Исследование Universal Bridge Универсальный мост.
Блок настройки параметров имеет следующий вид:
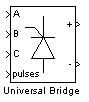
Параметры блока:
Number of bridge arms:
[Число плеч моста]. Выбирается из списка: 1, 2 или 3.
Port configuration:
[Конфигурация портов]. Параметр определяет какие зажимы порта будут входными, а какие - выходными.
Значение параметра выбирается из списка:
ABC as input terminals - зажимы A, B и C являются входными,
ABC as output terminals - зажимы A, B и C являются выходными.
Snubber resistance Rs (Ohm):
[Cопротивление демпфирующей цепи (Ом)].
Snubber capacitance Cs (F):
[Емкость демпфирующей цепи (Ф)].
Power Electronic device:
[Вид полупроводниковых устройств моста]. Значение параметра выбирается из списка:
Diodes - диоды,
Thyristors - тиристоры,
GTO / Diodes - полностью управляемые тиристоры, шунтированные обратными диодами,
MOSFET / Diodes - MOSFET- транзисторы, шунтированные обратными диодами,
IGBT / Diodes - IGBT-транзисторы, шунтированные обратными диодами,
Ideal Switches - идеальные ключи.
Measurements:
[Измеряемые переменные]. Параметр позволяет выбрать, передаваемые в блок Multimeter, переменные, которые затем можно
увидеть с помощью блока Scope. Значения параметра выбираются из списка:
None - нет переменных для отображения,
Device voltages - напряжения на полупроводниковых устройствах,
Device currents - токи полупроводниковых устройств,
UAB UBC UCA UDC voltages - напряжения на зажимах моста.
All voltages and currents - все напряжения и токи моста.
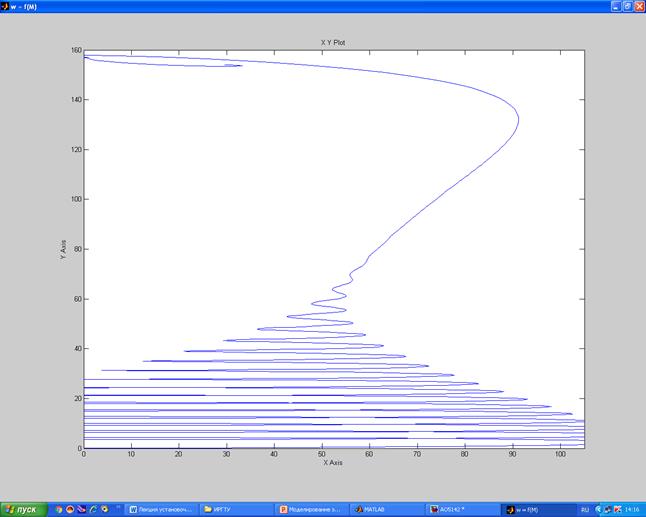
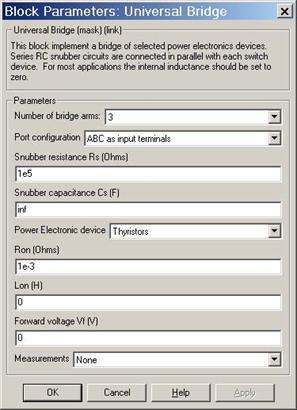
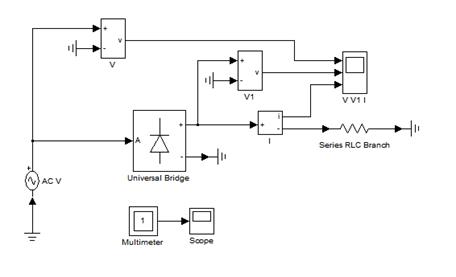
Рассмотрим первую схему:

Построим графики результатов моделирования. Для этих целей отправим результаты моделирования в рабочую область MATLAB и используем команду plot.
Модифицируем исходную модель следующим образом:
И в командном окне MATLAB подадим следующие команды:
>> subplot(3,1,1); plot(t,v)
>> subplot(3,1,2); plot(t,v1)
>> subplot(3,1,3); plot(t,i

Рассмотрим работу такого измерительного прибора как Multimeter. Изменим модель следующим образом.
Разберёмся с параметрами настройки данного блока.
Модифицируем модель.

Изменим схему:

Рассмотрим работу однофазного выпрямителя:

Работа данной схемы на активно индуктивную нагрузку:

Следующим этапом возьмём в качестве силового полупроводникового элемента тиристор. Выберем в параметрах настройки тиристор и оставим чисто индуктивную нагрузку.

Пиктограмма асинхронная машина SimPowerSystems Simulink.

Моделирует асинхронную электрическую машину в двигательном или генераторном режимах. Режим работы определяется знаком электромагнитного момента машины.
Порты модели A, B и С являются выводами статорной обмотки машины, а порты а, b и с - обмотки ротора машины. Порт Tm предназначен для подачи момента сопротивления движению. На выходном порту m формируется векторный сигнал, состоящий из 21 элемента: токов, потоков и напряжений ротора и статора в неподвижной и вращающейся системах координат, электромагнитного момента, скорости вращения вала, а также его углового положения. Для удобства извлечения переменных машины из вектора в библиотеке SimPowerSystems предусмотрен блок MachinesMeasurement Demux. Модель асинхронной машины включает в себя модель электрической части, представленной моделью пространства состояний четвертого порядка и модель механической части в виде системы второго порядка. Все электрические
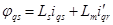
переменные и параметры машины приведены к статору. Исходные уравнения электрической части машины записаны для двухфазной (dq-оси)системе координат. На рисунке приведена схема замещения машины и ее уравнения

 ,
,
 ,
,
 ,
,
 ,
,
Где:
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
Индексы в системе уравнений машины имеют следующие значения:
d - проекция переменной на ось d,
q - проекция переменной на ось q,
r - переменная или параметр ротора,
s - переменная или параметр статора,
L - индуктивность рассеяния,
m - индуктивность цепи намагничивания.
Механическая часть машины описывается двумя уравнениями:
 ,
,
 .
.
Переменные в уравнениях машины имеют следующие значения:
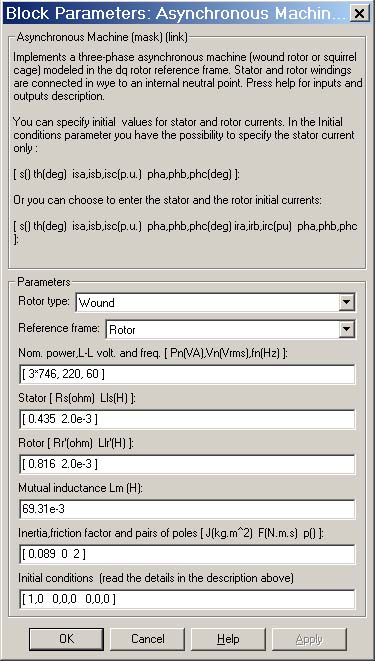
 -сопротивление и индуктивность рассеяния статора,
-сопротивление и индуктивность рассеяния статора,
 -сопротивление и индуктивность рассеяния ротора,
-сопротивление и индуктивность рассеяния ротора,
 -индуктивность цепи намагничивания,
-индуктивность цепи намагничивания,
 -полные индуктивности статора и ротора,
-полные индуктивности статора и ротора,
 - проекции напряжения и тока статора на ось q,
- проекции напряжения и тока статора на ось q,
 - проекции напряжения и тока ротора на ось q,
- проекции напряжения и тока ротора на ось q,
 - проекции напряжения и тока статора на ось d,
- проекции напряжения и тока статора на ось d,
 - проекции напряжения и тока ротора на ось d,
- проекции напряжения и тока ротора на ось d,
 - проекции потокосцепления статора на оси d и q,
- проекции потокосцепления статора на оси d и q,
 - проекции потокосцепления ротора на оси d и q,
- проекции потокосцепления ротора на оси d и q,
 - угловая скорость ротора,
- угловая скорость ротора,
 - угловое положение ротора,
- угловое положение ротора,
p - число пар полюсов.
В Simulink прототипом модели асинхронной машины можно ознакомиться, открыв библиотеку powerlib_models.mdl в папке:toolbox\powersys\powersys.
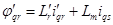
Окно задания параметров.
Параметры блока:
Rotor type:
[Тип ротора]. Значение параметра выбирается из списка:
· Squirrel-Cage -короткозамкнутый ротор или <беличья клетка>,
· Wound - фазный ротор.
Reference frame:
[Система координат]. Значение параметра выбирается из списка:
· Rotor - неподвижная относительно ротора,
· Synchronous - вращающаяся вместе с полем.
Nom. power, L-L volt. and frequency[Pn(VA), Un(V), fn(Hz)]:
[Номинальная мощность Pn (ВА),действующее линейное напряжение Un (В) и номинальная частота fn (Гц)].
Stator [Rs(Ohm) Lls(H)]:
[Сопротивление Rs (Ом)и индуктивность Ls (Гн) статора].
Rotor [Rr(Ohm) Llr'(H)]:
[Сопротивление Rs (Ом) индуктивность Ls (Гн) ротора].
Mutual inductance Lm(H):
[Взаимная индуктивность (Гн)].
Inertia, friction factor and pairs ofpoles [J(kg*m^2) F(N*m*s) p]:
[Момент инерции J (кг*м^2),коэффициент трения F (Н*м*с) и число пар полюсов p].
Initial conditions [ s th(deg) isa, isb, isc (A) phA,phB,phC(deg)]:
[Начальные условия].Параметр задается в виде вектора каждый элемент которого имеет следующие значения:
s - скольжение,
th - фаза (град.),
isa, isb, isc - начальные значения токов статора (А),
phA, phB, phC - начальные фазы токов статора (град.)].