полігона, біля відповідних ходів. Під кожним червоним числом заготовлена рамочка, у яку вписують поправки, що припадають на відповідний хід. Ці числа на рис. 1.4.7 наведено нахиленими, підкресленими цифрами.
Розпочати розподілення нев'язки можна з будь-якого полігона, але краще з полігона з найбільшою абсолютною нев'язкою. Помноживши +15 відповідно на червоні числа II полігона 0,42; 0,33; 0,25, записуємо результати, округлені до цілих міліметрів у відповідні рамки зовні полігона з тим самим знаком, що і нев'язка полігона. Це будуть поправки, які припадають на ті ходи в суміжних полігонах, біля яких ці червоні числа записані. Так: +4 (записані під 0,25); +5 (записані під 0,33); +6 (записані під 0,42) будуть стосуватися відповідно ходів BE (І полігон), EC (III полігон), ВС - зовнішній хід. Сума поправок повинна давати нев'язку: 4 + 5 + 6 = 15.
Потім переходимо до III полігона, тобто йдемо за годинниковою стрілкою. У ньому хід EC отримав поправку +5. Одержану залишкову нев'язку (-7) записують у рамку під числом (-12). Цю залишкову нев'язку множимо на червоні числа полігона III і результати (-2), (-2), (-3) записуємо у відповідні рамки полігона III, що розташовані зовні нього. Далі переходимо до четвертого полігона. У ньому була нев'язка (-8), але хід ED отримав поправку (-2). Тому сумарну нев'язку (-10) записують під початковою нев'язкою (-8). Нев'язку (-10) множать на червоні числа полігона IV і записують у рамки зовні цього полігона (-5), (-3), (-2).
Нарешті, переходимо до І полігона. У ньому поправки мають два ходи: хід BE (+4) та хід ЕА (-3). Тому нев'язку (-11) виправимо на суму цих поправок. Отримаємо (-10), які записуємо під (-11). Нев'язку (-10) множимо на червоні числа І полігона, записуючи відповідні поправки (-5), (-3), (-2) у відповідні рамки. На цьому закінчується перше коло розподілення нев'язок.
Переходимо до другого кола, все повторяючи у тій самій послідовності і починаючи з полігона II. У цьому полігоні нев'язку ми вже розподілили, але потім ходи СЕ й ЕВ отримали нові поправки (-2) і (-2). Додавши їх, одержимо нову нев'язку - (-4) цього полігона. Нову нев'язку розподіляємо так само, як описано вище, вписуючи вторинні поправки ходів у відповідні рамки. Аналогічно розподіляємо вторинні нев'язки в усіх полігонах і переходимо до наступного кола. У нашому випадку необхідно було зробити три кола. Тепер залишається в кожній рамці під червоними числами розрахувати алгебраїчну суму поправок. Для периферійних ходів потрібно в алгебраїчній сумі поміняти знаки на обернені й отримані у такий спосіб числа записати всередині відповідного полігона біля відповідного ходу. Наприклад, для ходу АВ маємо
Розділ І
зовні - 6, тоді ми повинні записати (+6). Для розпізнавання поправок у ходи записуємо їх у круглі дужки.
Для внутрішніх ходів кожної пари суміжних полігонів є по дві рамки, розміщені по різні сторони ходу. Так, для ходу СЕ рамка всередині II полігона дає поправку (-3), а для ходу EC - рамка всередині полігона III дає поправку (+4), що під час переводу на хід СЕ дає (-4). Додавши (-3) і (-4), знайдемо загальну поправку ходуС£\ яка дорівнює (-7). Для ходу EC поправка дорівнюватиме (+7). Ці дві величини ми і вписуємо біля цього ходу, кожну всередині відповідного полігона. Контролем знайдених поправок є те, що їхня сума має давати початкову нев'язку з оберненим знаком.
Зазначимо, що якщо розподіл нев'язок виконувався б із заокругленням до десятих часток мм, то поправки деяких ходів змінились би тільки на 1 мм, однак потрібно було б шість кіл, що не виправдовує витрат потрібного для цього майже вдвічі більшого часу.
Порівнюючи рис. 1.4.6 і рис. 1.4.7, бачимо, що в деяких ходах поправки, отримані двома способами, відрізняються. Спосіб порівняння нев'язок, як уже відзначалось, наближений і застосовували ми його спрощено, не дотримуючись точної пропорційності поправок і довжин ходів. Проте на цьому прикладі ми бачимо, що розподіл нев'язок наближеним способом виконується приблизно так, як і строгим способом. Нульові поправки одержали ті самі ходи під час зрівноваження обома способами. Зрівноважування закінчують складанням каталогу висот реперів та оцінкою точності отриманих результатів.
Розділ II. ПЛАНОВІ ГЕОДЕЗИЧНІ МЕРЕЖІ
11.1. Методи створення планових мереж. Основні вимоги. Формули
//. 1.1. Сучасні методи створення планових мереж
Планові опорні геодезичні мережі - це точки з відомими координатами (Xt, Yj), які фундаментально закріплені на земній поверхні або на спорудах і визначені на основі лінійних та кутових вимірювань.
Залежно від геометричної форми та безпосередньо виміряних елементів розрізняють чотири основні методи створення планових мереж:
1. Тріангуляція.
2. Полігонометрія.
3. Трилатерація.
4. Супутниковий метод.
5. Розглянемо суть кожного із цих методів.
Тріангуляція - це мережа трикутників, що межують один з одним, у яких вимірюють усі кути й хоча би одну сторону. На рис. II. 1.1 подано ланку тріангуляції, що складається із восьми трикутників. Довжини сторін трикутників у ланках тріангуляції можуть сягати 20-25 км.
Чотирикутник AMBN - базисна мережа. Базисні мережі будувались для визначення довжини сторони трикутника. Сторона АВ безпосередньо не вимірювалась. Вимірювався базис - лінія MN та вісім кутів чотирикутника -ромба, що отримав назву геодезичного чотирикутника. У цьому чотирикутнику більша діагональ АВ, що визначалась, одночасно є стороною першого трикутника ланки. Базис вимірювався підвісними мірними приладами. Такі сторони, як АВ, називають вихідними. Базисні мережі будувалися до появи світловіддалемірів. Світловіддалемірами можна вимірювати довжини сторін трикутників, не будуючи базисних мереж. Сторони, безпосередньо виміряні світловіддалемірами, називають базисними. Ланки тріангуляції зазвичай складаються з 10-12 трикутників. Віддалі між кінцевими пунктами ланки можуть сягати 200-250 км. Ланки, як правило, прокладають уздовж меридіанів та паралелей. Чотири такі ланки (дві - уздовж паралелей, дві - уздовж меридіанів) створюють полігон периметром 800-1000 км. Усередині полігон заповнюють суцільною мережею трикутників тріангуляції такого самого класу або нижчого за точністю. Вершини трикутників, закріплені на місцевості, називають пунктами тріангуляції. Координати початкових (вихідних) пунктів
Розділ II
на кінцях ланки та азимути вихідних сторін визначають з астрономічних спостережень. На таких пунктах, показаних на рисунку п'ятикутними зірками, виконують астрономічні визначення широт ф та довгот X, а також визначення
прямих та зворотних азимутів сторін АВ та CD. Такі пункти називають пунктами Лапласа. Горизонтальні кути та довжини сторін визначають із геодезичних вимірювань. Мережі, де поєднують астрономічні й геодезичні вимірювання, називають астрономо-геодезичними.
В с
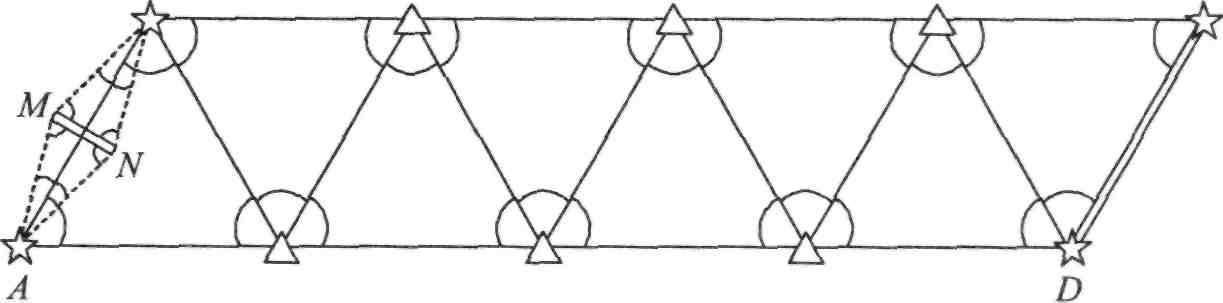
Рис. II. 1.1. Астрономо-геодезична тріангуляційна ланка
У Радянському Союзі, у який входила Україна, була створена державна тріангуляційна мережа, що складалася із чотирьох класів: найточніший - 1-й клас, точність мереж поступово знижувалась з переходом до 2-го, 3-го та 4-го класів. Основні вимоги до державних тріангуляційних мереж СРСР подано в табл. II. 1.1.
Таблиця II. 1.1 Головні вимоги до мереж тріангуляції у СРСР
| ~~~------------ ____ Класи Характеристики - | ||||
| Довжини сторін трикутників, км | 20-25 | 7-20 | 5-8 | 2-5 |
| Відносні похибки визначення базисних сторін | 1:400000 | 1:300000 | 1:200000 | 1:100000 |
| Середня квадратична похибка вимірювання кутів," | ±0,7 | ±1,0 | ±1,5 | ±2,0 |
Трилатерація - це також ланки трикутників, як і в тріангуляції, що межують один з одним, але з виміряними сторонами, а не кутами. Вершини трикутників мережі трилатерації називають пунктами трилатерації. Кінцева мета створення трилатерації, як і створення тріангуляції - визначення планових координат пунктів.
Планові геодезичні мережі
Полігонометрія - побудована на місцевості система ламаних ліній (рис. II. 1.2) з виміряними відрізками St та горизонтальними кутами р\. Ламана лінія - це полігонометричний хід. Відрізки Sj - сторони полігонометричного ходу. Горизонтальні кути (З,- між відрізками - кути повороту ходу; вершини полігонометричного ходу, позначені на рисунку кружками, пронумеровані 1, 2,..., і,..., п+1 є пунктами полігонометричного ходу. Пункти полігонометрії фундаментально закріплені на місцевості, як і пункти тріангуляції чи трилатерації.
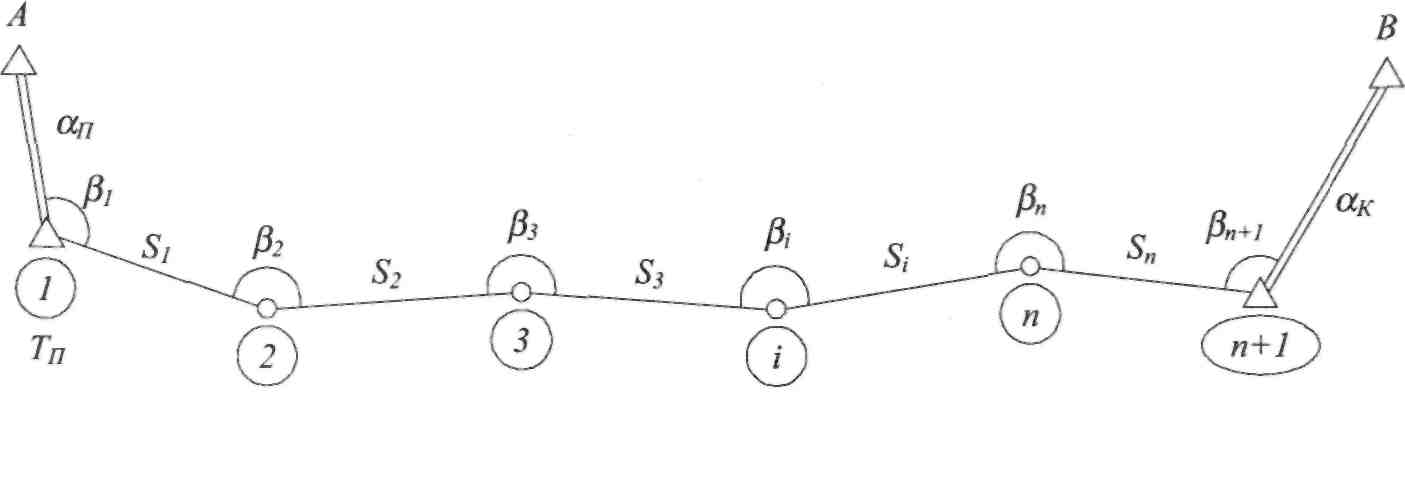
|
хп Т«
Yn XK
YK
Рис. 11.1.2. Полігонометричний хід, прокладений між пунктами тріангуляції (Tjj- початковий, Тк - кінцевий) з відомими координатами і дирекційними кутами
Метод полігонометрії вважають рівноцінним із методом тріангуляції. Тому і вимоги до мереж полігонометрії майже такі самі, як до мереж тріангуляції. Ці вимоги подані в табл. II. 1.2. Як бачимо з таблиці, державна полігонометрія у Радянському Союзі також мала чотири класи.
Таблиця II. 1.2 Основні вимоги до державної полігонометрії у СРСР
| """"""""^-^^^ Класи ХарактеристикТг------.^^^ | ||||
| Довжина сторін, км | 20-25 | 7-20 | 5-8 | 2-5 |
| Відносна похибка вимірювання сторін | 1:300000 | 1:250000 | 1:200000* (1:150000) | 1:150000* (1:100000) |
| Середня квадратична похибка вимірювання кутів, " | 0,4 | 1,0 | 1,5 | 2,0 |
* Для сторін полігонометрії 3 та 4 класів, близьких до мінімальних, допускають відносні похибки 1:150000 та 1:100000 відповідно.

|
Розділ II
Планові геодезичні мережі
Проте до появи світловіддалемірів (світловіддалеміри у геодезичному виробництві з'явились тільки після Другої світової війни) тріангуляція займала провідне місце як метод створення державних геодезичних мереж. Метод полігонометрії застосовувався значно менше, переважно через складність вимірювання ліній.
Супутниковий метод створення мереж. У наш час поширена система GPS - Global Positioning System (глобальна пошукова система). Розглянемо принцип визначення розміщення наземних пунктів системою GPS. GPS-приймач, що встановлюють на пункті, координати якого визначають (пункт Р на рис. II. 1.3), приймає радіосигнали від штучних супутників Землі, що мають відомі миттєві координати; приймач вимірює віддалі R:, R2, i?3,..., Rt до
супутників (не менше від чотирьох). Координати супутників передаються на GPS-приймач. Відповідно до рис. II. 1.4 можна записати чотири такі рівняння:
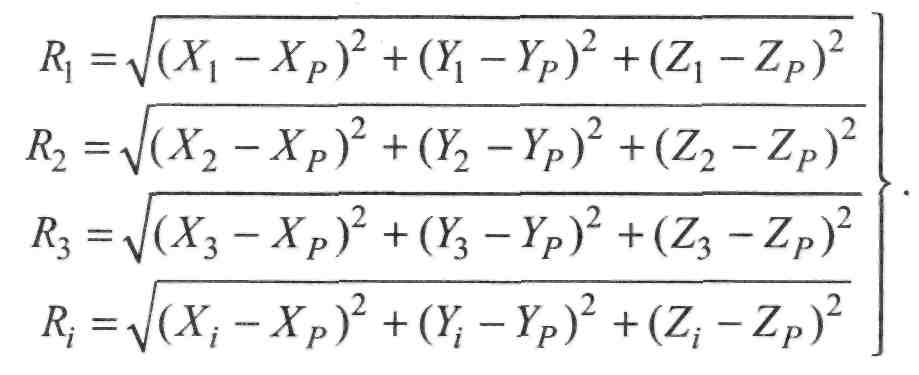
|
(П.1.1)
У системі (II. 1.1) три невідомі Хр, YP, ZP. Насправді є чотири невідомі: крім Хр, YP, ZP, ще невідома асинхронність 8г (різниця похибок показів хронометрів супутника та приймача). Саме тому потрібно спостерігати мінімум чотири супутники. Розв'язавши ці рівняння, знайдемо шукані координати точки Р. Електронно-обчислювальна система GPS-приймача розв'язує ці рівняння і відображає на дисплеї координати ХР,YP,ZP.
GPS-приймачі пристосовані до визначення прямокутних геодезичних координат X, Y, Z (з початком у центрі мас Землі), топоцентричних прямокутних координат X, Y, Н (із початком координат на топографічній поверхні Землі) та геодезичних координат В, L, Н (широт, довгот та висот). Визначають геоцентричні координати з точністю до 5 м. Така точність не задовольняє вимог геодезії.
Якщо один GPS-приймач розміщений на пункті з відомими координатами, а другий - на невідомому (рис. II. 1.4), тоді можна отримати прирости координат АХ, АГ, AZ. Такі відносні, а не абсолютні визначення координат значно (приблизно в 100 разів) точніші. Похибка визначення координат близько 5 см може бути зменшена збільшенням часу спостереження.
Розділ II
Як це зрозуміло з рисунка, GPS-технології дають змогу одночасно визначати як планове, так і висотне положення наземних пунктів. У геодезії широко застосовується відносний метод визначення координат.
11.1.2. Основні положення створення планових державних геодезичних мереж (ДГМ)
Основні положення затверджені Постановою Кабінету Міністрів України від 8 червня 1998 р. № 844.
Планова геодезична мережа складається з:
• астрономо-геодезичної мережі 1 класу;
• геодезичної мережі 2 класу;
• геодезичної мережі згущення 3 класу.
Для знімання масштабів 1:5000, 1:2000, 1:1000, 1:500 створюють розрядні мережі згущення, які поділяють на:
• мережі полігонометрії, трилатерації і тріангуляції 4 класу;
• мережі полігонометрії, трилатерації і тріангуляції І і II розрядів.
• ДГМ створюють для вирішення таких основних завдань в інтересах господарської діяльності, науки та оборони країни:
• встановлення єдиної геодезичної системи координат країни;
• забезпечення вихідними геодезичними даними засобів наземної, морської й аерокосмічної навігації;
• вивчення фігури і гравітаційного поля Землі та їхніх змін у часі;
• дослідження геодинамічних явищ та рухів земної поверхні;
• обґрунтування регіонів пошуку корисних копалин;
• вивчення руху полюсів та нерівномірності обертання Землі;
• інші задачі.
Положення пунктів ДГМ визначають у двох системах координат -загальноземній та референцній; між ними встановлюється однозначний зв'язок, який визначають параметрами взаємного переходу. За загальноземну систему приймають геодезичну референцну систему 1980 року (GRS 1980) з такими параметрами еліпсоїда:
велика піввісь a = 6378137 м, стиснення  (Ь- мала
(Ь- мала
піввісь).
На перехідний період (до введення системи GRS) залишається система координат 1942 року (СК-42) з вихідними даними:
Планові геодезичні мережі
• референц-еліпсоїд Красовського (велика піввісь a = 6378245 м);
• стиснення 1:298,3;
• висота геоїда в Пулково над референц-еліпсоїдом дорівнює нулю.
//. 1.3. Астрономо-геодезична мережа 1 класу (АГМ-1)
Астрономо-геодезичну мережу будують у вигляді однорідної за точністю просторової геодезичної мережі, яка складається із системи рівномірно розташованих геодезичних пунктів, віддалених один від одного на 50-150 км. АГМ-1 є геодезичною основою для побудови нових мереж і забезпечення подальшого підвищення точності наявної мережі.
Частина пунктів АГМ-1 являє собою постійно діючі станції GPS-спосте-режень та астрономо-геодезичні обсерваторії, на яких виконують комплекс безперервних супутникових астрономо-геодезичних, гравіметричних та геофізичних спостережень за змінами форми і розмірів Землі, її гравітаційного поля, викликаними геодинамічними процесами.
Решта пунктів АГМ-1 - це фундаментально закріплені на місцевості пункти, положення яких періодично визначають за довгостроковою програмою їхнього функціонування.
Систему координат ATM-1 узгоджують з науковими проектами міжнародної співпраці. Просторове положення пунктів АГМ-1 визначають методами супутникової геодезії у загальноземній системі з відносною похибкою Ар/р = = 1 • 10~8 (Ар- середня квадратична похибка визначення геоцентричного радіуса р пункту). Кожен пункт АГМ-1 повинен бути зв'язаний GPS вимірюваннями не менш як з трьома пунктами мережі, що межують з ним.
Пункти АГМ-1 повинні бути зв'язані з мережами високоточного нівелювання, що дає змогу визначити перевищення нормальних висот між сусідніми пунктами АГМ-1 з середньоквадратичними похибками, не більшими за 0,05 метра. На кожному пункті АГМ-1 періодично повторяють визначення відхилення прямовисних ліній із середньоквадратичною похибкою - 0,5".
//. 1.4. Основні вимоги до державної мережі 2 класу
Геодезичну мережу 2 класу будують у вигляді однорідної за точністю просторової мережі, яка складається з рівномірно розташованих пунктів мережі 1 та 2 класів, побудованих згідно з вимогами до такої мережі у СРСР та нових пунктів, що визначаються відповідно до вимог сучасних основних положень. Нові пункти геодезичної мережі 2 класу розташовуються на відстані 8-12 км, і
Розділ II
їхнє розміщення визначають, як правило, відповідними методами супутникової геодезії, а також наземними методами (тріангуляції, трилатерації, полігонометрії), які забезпечують точність визначення взаємного положення пунктів з середньоквадратичними похибками 0,03-0,05 метрів для середньої довжини сторін 10 км. За вихідні пункти приймають пункти АГМ-1. Група нових пунктів мережі 2 класу повинна мати зв'язок не менш ніж із трьома пунктами АГМ-1. Периметр полігонів полігонометрії 150-180 км, найбільша довжина полігонометричного ходу 60 км. Основні вимоги до побудови мережі 2 класу подано в табл. П.1.3.
Таблиця II. 1.3

