




На большинстве легких ВС устанавливается поршневой двигатель с ВВ. Поршневой двигатель – это двигатель внутреннего сгорания, в котором энергия расширяющихся газов, полученная в результате сгорания топлива, преобразуется в механическую работу возвратно-поступательного движения поршня. За последние годы поршневая технология была усовершенствована за счёт внедрения компьютеризированных систем управления двигателем. Системы управления двигателем уменьшают расход топлива, оптимизируют работу двигателя и упрощают работу пилота. Последние достижения связаны с созданием авиадвигателя, работающем как автомобильный на дизельном топливе. Такой двигатель может работать на авиационном керосине, что уменьшает стоимость топлива, а значит и стоимость летного часа. Дизельные авиадвигатели компании TAE устанавливаются на DA40, DA42, PA-28. На ВС с такими двигателями применяется электронно-цифровая система управления, упрощающая процесс управления двигателем и воздушным винтом.
Воздушный винт изменяемого шага (ВИШ) является ВВ, который управляется механизмом регулятора шага таким образом, чтобы сохранить постоянную частоту вращения винта при изменении аэродинамической нагрузки (высоты, температуры, давления, скорости и т.д.). На большинстве легких ВС установлены именно ВИШ, главным преимуществом которых является высокий КПД в широком диапазоне воздушных скоростей и позволяет выбрать (и поддерживать) необходимую частоту вращения двигателя в различных условиях полета.
Механизм управления углом установки лопасти (регулятор постоянства оборотов) изменяет шаг винта; при этом КПД ВВ близок к максимальному в широком диапазоне эксплуатационных условий; тяга ВИШ будет больше, чем у ВФШ при прочих равных условиях. Коэффициент полезного действия ВВ для ВИШ реализуется для разных эксплуатационных условий при разных углах установки лопасти. Значение ηв для легких ВС в диапазоне от 0.75 до 0.91. Зависимость ηв от λ для разных углов установки представлена на рис. 2. Зависимость КПД ВИШ представляет собой огибающую кривых КПД множества винтов ВФШ с углами установки лопасти от φmin до φmax. КПД и тяга изолированного винта всегда больше КПД и тяги ВВ на самолете на 25-30%. Часть получаемой от двигателя мощности расходуется на перемещение самолета и равна PвV; остальная мощность двигателя затрачивается на преодоление сопротивления в струе, интерференцию винта и самолета, на закручивание струи и прочие потери, т.о. режим работы винта (т.е. φ) должен соответствовать режиму полета (V). В этом случае лопасти винта будут работать на наивыгоднейшем угле атаки, давая максимальный КПД.
φ – угол установки лопасти
λ – относительная поступь

|

Рис. 2 Зависимость КПД ηв ВИШ от скорости;
КПД винта зависит от высоты полета. Частота вращения ВВ в полете поддерживается постоянной, поэтому при уменьшении плотности воздуха с высотой, а значит и момента сопротивления ВВ, угол установки лопасти φ необходимо увеличивать для сохранения равенства Mдв = Mв; т.о. при увеличении φ Mв возрастает и компенсируется его уменьшение с высотой. Максимальное ηв (см. рис. 2) при бόльшем угле установки достигается при бόльшей скорости. Т.о. при увеличении высоты полета и неизменной скорости ηв уменьшается.
КПД ВВ зависит и от режима работы двигателя. Наивыгоднейший угол атаки на лопастях ВВ достигается при определенном (заданном в РЛЭ) сочетании частоты вращения ВВ nв, угла установки лопасти φм, скорости полета V. Такое сочетание должно соответствовать каждому режиму работы двигателя. Каждой скорости полета должна соответствовать своя мощность двигателя, тогда на лопастях винта сохранится наивыгоднейший угол атаки и максимальное ηв у ВВ.
 Диапазон изменения углов установки лопасти ВВ определяет тип ВВ. Флюгерным ВВ называется ВИШ, лопасти которого могут быть установлены по потоку. При этом углы установки лопасти обычно 85-90˚. Обычно такие винты устанавливаются на многодвигательные ВС (DA42) с целью уменьшения лобового сопротивления ВВ неработающего двигателя. При отказе двигателя винт, находящийся на обычных углах установки, вращаясь от набегающего потока может создавать значительное сопротивление и на малых углах установки
Диапазон изменения углов установки лопасти ВВ определяет тип ВВ. Флюгерным ВВ называется ВИШ, лопасти которого могут быть установлены по потоку. При этом углы установки лопасти обычно 85-90˚. Обычно такие винты устанавливаются на многодвигательные ВС (DA42) с целью уменьшения лобового сопротивления ВВ неработающего двигателя. При отказе двигателя винт, находящийся на обычных углах установки, вращаясь от набегающего потока может создавать значительное сопротивление и на малых углах установки
| Рис. 3 |
Управление ВИШ в полете
На лопасть ВВ при его вращении действует аэродинамические и центробежные силы. Аэродинамическая сила действует на каждое сечение лопасти и создает момент  , направленный на увеличение угла установки лопасти. (рис. 3)
, направленный на увеличение угла установки лопасти. (рис. 3)
При вращении ВВ на каждый элемент лопасти, расположенный на расстоянии r от оси вращения, действуют центробежные силы  и
и  , направление которых не совпадают с плоскостью вращения.
, направление которых не совпадают с плоскостью вращения.
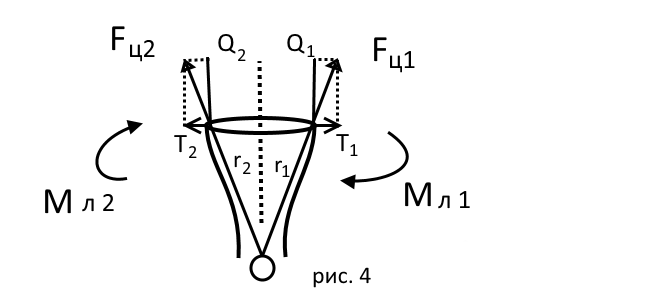
Проекции центробежных сил на ось поворота лопасти  и
и  стремятся вырвать лопасть, так как создают силу, направленную вдоль оси лопасти; действие этих сил требует усиления корневых сечений лопасти для обеспечения необходимой прочности ВВ. (рис.4)
стремятся вырвать лопасть, так как создают силу, направленную вдоль оси лопасти; действие этих сил требует усиления корневых сечений лопасти для обеспечения необходимой прочности ВВ. (рис.4)

Проекции  и
и  создают моменты, стремящиеся повернуть лопасть в сторону уменьшения угла установки лопасти (рис.5). Величина этого момента зависит от массы лопасти, числа оборотов, угла установки. Аэродинамические моменты по своей величине меньше инерционных. У корня лопасти находятся противовесы, создающие моменты
создают моменты, стремящиеся повернуть лопасть в сторону уменьшения угла установки лопасти (рис.5). Величина этого момента зависит от массы лопасти, числа оборотов, угла установки. Аэродинамические моменты по своей величине меньше инерционных. У корня лопасти находятся противовесы, создающие моменты  инерционных сил N, бо́льшие чем инерционные моменты лопастей и стремящиеся повернуть лопасть на большой шаг.
инерционных сил N, бо́льшие чем инерционные моменты лопастей и стремящиеся повернуть лопасть на большой шаг.
 Для того, чтобы обеспечить требуемый угол установки лопасти применяются гидравлические механизмы, управляющие поворотом лопасти с помощью гидромеханизма, находящегося во втулке винта. В зависимости от принципов увеличения и уменьшения угла установки лопасти выделяются прямая, обратная и двусторонняя схемы управления.
Для того, чтобы обеспечить требуемый угол установки лопасти применяются гидравлические механизмы, управляющие поворотом лопасти с помощью гидромеханизма, находящегося во втулке винта. В зависимости от принципов увеличения и уменьшения угла установки лопасти выделяются прямая, обратная и двусторонняя схемы управления.
- прямая схема управления: на малый шаг лопасти переводятся центробежными силами лопасти и действием давления масла; на большой шаг моментами центробежных сил противовесов и аэродинамических сил (гидроцентробежный принцип действия); эта схема применяется достаточно широко. Ее достоинство в том, что при отказе гидромеханизма происходит увеличение угла установки лопасти, что препятствует раскрутке винта (Як-18Т).
- обратная схема: на малый шаг лопасти переводятся моментом от центробежных сил, на большой – моментами аэродинамических сил и давлением масла.
- двусторонняя схема: на малый шаг переводятся давлением масла и моментом центробежных сил лопастей; на большой – моментами центробежных сил противовесов, моментами аэродинамических сил и давлением масла. 
Измение шага ВИШ обеспечивается работой центробежного регулятора постоянства оборотов (РПО). У РПО имеется элемент включающий пружину и вращающиеся грузики. При заданных оборотах ВВ центробежная сила грузиков и сила затяжки пружины уравновешены.
При изменении режима полета винт изменяет угол установки и, как следствие, изменяются обороты в системе «винт-двигатель». Соответственно изменяются обороты центробежного регулятора – нарушается равновесие между центробежными силами грузиков и силой затяжки пружины. Связанный с грузиками специальный золотник перемещается, открывая канал подачи или слива масла в зависимости от схемы управления гидромеханизма. В результате угол установки лопасти начинает меняться, пока не возникает равенство сил в регуляторе оборотов.
Центробежные грузики на малых оборотах (≈1300-1400 об/мин) создают центробежные силы, недостаточные для перемещения золотника вверх; вследствие этого невозможно перевести ВВ на большой шаг при частоте вращения вала двигателя порядка 1300 об/мин.
Диапазон углов поворота лопасти ограничивается цифрами высокого и низкого шага; если лопасть достигает одного из этих углов, винт будет работать как ВФШ.
На ВС с ВИШ имеется два органа управления: ручка управления двигателем (РУД) и ручка управления шагом винта (РУШВ). РУД управляет мощностью двигателя, а РУШВ – оборотами.
При изменении угла установки лопасти РУШВ изменяется момент сопротивления ВВ  и нарушается равенство
и нарушается равенство  , в результате чего обороты изменяются. Установленные пилотом обороты и равенство будут поддерживаться за счет автоматического изменения угла установки лопасти с помощью РПО.
, в результате чего обороты изменяются. Установленные пилотом обороты и равенство будут поддерживаться за счет автоматического изменения угла установки лопасти с помощью РПО.
На ВС с таким управлением (DV20, Як-18, Як-52, Як-55) полезная мощность двигателя контролируется РУД и отображается на манометре наддува. Наддув – абсолютное давление воздушно-топливной смеси внутри впускного коллектора. Полезная мощность двигателя зависит от количества воздушно-топливной смеси, поступающей в камеру сгорания. При увеличении РУД в двигатель поступает большее количество смеси и наддув возрастает. При выключенном двигателе манометр показывает давление окружающего воздуха. Для работы ВВ на заданных оборотах должен быть обеспечен соответствующий наддув. При изменении оборотов и давления наддува должен сохраняться определенный порядок изменения мощности и оборотов.
Для ВС, оборудованных системой управления двигателем, таких как DA-40 и DA-42 пилот управляет только РУД.

