




Электрооборудование современного самолета представляет собой сложную энергосистему, снабженную большим количеством автоматических систем и дистанционных передач. Современный летательный аппарат представляет собой сложное техническое устройство, выполняющее определенные технологические операции при полете в атмосфере и (или) космическом пространстве.
В зависимости от назначения ЛА в качестве таких операций могут рассматриваться транспортировка пассажиров или грузов, вывод многоцелевой нагрузки на околоземную орбиту, перехват воздушной цели, мониторинг земной поверхности:воздуха (из космоса), доставка боевого заряда к цели и т.п.
При классификации ЛА учитываются [1]:
• принцип создания подъемной силы (аэростатические, аэродинамические, газодинамические ЛА);
• степень повторности использования (одно и многоразовое);
• назначение (научно-исследовательское, сельскохозяйственное, спортивное и т.п.);
• конструктивные признаки (количество и расположение крыльев, тип фюзеляжа, оперения, шасси, двигательной установки и т.п.);
• область применения (военная, гражданская или смешанная);
• количество ступеней (одно- и многоступенчатое, составное);
• класс в зависимости от взлетной массы;
• присутствие человека на борту (пилотируемые и беспилотные).
Для спортивных соревнований и регистрации рекордов используется классификация, установленнаяМеждународной авиационной федерацией [1].
В соответствии со спортивным кодексом этой организации все ЛА делятся на следующие классы: класс А – свободныеаэростаты, В – дирижабли, С – самолеты, гидросамолетыи самолеты-амфибии, Е – винтокрылые аппараты, f – модели ЛА (свободнолетающие, кордовые, радиоуправляемые и точные копии-модели), G – парашюты, Н – ЛА с реактивной подъемной силой, I – ЛА с мускульным движителем, К – космические аппараты, L – ЛА с предельной высотой полета (на воздушной или магнитной подушке), М – аппараты с поворотом крыла или двигательной установки, N – ЛА короткого взлета и посадки, О – безмоторные аппараты, Р – воздушно-космические аппараты, R – сверхлегкие самолеты, S –космические модели.
Среди пилотируемых ЛА наибольшее распространение получили авиационные летательные аппараты – самолеты и вертолеты – аппараты тяжелее воздуха, предназначенные для полетов в атмосфере. Самолет совершает полет благодаря создающему тягу двигателю и неподвижному крылу, которое при движении в воздушной среде создает аэродинамическую подъемную силу. У вертолета подъемная и пропульсивная (толкающая вперед) силы создаются одним или несколькими приводимыми во вращение двигателем несущими винтами.
В качестве двигательной установки на таких ЛА преимущественно применяются газотурбинные воздушно-реактивные двигатели (ВРД), в то время как на некоторых ЛА, например легкомоторных спортивных, почтовых и учебных самолетах, легких вертолетах, используются поршневые двигатели.
Область применения пилотируемых ЛА обширна и достаточно полно отражена в отечественной и зарубежной литературе [1].
В настоящее время значительно возросла роль управляемых и неуправляемых беспилотных летательных аппаратов (БЛА). Управляемый полет беспилотного летательного аппарата может происходить в автономном режиме по заранее заданной перед стартом программе или при дистанционном управлении оператором, находящимся вне ЛА на наземном, воздушном, морском или космическом командном пункте. В зависимости от формы управления БЛА – непрерывная (дистанционная) или дискретная (командная) – различают дистанционно-пилотируемые ЛA (ДПЛА) и телеуправляемые ЛА.
Как правило, ДПЛА представляют собой аппараты многоразового использования, которые выполняются по самолетной (реже по вертолетной) аэродинамической схеме, запускаются с использованием специальных пусковых устройств, а приземляются с помощью парашюта или по-самолетному, с пробегом. В качестве двигательных установок в зависимости от размерности и назначения ДПЛА могут применяться поршневые, турбо- и прямоточные реактивные двигатели, а также электродвигатели.
Особое место среди БЛА занимают ракеты – летательные аппараты одноразового использования с реактивной двигательной установкой. Полет таких аппаратов обеспечивается благодаря прямой реакции струи газов, образующейся при сжигании топлива.
В 1957 г. ЛА достигли космоса. Отсутствие атмосферы и силы тяжести предопределило специфические особенности формы, конструкции и способа перемещения таких аппаратов в пространстве. В отличие от рассмотренных выше ЛА космические аппараты (КА) могут иметь любую форму с ограничениями по массе и габаритным размерам, накладываемыми грузоподъемностью носителей, размерами головных частей ракет-носителей или грузовых отсеков транспортных кораблей многоразового использования. В зависимости от назначения КА на участке выведения ему сообщается определенная скорость, после чего он продолжает полет по инерции в поле сил тяготения.
Разновидностью ЛА, сочетающих свойства ракет, космических и аэродинамических аппаратов, является воздушно-космический самолет (ВКС). Такой аппарат входит в состав транспортной системы многоразового использования и объединяет ряд признаков самолета, ракеты-носителя и космического аппарата. Воздушно-космический самолет рассчитан на достижение орбитальных высот и скоростей, полет в космическом пространстве, маневрирование на орбите или с погружением в атмосферу, спуск в атмосфере с маневрированием для горизонтальной посадки в заданном районе. Подобные ЛА выполняются в пилотируемом и беспилотном вариантах.
Важную роль в решении целевых задач в соответствии с назначением ЛА играет его оборудование – совокупность агрегатов, приборов, электронных устройств, механизмов и других технических средств, размещаемых на борту. В зависимости от типа ЛА и выполняемых им задач, объем такого оборудования может быть различным, но основные виды его сохраняются.
Применительно к самолету бортовое оборудование можно разделить на группы, обеспечивающие:
• взлет, управляемый полет и посадку;
• жизнедеятельность экипажа и пассажиров;
• безопасность полета;
• энергетические потребности бортовой аппаратуры;
• выполнение задач, связанных с назначением ЛА.
Взлет, управляемый полет и посадка составляют основные этапы выполнения полетного задания летательного аппарата. На взлетно-посадочных этапах полета происходит изменение конфигурации самолета, при этом с помощью соответствующих систем обеспечиваются уборка (выпуск) шасси, тормозных щитков, работа механизации крыла. Последняя представляет собой совокупность устройств в передней (поворотные носки, предкрылки, носовые щитки и др.) и задней (поворотные и скользящие щитки, поворотные и щелевые закрылки) частях крыла, используемых для изменения его аэродинамических параметров.
При полете управление положением самолета в пространстве может выполняться в ручном или автоматическом режиме воздействием на органы – специальные аэродинамические поверхности, которые располагаются на крыле, а также (при нормальной аэродинамической схеме) в горизонтальном и вертикальном оперении. Продольное управление осуществляется рулем высоты, или стабилизатором, поворотными рулями, элеронами и др. К органам поперечного управленияотносятся элероны, интерцепторы, а путевого – руль направления или целиком поворотный киль.
Органы управления выбираются в зависимости от аэродинамической схемы ЛА, его назначения, диапазона скоростей полета и т.п. При ручном управлении для отклонения рулей управления летчик перемещает установленные в кабине рычаги управления – ручку (или штурвал) управления и педали. На небольших самолетах передача усилийиперемещений выполняется проводкой управления – жесткой, в виде шарнирно подвешенных на рычагах-качалках тонкостенных труб, или гибкой,состоящей из тросов и роликов. На больших и скоростных самолетах с мощной взлетно-посадочной механизацией мускульной силы летчика недостаточно для преодоления шарнирных моментов, поэтому в контур управления включают гидроусилители (рис. 3.1).
На ряде самолетов вместо механической проводки управления применяется электродистанционная, в которой передача управляющихкоманд осуществляется по электрическим линиям связи [24, 25]. Полет самолета невозможен без надежной работы силовой установки – совокупности двигателя (двигателей), систем и устройств ЛА, создающих необходимую тягу. Работа силовой установки начинается с запуска двигателя, который обеспечивается системой запуска.

Рис. 3.1. Управление элеронами самолета Ил-76Т:
1 – штурвал; 2 – загрузочное устройство; 3 – проводка управления интерцепторами в элеронном режиме; 4 – пружинный цилиндр сервокомпенсатора; 5 – электропривод триммера; 6 – триммер;
7 – сервокомпенсатор; 8 – гидроусилитель; 9 – рулевые машины автопилота;
10 – механизм разъединения проводок; 11 – проводка управления;
НП – направление полета
Последняя включает в свой состав: устройства, осуществляющие предварительную раскрутку ротора двигателя; агрегаты для дозированной подачи топлива и воспламенения горючей смеси в камере сгорания; устройства, вырабатывающие запрограммированную последовательность команд управления и автоматизирующие процесс запуска, а также обеспечивающие устойчивую работу двигателя при запуске. Помимо запуска на земле система выполняет холодную прокрутку, запуск в воздухе, управление реверсированием двигателя при пробеге и т.п.
Бесперебойная подача топлива двигателям во всех режимах их работы в воздухе и на земле, а такжеприем топлива с последующим размещением его на борту и поддержание заданной центровки ЛА по мере выработки топлива осуществляются топливной системой. Кроме перечисленных функций эта система выполняет прокачку топлива через топливомасляные теплообменники (этим обеспечивается охлаждение масла системы смазки двигателей), а в сверхзвуковых ЛА – его подачу для использования в качестве хладагента для охлаждения воздуха в системе кондиционирования, специальных жидкостей, генераторов и приборных отсеков.
В состав топливной системы входят баки, магистрали подачи топлива, подкачивающие и перекачивающие насосы, датчики расходов топлива, анализаторы давления, устройства аварийного слива топлива в атмосферу и т.п.
Требуемые для полета ЛА мощность двигательной установки (ДУ), а также надежная, экономичная и устойчивая работа силовой установки во всем диапазоне изменения условий эксплуатации обеспечивается регулированием двигателя. Эта операция осуществляется системой автоматического управления силовой установкой. Соответствующие законы регулирования формируются с учетом требований к тяге и удельному расходу топлива, экономии ресурса двигателя, ограничению его мощности, необходимой точности поддержания других параметров.
Управляемый полет (самолетовождение) обеспечивает пилотажно-навигационное и радиотехническое оборудование. Объем задач, решаемых пилотажно-навигационным оборудованием,зависит от типа ЛА, его назначения и условий применения. Основные задачи этого оборудования связаны с определением текущего местоположения ЛА и его отклонения от заданной траектории полета, формированием команд управления движением центра масс ЛА на заданной траектории, индикацией пилотажно-навигационных параметров и т.п. Пилотажно-навигационные параметры (высота, скорость полета, курс, крен, тангаж и т.п.) определяются с помощью мембранно-анероидных (высотомер, вариометр, указатель скорости) и гироскопических (авиагоризонт, гирокомпас, указатель поворота и др.) приборов, а также с использованием радиотехнических средств. Последние могут быть автономными, работающими по радиолокационному принципу (радиовысотомер, измеритель скорости и угла сноса на основе эффекта Допплера, бортовая радиолокационная станция и т. п.), и неавтономными, представляющими собой совокупность радиомаяков и бортовых радиотехнических систем (радиотехнические системы дальней и ближней навигации, спутниковая навигационная система, радиокомпас, система предупреждения столкновений и др.). Помимо задач радионавигации радиотехническое оборудование используется для ведения двусторонней связи с наземными пунктами наведения и управления, межсамолетной и внутрисамолетной связи, а также обеспечения посадки в сложных метеорологических условиях.
Крейсерский полет часто выполняется в режиме автоматического управления ЛА. Последний представляет собой процесс программного изменения и стабилизации отдельных параметров движения ЛА с помощью средств автоматики без воздействия экипажа на органы управления. Такая система управления (автопилот) состоит из близких по принципу действия автоматов, каждый из которых обеспечивает сохранение определенного параметра режима полета.
Hа военных самолетах широко применяются прицельно-навигационные системы, комплексно решающие задачи навигации и применения оружия. Решение двух задач в одной системе оказалось возможным благодаря общности математического аппарата и использованию одних и тех же датчиков информации.
В процессе полета вся информация, необходимая для выполнения полетного задания, контроля работы силовой установки и бортового оборудования, поступает экипажу с помощью системы отображения информации, представляющей собой совокупность приборов, индикаторов и сигнализаторов, устанавливаемых на рабочих местах членов экипажа. Кроме отображения информации при полете производится регистрация переговоров экипажа, а также параметров полета и работы тех бортовых систем, работоспособность которых влияет на успешное выполнение полетного задания. Подобные функции выполняются системой сбора полетной информации. Все данные, зарегистрированные этой системой, обрабатываются непосредственно на борту ЛА или на земле после завершения полета. Полученная информация используется для контроля технического состояния систем, оценки правильности и полноты выполнения экипажем наставлений и руководств по летной эксплуатации, определения причин летных происшествий при их расследовании и т.п.
С помощью системы обеспечения жизнедеятельности для экипажа и пассажиров на любой высоте полета ЛА создаются условия жизнедеятельности и функционирования, близкие к имеющимся на земле. Система выполняет следующие функции:
• поддерживает в кабине и салоне требуемые значения давления, скорости изменения давления, температуры, влажности, скорости движения и расхода воздуха, парциального давления кислорода, углекислого и других газов;
• очищает воздух от вредных примесей;
• защищает экипаж и пассажиров от воздействия шума, солнечной радиации и т.п.
Комфортабельный полет невозможен без соответствующего освещения. Необходимый уровень освещенности обеспечивается внутренним светотехническим оборудованием, которое в виде ламп, плафонов и светильников размещается в кабине пилотов, пассажирском салоне, а также в багажном и технических отсеках самолета. При полете самолета могут возникать аварийные ситуации, приводящие к необходимости совершения вынужденной посадки на сушу или воду. В этом случае безопасность жизнедеятельности обеспечивается аварийно-спасательным оборудованием, с помощью которого производятся эвакуация и спасение терпящих бедствие людей. На боевых самолетах к этому оборудованию добавляется система катапультирования.
Безопасность полета обеспечивают системы, к которым относятся противообледенительное, противопожарное и внешнее светотехническое оборудование, технические средства предупреждения о возможном столкновении в воздухе и выходе ЛА на критические режимы полета, средства защиты ЛА от неблагоприятных воздействий окружающей среды.
Бортовое радиоэлектронное оборудование некоторых современных самолетов включает системы, использующие элементы искусственного интеллекта.
Так, многофункциональный истребитель Су-35 оснащен системой активной безопасности, не позволяющей самолету сваливаться в штопор даже в случае повреждения его ракетой противника. В память этой системы введена информация об авариях и катастрофах, а также оптимальных решениях по выходу из сложных полетных ситуаций. При этом учитываются реальные на данный момент времениусловия полета: скорость и направление воздушных потоков, координаты самолета, остаток топлива и т.п. При возникновении нештатной ситуации и опасных режимов полета, система способнапринять мгновенное решение, сообщить об этом пилоту и, в случае необходимости, на наземный командный пункт.
В особо опасных ситуациях она сама приведет в действие исполнительные механизмы, а при тяжелом ранении или потере сознания пилота примет решение о его катапультировании.
Работа всего бортового оборудования связана с потреблением энергии. Энергообеспечение различных систем и агрегатов ЛА выполняют система электроснабжения, гидравлическая и пневматическая системы.
По сравнению с пилотируемыми ЛА типовой состав бортового оборудования беспилотных аппаратов не столь обширен из-за отсутствия систем обеспечения жизнедеятельности и безопасности полета, аварийно-спасательного, светотехнического и бытового оборудования. Так, на большинстве ракет в состав служебного оборудования входят:
- система управления;
- исполнительные элементы системы управления;
- топливная система;
- источники и преобразователи энергии.
В беспилотном ЛА система управления (СУ) представляет собой совокупность устройств, обеспечивающих полет БЛА по заданному закону путем соответствующего регулирования управляющих сил и моментов. Для решения этой задачи аппаратура СУ должна:
· непрерывно измерять отклонение фактического движения центра масс ЛА от требуемого закона;
· в соответствии с величиной и направлением этого отклонения вырабатывать управляющие сигналы и подавать их на органы управления;
· поддерживать требуемое угловое положение корпуса ЛА, т.е. обеспечивать угловую стабилизацию.
Система управления состоит из нескольких каналов управления, например каналов тангажа, рыскания и крена. Внутри каждого из них во многих случаях можно выделить самостоятельный канал угловой стабилизации.
На рис. 3.2 показана упрощенная типовая схема одного из каналов системы управления [1].
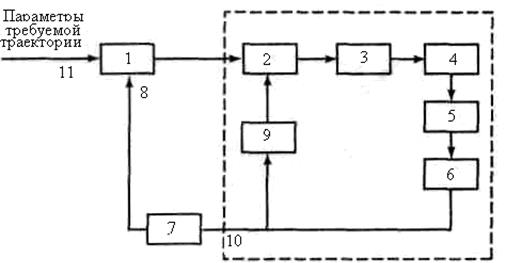
Рис. 3.2. Структурная схема типового канала системы
управления БЛА
В этой схеме измеритель 1 сравнивает фактическую траекторию 8 БЛА с требуемой 11, определяет величину рассогласования (ошибки) и вырабатывает сигнал наведения, поступающий на исполнительные элементы системы управления, где усиливается в усилителе-преобразователе 3 и подается на рулевую машинку 4, которая через механизм управления 5 передает перемещение к органам управления (рулям) 6. В результате отклонения рулей возникает управляющий момент, корпус аппарата поворачивается на некоторый угол, что в свою очередь приводит к изменению управляющей силы 7. Под действием этой силы изменяется траектория движения центра масс аппарата. Параметры траектории вновь измеряются и сравниваются с требуемыми, после чего процесс повторяется. Таким образом, рассмотренный канал управления представляет собой замкнутый контур. Внутри описанного контура можно выделить контур стабилизации 10, необходимым элементом которого является измеритель углового положения корпуса 9. Сигнал стабилизации, вырабатываемый этим измерителем, складывается с сигналом наведения в специальном блоке суммирования 2 и подается на те же рули.
Таблица 3.1
Типовой состав потребителей электроэнергии на космическом аппарате
| Потребитель | Ток | Напряжение, В | Наличие вторичн. источника | Потребляемая мощность, Вт | Доля мощности в системе, % |
| Система жизнеобеспечения: электродвигатели нагреватели | Постоянный и переменный Постоянный | 28; 115 | Да Нет | 80–100 30–45 | 64–76 24–36 |
| Сист. упр. двигат. ориентации: гиродвигатели радиолокацион. оборудование оптические датчики запоминающие устройства вспомогательные устройства бортового вычисл. комплекса | Переменный >> Постоянный >> >> | 12–50 10; 10 000 27–28 | Да >> Нет Да Нет | 50–70 100–300 5–10 30–45 60–75 | 10–15 20–38 1–2 5–6 9–12 |
| Радиосистема: приемники и передатчики аппаратура связи | Постоянный >> | 5; 300; 1000; 2000 28; 12 000 | Да >> | 10–100 130–150 | 3,5–4 52–54 |
| Телеметрическая аппаратура | Постоянный и переменный | 9–12; 24–36; 100 | >> | 100–1300 | 42–45 |
| Система двигательных установок: электрореактивные двигатели | Постоянный и переменный | 5; 30–60; 300; 1000; 2000 | >> | 300–500 | 10–14; 1–18; 70–84 |
| Система приборного оборудования: аппаратура отображения информации коммутационная аппаратура управляющая электроника | Постоянный и переменный Постоянный >> | 5–10 120–200; 27–28 5; 27 | >> Нет Да | 210 – 470 45 – 100 45 – 100 |


 Благодаря этому быстро гасятся колебания БЛА относительно центра масс, вызванные случайными причинами, и устойчиво поддерживается угловое положение корпуса, необходимое для полета по заданному. Как и на пилотируемых ЛА, важное место в БЛА занимают энергетическая и топливная системы.
Благодаря этому быстро гасятся колебания БЛА относительно центра масс, вызванные случайными причинами, и устойчиво поддерживается угловое положение корпуса, необходимое для полета по заданному. Как и на пилотируемых ЛА, важное место в БЛА занимают энергетическая и топливная системы.
Эксплуатация самолетов в условиях боевого применения показала, что электооборудование, занимая меньший объем, оказалось менее уязвимым для огня противника, чем другое аналогичное гидравлическое или пневматическое оборудование. При этом полевой ремонт электрооборудования был значительно проще, поскольку замена поврежденного участка электросети требовала гораздо меньшего времени, чем замена гидравлических или пневматических трубопроводов.
Типовой состав потребителей электроэнергии на космическом аппарате показан в табл. 3.1.

