




Ќа рис. рис. 6 приведена схема подпрограммы вычислени€ псевдопроекции  из целевой точки
из целевой точки  на пересечение многогранника
на пересечение многогранника  с €чейкой сеточной области, имеющей пор€дковый номер
с €чейкой сеточной области, имеющей пор€дковый номер  , где вычисл€етс€ по формуле. ѕсевдопроекци€ вычисл€етс€ путем организации фейеровского процесса.
, где вычисл€етс€ по формуле. ѕсевдопроекци€ вычисл€етс€ путем организации фейеровского процесса.
–ис. 6. —хема подпрограммы π вычислени€ псевдопроекции.
Ќа шаге 1 выполн€етс€ инициализаци€ переменных, необходимых дл€ организации итерационного процесса. ¬ качестве начального значени€  беретс€ точка ; с помощью подпрограммы zero (см. рис. 4) вычисл€етс€ нулева€ вершина
беретс€ точка ; с помощью подпрограммы zero (см. рис. 4) вычисл€етс€ нулева€ вершина  €чейки с номером ; по формуле определ€етс€ вариативна€ часть
€чейки с номером ; по формуле определ€етс€ вариативна€ часть  расширенного столбца
расширенного столбца  системыограничений, получаемой при пересечении многогранника
системыограничений, получаемой при пересечении многогранника  с €чейкой
с €чейкой  . ¬ цикле 2 вычисл€етс€ normsq Ц вектор квадратов норм строк расширенной матрицы
. ¬ цикле 2 вычисл€етс€ normsq Ц вектор квадратов норм строк расширенной матрицы  :
:  .
.
Ќа шаге 3 организуетс€ итерационный процесс вычислени€ псевдопроекции. ƒл€ обеспечени€ высокой масштабируемости процедуры вычислени€ псевдопроекции используетс€ метод разбиени€ вектора  на
на  подвекторов размерности
подвекторов размерности  , предложенный в работе [7]. ћы здесь предполагаем, что
, предложенный в работе [7]. ћы здесь предполагаем, что  . Ќа каждом v -том подвекторе делаетс€
. Ќа каждом v -том подвекторе делаетс€  независимых итераций вида
независимых итераций вида

”казанна€ формула получаетс€ из формулы путем ограничени€ действи€ фейеровского отображени€  на соответствующий подвектор. ѕодпрограмма
на соответствующий подвектор. ѕодпрограмма  вносит изменени€ в исходные данные с периодом в
вносит изменени€ в исходные данные с периодом в  секунд ( Ц положительное число, которое может принимать значени€ меньше единицы).
секунд ( Ц положительное число, которое может принимать значени€ меньше единицы).
»терационный процесс заканчиваетс€, когда рассто€ние между двум€ последними приближени€ми  и
и  будет меньше
будет меньше  . Ќа четвертом шаге подпрограмма
. Ќа четвертом шаге подпрограмма  (см. рис. 7) провер€ет принадлежность найденной точки псевдопроекции €чейке с номером . ≈сли не принадлежит €чейке с номером , то
(см. рис. 7) провер€ет принадлежность найденной точки псевдопроекции €чейке с номером . ≈сли не принадлежит €чейке с номером , то  присваиваетс€ значение
присваиваетс€ значение  .
.
–ис. 7. —хема подпрограммы in,
провер€ющей принадлежность точки x €чейке с номером k 𝛼.
ѕеременна€  в подпрограмме
в подпрограмме  на рис. 7 задает длину ребра €чейки. ≈е значение определ€етс€ на шаге 11 подпрограммы
на рис. 7 задает длину ребра €чейки. ≈е значение определ€етс€ на шаге 11 подпрограммы  (см. рис. 5.). онстанта
(см. рис. 5.). онстанта  задает малое положительное число, позвол€ющее корректно обрабатывать приближенные значени€.
задает малое положительное число, позвол€ющее корректно обрабатывать приближенные значени€.
ћодельный пример
ћодельный пример имеет следующий вид.
÷елева€ функци€  .
.
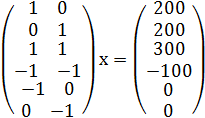
¬ыбор начальной точки  вли€ет на результат (на точку псевдопроекции). ѕоложим
вли€ет на результат (на точку псевдопроекции). ѕоложим  при начальной точке
при начальной точке  мы получаем результат
мы получаем результат  , совпадающий с точным решением. Ќо, дл€
, совпадающий с точным решением. Ќо, дл€  получаем результат
получаем результат  . ”казанна€ точка лежит на границе многогранника, но не €вл€етс€ удовлетворительным приближением к точному решению.
. ”казанна€ точка лежит на границе многогранника, но не €вл€етс€ удовлетворительным приближением к точному решению.
¬ывод: необходимо вычисл€ть псевдопроекции дл€ начальных точек  ,
,  и брать в качестве результата псевдопроекцию, в которой достигаетс€ максимум целевой функции.
и брать в качестве результата псевдопроекцию, в которой достигаетс€ максимум целевой функции.

ѕолученные результаты
Ѕыла написана программа на €зыке программировани€ —++ с использованием библиотеки OpenMP, реализующа€ сеточный алгоритм решени€ задачи линейного программировани€ (ѕриложение 2). ѕрограмма вычисл€ет решение задачи с заданной точностью. »з плюсов можно отметить возможность изменени€ исходных данных в процессе работы программы. роме того, алгоритм допускает эффективное распараллеливание на многопроцессорных системах с массовым параллелизмом. »з минусов можно отметить медленную сходимость и чувствительность к настройке параметров алгоритма.
|
|
|
—писок литературы
1). Ѕердникова ≈.ј. ѕараллельный алгоритм решени€ задачи линейного программировани€ на основе оператора проектировани€ на линейное многообразие // ¬ысокопроизводительные вычислени€ и их приложени€: “руды ¬сероссийск. науч. конф. (30 окт€бр€ - 2 но€бр€ 2000 г., г. „ерноголовка). ћ.: »зд-во ћ√”. 2000. C. 71-72.
2). Ѕердникова ≈.ј., ≈рЄмин ».»., ѕопов Ћ.ƒ. –аспределенные фейеровские процессы дл€ систем линейных неравенств и задач линейного программировани€ // јвтоматика и телемеханика. No. 2. 2004. —. 16-32.
3). ¬асин ¬.¬., ≈ремин ».». ќператоры и итерационные процессы фейеровского типа. “еори€ и приложени€. ≈катеринбург: ”рќ –јЌ, 2005. 210 с.
4). ¬оеводин ¬л.¬., апитонова ј.ѕ. ћетоды описани€ и классификации архитектур вычислительных систем. Цћ: »зд-во ћ√”, 1994. 103 с.
5). ¬оеводин ¬.¬., ¬оеводин ¬л.¬. ѕараллельные вычислени€. —ѕб.: Ѕ’¬-ѕетербург, 2002. 600 с.
6). √аранжа ¬.ј., √оликов ј.»., ≈втушенко ё.√., Ќгуен ћ.’. ѕараллельна€ реализаци€ метода Ќьютона дл€ решени€ больших задач линейного программировани€ // ∆урнал вычислительной математики и математической физики. 2009. “. 49. є 8. —. 1369-1384.
7). ≈ршова ј.¬., —околинска€ ».ћ. ќ сходимости масштабируемого алгоритма построени€ псевдопроекции на выпуклое замкнутое множество // ¬естник ё”р√”. —ери€ "ћатематическое моделирование и программирование". 2011. No. 37(254), вып. 10. C. 12-21.
8). √орелик A.Ћ., √уревич ». Ѕ., —крипкин ¬. ј. —овременное состо€ние проблемы распознавани€: Ќекоторые аспекты. ћ.: –адио и св€зь, 1985. 161 с.
ƒанциг ƒж. Ћинейное программирование, его применение и обобщени€. ћ.: ѕрогресс, 1966. 600 с.
9). ƒжексон ѕ. ¬ведение в экспертные системы. ћ: »здательский дом "¬иль€мс", 2001. 624 с.
10). ≈ремин ».». ‘ейеровские методы дл€ задач выпуклой и линейной оптимизации. „ел€бинск: »зд-во ё”р√”, 2009. 200 с.
ѕриложение 1
ќсновные обозначени€ дл€ сеточного алгоритма
| ќбозначение | «начение |

| ћатрица коэффициентов системы неравенств в задаче Ћѕ |

| –асширенна€ матрица (матрица пересечени€ многогранника с €чейкой 𝛼); имеет размер  ; получаетс€ из A путем приписывани€ снизу коэффициентов неравенств системы ; получаетс€ из A путем приписывани€ снизу коэффициентов неравенств системы
|

| столбец свободных членов (правых частей) неравенств |
|
| расширенный столбец (столбец правых частей пересечени€ многогранника с €чейкой 𝛼); имеет размер  получаетс€ из b путем приписывани€ снизу вектора правых частей неравенств системы получаетс€ из b путем приписывани€ снизу вектора правых частей неравенств системы
|

| вариативна€ часть расширенного столбца системы ограничений, получаемой при пересечении многогранника с €чейкой .
|
| c | вектор коэффициентов целевой функции |
| C | максимум значений целевой функции |
| dataChange(t) | подпрограмма изменени€ исходных данных с периодом в t секунд (t может принимать значени€ меньше 1) |
| σ | значение целевой функции в точке xk |
| ε | точность приближени€ при вычислении псевдопроекции (используетс€ следующий критерий завершени€ фейеровского процесса:  ) )
|
| g | нулева€ вершина кубической сеточной области |
| G | начальные координаты нулевой вершины g кубической сеточной области |
| γ | целочисленные координаты центральной €чейки |
| init | подпрограмма инициализации переменных |
| factor | множитель  в формуле фейеровского отображени€ в формуле фейеровского отображени€
|
| k | пор€дковый номер €чейки |
| kγ | пор€дковый номер центральной €чейки |
| k𝛼 | пор€дковый номер €чейки 𝛼, на которой достигаетс€ максимум целевой функции; k𝛼 = MinInt соответствует случаю, когда получено пустое множество псевдопроекций |
| K | количество €чеек в сеточной области по одному измерению |
| L | число независимых фейеровских итераций на подвекторах |
| m | число неравенств в системе ограничений |
| MinFloat | минимальное вещественное число, представл€емое в машинной форме |
| MinInt | минимальное целое число, представл€емое в машинной форме |
| n | размерность пространства решений |
| normsq | вектор квадратов норм строк матрицы :
|
| p | количество итераций при построении псевдопроекции, выполн€емое между обновлени€ми входных данных |
| P | количество MPI-процессов |
| π(z, k) | подпрограмма вычислени€ псевдопроекции точки z на пересечение многогранника с €чейкой, имеющей пор€дковый номер k; возвращает точку псевдопроекции xk или вектор (-1,Е), если точка псевдопроекции не принадлежит многограннику |
| q | нулева€ вершина центральной €чейки сеточной области |
| q' | нулева€ вершина новой центральной €чейки сеточной области |
| r | длина ребра сеточной области |
| R | начальное значение r, обеспечивающее покрытие многогранника сеточной областью |
| rank() | системна€ функци€, возвращающа€ количество MPI-процессов |
| s | шаг сетки: 
|
| T | масштабирующий коэффициент дл€ вычислени€ координат целевой точки z |
| w | мультипликативный коэффициент дл€ увеличени€ размера сеточной области |

| псевдопроекци€ на пересечение многогранника с k-той €чейкой; если  , то пересечение многогранника с k-той €чейкой пусто , то пересечение многогранника с k-той €чейкой пусто
|

| предыдуща€ точка в фейеровском процессе |
| y | нулева€ вершина €чейки 𝛼 |
| z | целева€ точка |
| zero(k) | вектор-функци€, вычисл€юща€ нулевую вершину €чейки с пор€дковым номером k |
|
|
|
ѕриложение 2
од программы
#include "include.h"
using namespace std;
int main(int argc, char *argv[]) {
LoadData(); // «агрузка исходных данных из файла input.txt
Init(); // »нициализаци€ переменных
Pi(/*axis*/ 0,/*index*/ 0); // ¬ычисление точки псевдопроекции _x из _z на пересечение с €чейкой с индексом index на оси с номером axis
cout << "x="; for (int j = 0; j<_n; j++) cout << _x[j] << "\t"; cout << endl; fflush(stdout);
printf("\nPress ENTER"); fflush(stdout); getchar();
return 0;
};
static void Init() {// »нициализаци€ переменных
_mc = _m + _n * 2; // оличество неравенств в расширенной системе
assert(_MAX_MC >= _mc);
#ifndef _NO_MPI
MPI_Init(&argc, &argv); // старт MPI
MPI_Comm_rank(MPI_COMM_WORLD, &_rank); // присвоить _rank номер процесса MPI
MPI_Comm_size(MPI_COMM_WORLD, &_size); // присвоить _size количество процессов MPI
#else
_rank = 0;
#endif
// ƒобавл€ем кубик в ј
for (int i = 0; i<_n; i++)
_A[i + _m][i] = -1;
for (int i = 0; i<_n; i++)
_A[i + _m + _n][i] = 1;
_r = _R; // радиус сеточной области
_s = _r / ((_K-1)/2); // длина ребра €чейки
for (int i = 0; i < _n; i++) // координаты целевой точки
_z[i] = _c[i] * _T;
};
static void LoadData() {// «агрузка исходных данных из файла input.txt
FILE *stream;
fpos_t pos;
errno_t errNo = fopen_s(&stream, _INPUT, "r");
if (errNo!= 0) {
cout << "File '" << _INPUT << "' not found!" << endl;
#ifndef _NO_MPI
MPI_Finalize();
#endif
printf("\nPress ENTER"); fflush(stdout); getchar();
abort();
};
SkipComments(stream, &pos);
fscanf_s(stream, "%d", &_n); // считываем размерность пространства решений
assert(_n <= _MAX_N);
|
|
|
assert(_n>0);
SkipComments(stream, &pos);
fscanf_s(stream, "%d", &_m);// считываем общее кол-во неравенств (включа€ -x_j<=0)
assert(_m <= _MAX_M);
assert(_m>0);
SkipComments(stream, &pos);
for (int i = 0; i<_m; i++) // —читываем матрицу ј (включа€ -x_j<=0)
for (int j = 0; j<_n; j++)
fscanf_s(stream, "%lf", &_A[i][j]);
SkipComments(stream, &pos);
for (int i = 0; i<_m; i++) // —читываем столбец b (включа€ -x_j<=0)
fscanf_s(stream, "%lf", &_b[i]);
SkipComments(stream, &pos);
for (int j = 0; j<_n; j++) // —читываем вектор целевой функции c
fscanf_s(stream, "%lf", &_c[j]);
SkipComments(stream, &pos);
for (int j = 0; j<_n; j++) // —читываем координаты центральной точки звездообразной области
fscanf_s(stream, "%lf", &_g[j]);
SkipComments(stream, &pos);
fscanf_s(stream, "%lf", &_R); // Cчитываем начальное значение радиуса сеточной области, обеспечивающее покрытие многогранника
SkipComments(stream, &pos);
fscanf_s(stream, "%d", &_K); // Cчитываем количество €чеек в сеточной области по одному измерению
assert(_K>0);
assert(_K % 2 == 1);
SkipComments(stream, &pos);
fscanf_s(stream, "%d", &_L); // Cчитываем число независимых фейеровских итераций в подпрограмме вычислени€ псевдопроекции
SkipComments(stream, &pos);
fscanf_s(stream, "%lf", &_T); // Cчитываем масштабирующий коэффициент дл€ вычислени€ координат целевой точки _z
fclose(stream);
};
static void SkipComments(FILE *stream, fpos_t *pos) {
/* ѕропускает пустые строки и комментарии (строки, начинающиес€ с '%') */
fscanf_s(stream, "\n");
fgetpos(stream, pos);
while (getc(stream) == '%') {
while (getc(stream)!= 10);
fscanf_s(stream, "\n");
fgetpos(stream, pos);
};
fsetpos(stream, pos);
};
static void Pi(int axis, int index) { // ¬ычисление точки _x псевдопроекции из _z на пересечение с €чейкой с индексом index на оси с номером axis
#define b_alpha(i) _b[i+_m] // вариативна€ часть расширенного столбца b'
Point x_stroke; // предыдуща€ точка в фейеровском процессе
double S[_MAX_N]; // сумма из формулы фейеровского отображени€
double _Scal_ai_x[_MAX_MC]; // ¬ектор A' Scal _x
double factor; // множитель в формуле фейеровского отображени€
double dist; // –ассто€ние между соседними итераци€ми
//#pragma omp parallel num_threads(4)
//#pragma omp parallel for simd
for (int j = 0; j < _n; j++)
_x[j] = _z[j];
Zero(axis, index);
for (int i = 0; i < _n; i++)
b_alpha(i) = -_y[i];
for (int i = 0; i < _n; i++)
b_alpha(i + _n) = _y[i] + _s;
CalcNormsq();
// ‘ейеровский процесс
do {
//#pragma simd
for (int l = 0; l < _L; l++) {
for (int j = 0; j < _n; j++) {
x_stroke[j] = _x[j];
S[j] = 0;
};
for (int i = 0; i<_mc; i++) {
_Scal_ai_x[i] = 0;
for (int j = 0; j<_n; j++) // ¬ычисление вектора A' Scal _x
_Scal_ai_x[i] += _A[i][j] * _x[j];
factor= __max(_Scal_ai_x[i] - _b[i], 0) / _normsq[i];
for (int j = 0; j < _n; j++)
S[j] += factor*_A[i][j];
};
for (int j = 0; j < _n; j++)
_x[j] = x_stroke[j] - (_lambda / _m)*S[j];
};
DataChange(); // ѕодпрограмма изменени€ исходных данных
dist = Dist(_x, x_stroke);
}while (dist>_EPS_F);
};
static void CalcNormsq() { // ¬ычисление столбца квадратов норм a_i
for (int i = 0; i<_mc; i++) {
double s = 0;
for (int j = 0; j<_n; j++)
|
|
|
s += _A[i][j] * _A[i][j];
_normsq[i] = s;
};
};
static void Zero(int axis, int index) { // ¬ычисление нулевой вершины y[*] €чейки с индексом index на оси с номером axis
assert(axis >= 0 && axis<_n);
assert(abs(index) < (_K - 1) / 2);
for (int j = 0; j < _n; j++)
_y[j] = _g[j];
_y[axis] = _g[axis] + index*_s;
};
static void DataChange() {};
static double Dist(Point x1, Point x2) { // –ассто€ние между точками
double x, dist;
dist = 0;
for (int j = 0; j<_n; j++) {
x = x1[j] - x2[j];
dist += x*x;
};
dist = sqrt(dist);
return dist;
};
[1]) — помощью символа  здесь обозначаетс€ целочисленное деление.
здесь обозначаетс€ целочисленное деление.

