




График выполняется карандашом на листе формата А3 и включает два проекционно-связанных квадранта (два «поля») (рис. 4.1) Общей для этих квадрантов является шкала скорости хода судна (v). Кривые на верхнем поле представляют собой изменение силы, а кривые нижнего поля – изменение мощности.
|
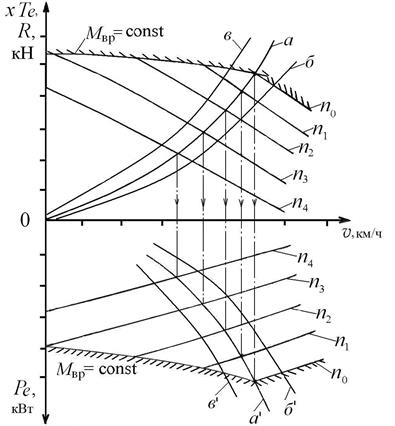
Рис. 4.1. Паспортная диаграмма судна
На «поле сил» показываются кривые изменения суммарного эффективного упора движителей (х×Те) при постоянных значениях частоты вращения гребного вала (ni = const, см табл. 4.2) и, кроме того, показывается изменение (х · Те) при режимах, когда значения потребляемой движителем мощности располагаются на ограничительной характеристике двигателя (см. табл. 4.1). У двигателя при этом остается постоянным значение вращающего момента (М вр = const) на выходном фланце двигателя.
На «поле мощностей» наносятся кривые изменения отбираемой от каждого двигателя мощности (Ре) при принятых частотах вращения винта (табл. 4.2) и, кроме того, показывается ограничительная характеристика двигателя (табл. 4.1).
Представление (изображение) кривых действия движителей на графике (рис. 4.1) завершается нанесением границ рабочей зоны «поля сил» и «поля мощностей». Выше кривой при М вр = const и выше кривой при no = const на «поле сил» располагаются значения (х · Те), которые движителями не могут быть созданы в силу того, что необходимые для этого мощности двигателем не обеспечиваются, т.е. эти мощности лежат за пределами области допустимых режимов его работы (см. рис. 1.1).
В связи с отмеченным «поле сил» и «поле мощностей» ограничиваются по максимальным значениям (см. рис. 4.1) и на графике удаляются участки кривых (х·Те) и Ре выходящие за эти границы.
ПРИМЕНЕНИЕ ГРАФИКА
«ПАСПОРТНАЯ ДИАГРАМА СУДНА»
Базовыми зависимостями графика следует считать кривые действия движителей судна (см. п. 4.3 и рис. 4.1). Кроме того, на график наносятся кривые изменения силы сопротивления движению судна  при типовых условиях его движения и загрузки.
при типовых условиях его движения и загрузки.
При наличии кривой силы сопротивления движению судна график может быть использован для определения как максимальной в этом случае скорости хода судна так и скорости, соответствующей другому допустимому режиму работы главной энергетической установки.
В эксплуатационных условиях кривая  изменяется в зависимости от:
изменяется в зависимости от:
– путевых условий (наличие ветрового волнения, мелководья, глубокая вода, движение в битом льду и др.);
– загрузки судна (судно при полной загрузке, судно порожнем, порожнем с балластом и др.;
– состояния поверхности корпуса в подводной части (чистый корпус, корпус подвергшийся обрастанию, коррозии или местным деформациям и др.).
В данной работе, в качестве примера, необходимо определить максимальную скорость движения судна и соответствующую мощность двигателя применительно к трем эксплуатационным случаям:
· ход судна с полной загрузкой (осадка Т квл) на глубокой воде (на рис. 4.1 кривая «а»);
· ход порожнего судна (Т пор < Т квл) на глубокой воде (на рис. 4.1 кривая «б»);
· ход судна с полной загрузкой на мелководье (на рис. 4.1 кривая «в»).
Для построения кривой «а» значения  даны в задании на выполнение работы; для кривых «б» и «в» зависимости находятся относительно аналогичной кривой «а» следующим образом. Известно, что по сравнению со случаем движения судна с полной загрузкой на глубокой воде сопротивление его движению становится меньше, когда оно движется на глубокой воде без груза (порожнем) и, другой случай, сопротивление становится больше, если судно с полной загрузкой движется в условиях мелководья.
даны в задании на выполнение работы; для кривых «б» и «в» зависимости находятся относительно аналогичной кривой «а» следующим образом. Известно, что по сравнению со случаем движения судна с полной загрузкой на глубокой воде сопротивление его движению становится меньше, когда оно движется на глубокой воде без груза (порожнем) и, другой случай, сопротивление становится больше, если судно с полной загрузкой движется в условиях мелководья.
В соответствии с этим для получения точек кривой «б» при ряде значений скорости хода (v) соответствующие ординаты кривой «а» следует умножить на 0,75, а для получения кривой «в» ординаты кривой «а» следует умножить на 1,25. Полученные таким образом зависимости наносятся на «поле сил» графика (рис. 4.1).
С использованием кривых «а», «б» и «в» следует определить максимальную скорость хода судна и развиваемую двигателем мощность: эти показатели вносятся в табл. 5.1.
На «поле мощностей» для каждого из рассматриваемых случаев изображается соответствующая кривая – винтовая характеристика двигателя. Порядок получения точек для построения такой кривой показан на рис. 4.1, применительно к кривой «а». При этом в качестве исходных используются точки пересечения кривой «а» и кривых  «поля сил».
«поля сил».
Таблица 5.1

