




В левом нижнем углу графической зоны экрана высвечивается пиктограмма текущей системы координат. По этой пиктограмме видно, какая из систем активизирована в данное время (рис. 3.1).


Рис.3.1 Пиктограммы мировой и пользовательской систем координат.
Способы заданияточек
 При формировании чертежа точки задаются следующими способами: курсором;
При формировании чертежа точки задаются следующими способами: курсором;
заданием координат;
с помощью объектных привязок; по направлению - расстоянию;
с помощью координатных фильтров.
Задание точеккурсором
 Задание точки курсором производится щелчком левой кнопки мыши (ЛКМ) на графическом поле чертежа. При задании точек курсором необходимы предварительные настройки графического редактора для гарантии точности задания точек, т.е. для гарантии точности размеров модели. Исключением является задание начальных точек, которые определяют только местонахождение чертежа на поле.
Задание точки курсором производится щелчком левой кнопки мыши (ЛКМ) на графическом поле чертежа. При задании точек курсором необходимы предварительные настройки графического редактора для гарантии точности задания точек, т.е. для гарантии точности размеров модели. Исключением является задание начальных точек, которые определяют только местонахождение чертежа на поле.
Задание точек с помощьюкоординат
При задании координат в рамках текущей системы координат (мировой или пользовательской) возможно использование следующих координат:
абсолютных;
 относительных.
относительных.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

 |

 x
x
 |
 |
 |

 Относительные координаты: точка задается относительно последней введенной точки.
Относительные координаты: точка задается относительно последней введенной точки.
| Название | В общем виде, пример | Рисунок | |
| Прямоугольные | Относительные двухмерные | @ dx,dy @ 50,23 Символ @ получается одновременным нажатием клавиш «Shift» + «2». | y 55 dy 32 dx 0 25 75 x |
| Относительные трехмерные | @ dx,dy,dz @ 50,23,45 | z 1 x y z x 2 0 y | |
| Полярные | Относительно- полярные двухмерные | @R< @10<30 |
|
| где: | |||
| -угол наклона радиуса относительно оси ОХ, проведенной через последнюю точку | |||
| Относительно- цилиндрические трехмерные | @R<,H @10<30,50 | ||
| Относительно- сферические трехмерные | @R< < @10<30,50 | ||

3.2.3. 

 Задание точек с помощью объектнойпривязки
Задание точек с помощью объектнойпривязки
Объектная привязка это способ задания точек с помощью использования точек имеющихся объектов или самих объектов. Этот способ позволяет использовать для дальнейших построений такие точки, как, например, середина имеющегося отрезка или дуги, центр круга или дуги, пересечения линий и т.д.
Основные объектные привязки и соответствующие им кнопки панели инструментов перечислены ниже:
| Пиктог рамма | Возмо жное сокра щение | Название | Пояснение |

| то | точка отслеживания | создание временной точки для объектной привязки. |

| от | смещение | режим "Смещение" позволяет устанавливать временную опорную точку в качестве базовой с последующим заданием смещения относительно ее. |

| кон | конечная точка | конечная точка отрезка, дуги, мультилинии, сегмента полилинии, сплайна, области или луча или к ближайшему углу полосы, фигуры или 3D грани. |

| сер | середина | точка середины отрезка, дуги, мультилинии, сегмента полилинии, области, фигуры, сплайна или прямой. |

| пер | пересечение | точка пересечения отрезков, дуг, окружностей, эллипсов, мультилиний, полилиний, лучей, границ областей, сплайнов или прямых. Примечание: В режиме "Пересечение" не осуществляется привязка к ребрам или углам 3D тел. |

| каж | кажущееся пересечение | кажущееся пересечение двух объектов, которые не лежат в одной плоскости, но выглядят пересекающимися на текущем виде. |

| про | продолжение | продолжение к воображаемому продолжению отрезка, или дуги. |

| цен | центр | центр круга. дуги, эллиптической дуги, эллипса необходимо указывать на дугу или круг, а не на их центр). |

| ква | квадрант | точка квадранта дуги, круга, эллиптической дуги, эллипса (0, 90, 180, 270 градусов). |

| кас | касательная | пересечение касательной с дугой, кругом, эллиптической дугой, эллипсом или сплайном. |

| нор | нормаль | пересечение нормали с отрезком, дугой, кругом, эллипсом, эллиптической дугой, мультилинией, полилинией, лучом, границей области, фигурой, сплайном или прямой. |

| пар | параллельно | обеспечивает параллельность линейного сегмента, сегмента полилинии, луча или прямой относительно другого линейного объекта. После указания первой точки линейного объекта, укажите привязку к параллельному объекту. |

| твс | точка вставки | точка вставки текста, блока, формы или атрибута. |

| узе | узел | точка, определяющая точку размера или начальная точке размерного текста. |

| бли | ближайшая | ближайшая точка отрезка, дуги, круга, эллипса, эллиптической дуги, мультилинии, объекта-точки, полилинии, луча, сплайна или прямой. |
Объектная привязка может быть зафиксированной и разовой.
Работасразовойпривязкойзаключаетсявследующем:вответназапрос
― введи …точку: ” задается нужный тип привязки путем набора на клавиатуре соответственно трех букв сокращенного названия привязки или нажатием соответствующей кнопки на соответствующей панели инструментов. К курсору в этот момент добавляется специальный указатель ‖прицел‖ и начинается поиск в пределах ―прицела‖ точки, удовлетворяющей заданной объектной привязки.
В режиме зафиксированной объектной привязки поиск искомой точки происходит постоянно, и при ее обнаружении система делает отметки значками выбранной привязки. В случае, когда в ―прицел‖попадает несколько точек, удовлетворяющих фиксации, система выберет ту из них, которая находится ближе к центруприцела.
Для установки режима фиксации объектных привязок необходимо их назначить на третьей вкладке Сервис / Режимы рисования / Объектная привязка (рис. 3.2) и в дальнейшем Вкл/Выкл их по мере надобности с помощью функциональной клавиши <F3> или соответствующей кнопки в строкесостояния
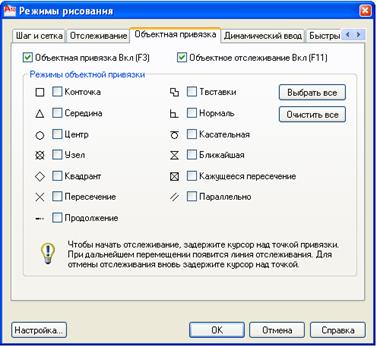 |
Рис.3.2 Вид окна <Режимы рисования>. Вкладка <Объектная привязка>.
Для фиксации объектной привязки необходимо поставить «галочку» в соответствующем окне. Не рекомендуется фиксировать слишком много привязок из- за трудностей отслеживания точек.
При трехмерном моделировании предпочтение отдается привязке конечная точка, а в твердотельном моделировании пользуются преимуществом три объектные привязки: кон, сер и цен.
Задание точек по направлению -расстоянию
Задание точки по направлению - расстоянию предполагает назначение направления движения курсора с помощью режимов рисования (раздел 3.3), а расстояние от предыдущей точки задается набором числа с клавиатуры или с помощью счетчика координат (если включить режим показа размеров).
Задание точек с помощью координатныхфильтров
Координатные фильтры - это способ получения точки с помощью поэтапного задания ее координат. Они в сочетании с объектными привязками позволяют извлекать значения координат точек существующих объектов и формировать из них новую точку.
Координатные фильтры бывают:
 точечные (координаты новой точки задаются путем задания координат отдельно по каждой из осей X, Y,Z)
точечные (координаты новой точки задаются путем задания координат отдельно по каждой из осей X, Y,Z)
плоскостные фильтры - для трехмерных точек (координаты новой точки задаются путем задания ее проекции на одной из координатных плоскостей, а оставшаяся координата задается абсолютнымзначением).
Координатные фильтры вводятся в командной строке в ответ на запрос ввода точки путем набора с клавиатуры или с панели инструментов: .x.y.z.xy.xz.yz.
Пример 1: Задать точку А, используя ее проекцию на плоскость XOY(рис.3.3).
 Z
Z
Y
X
Рис.3.3 Пример использования плоскостных координатных фильтров
Алгоритм:
...точка: .xy (предупреждаем систему, что будем задавать проекцию искомой точки на плоскость XOY )
of: (указатькурсоромточку―a‖наплоскостиXOY-нагоризонтальнойпроекции) требуется Z: h (h - это высота, на которую удалена точка А от плоскости XOY, задается числом в абсолютныхкоординатах).
Пример 2. Задать точку А в середине верхней грани параллелепипеда, используя фильтры (рис. 3.4).
 3
3
X
Рис.3.4 Пример использования точечных координатных фильтров
Алгоритм:
…точка: .x (предупреждаем систему, что будем задавать координату X искомой точки)
of: сер
(координата X т.А равна координате Х середины любого ребра, которые идут вдоль оси OX, в данном случае это ребра 1-4 или 2-3)
of: (указать курсором ребро 1-4 или2-3)
требуется YZ: .y (будем определять координату Y искомой точки)
of: сер
(координата Y т.А равна координате Y середины любого ребра, которые идут вдоль оси ОY, в данном случае это ребра 1-2 или 3-4)
of: (указать курсором ребро 1-2 или3-4)
требуется Z: кон
(координата Z т.А равна координате Z верхней конечной точке любого из вертикальных ребер)
of: (указать курсором точку 1 или 2 или 3 или 4)

