




Компьютерное моделирование задач динамики железнодорожного подвижного состава
Часть 1
Основы моделирования в программном комплексе MEDYNA
Учебное пособие
 |
Санкт-Петербург
Учебное пособие предназначено для обучения студентов, инженеров и научных работников по курсу «Моделирование задач динамики железнодорожного подвижного состава», предусмотренного в плане магистерской подготовки по специальности «Вагоны».
В пособии изложены основные вопросы, касающиеся разработки математических моделей рельсовых экипажей при помощи программного комплекса MEDYNA. В первой части приводится краткое описание и примеры простейших моделей, поясняющие особенности трёх постановок задачи контакта «колесо – рельс», предусмотренных в MEDYNA.
Планируется издание второй и третьей частей пособия, в которых будут представлены динамические модели пассажирского и грузового вагонов, разработанные в MEDYNA.
Содержание
| Введение | |
| 1 Особенности моделей рельсовых экипажей в MEDYNA | |
| 2 Модели контакта колеса и рельса и особенности их применения для решения задач динамики рельсовых экипажей | |
| 2.1 Нелинейная подструктура «колесная пара – путь» | |
| 2.2 Нелинейный элемент связи «колесо – рельс» | |
| 2.3 Квазилинейный элемент связи «колесо – рельс» | |
| 3 Примеры создания модели одноосной тележки и решения некоторых задач динамики в MEDYNA | |
| 3.1 Модель с нелинейной подструктурой «колесная пара – путь» | |
| 3.2 Модель с нелинейным элементом «колесо – рельс» | |
| 3.3 Модель с квазилинейным элементом «колесо – рельс» | |
| Список литературы | |
Введение
Одним из разделов динамики механических систем является динамика железнодорожного подвижного состава. Методы моделирования и элементы моделей, применяемые для наземных экипажей различного назначения (автомобилей, ходовой части самолетов, гусеничных машин), в основном идентичны. Особенностью моделей рельсовых экипажей является описание контакта между колесом и рельсом.
Создателями программного средства для нужд учёных и инженеров, занимающихся исследованиями динамики рельсового подвижного состава, стали члены компании ArgeCare (Германия) совместно с Берлинским техническим университетом. Так появился программный комплекс MEDYNA, который в настоящее время считается эталоном для других пакетов благодаря разнообразию моделей описания контакта между колесом и рельсом и процедур численного анализа. Для описания контакта колесо – рельс MEDYNA предлагает выбор элементов — от кинематической связи до упругого многоточечного контакта, от описания пятна контакта эллипсом до формирования реальной поверхности взаимодействия, от линейной формулировки сил крипа до нелинейной. Важным свойством MEDYNA является динамическая организация массивов, а, следовательно, возможность создания моделей с практически неограниченным числом степеней свободы.
В программный комплекс одновременно с MEDYNA входят ещё две программы. Программа RSGEO служит для кинематического анализа движения колеса по рельсу с использованием аналитического описания профилей поверхностей контакта. Кроме кинематических соотношений вычисляются параметры пятен контакта. Вспомогательная программа RSPROF служит для аппроксимации профилей колеса и рельса, горизонтального профиля пути и неровностей сплайнами.
Сейчас MEDYNA приобретает современный вид Windows приложения. Чтобы сделать доступными пользователю преимущества интерактивного создания модели, разработан интерфейс MEDYNA со всемирно известным интерактивным пакетом ADAMS/Rail. Без интерактивного интерфейса ADAMS/Rail MEDYNA работает в режиме текстового диалога или в режиме пакетного задания. Текст диалога может быть русским или английским по желанию пользователя. Имеется обширное руководство на русском и английском языках.
За время существования программы накоплен большой опыт создания моделей, и MEDYNA завоевала известность во многих странах мира, производящих подвижной состав для железных дорог. В ПГУПС программа успешно используется для решения задач динамики экипажей Российских железных дорог.
1 Особенности моделей рельсовых экипажей в MEDYNA
Программная система формирует модель экипажа из твердых тел, кинематических связей, силовых элементов связи, внешних сил и моментов, законов управления и возмущений.
Система многих тел описывается в абсолютных перемещениях в одной или нескольких отсчетных системах координат, которые движутся вместе с экипажем по заданной траектории, описанной в инерциальной системе отсчета. Кинематика системы тел линеаризуется относительно отсчетной системы координат. При этом выражения характеристик кинематических и силовых связей между телами системы могут быть нелинейными. Такой подход значительно сокращает ресурсы, затрачиваемые программой на интегрирование, и не снижает точности расчетов.
Траектория движения отсчетной системы координат в MEDYNA задает продольный профиль пути, по которому движется рельсовый экипаж. Профиль пути можно выбрать среди нескольких встроенных в программу моделей или задать свой с помощью сплайна. Среди существующих моделей пути имеются прямые участки, переходные кривые и кривые постоянной кривизны. Для аппроксимации кривизны пути и возвышения наружного рельса сплайном по заданным экспериментальным точкам предназначен препроцессор RSPROF.
Если в модели необходимо использовать нелинейную кинематику (например, для моделирования движения в узких кривых), то можно ввести несколько отчетных систем координат. В таком случае взаимные перемещения между телами системы, описанными в различных отчетных системах координат, будут рассматриваться как большие.
В рамках подхода, принятого в MEDYNA, модели экипажей могут содержать следующие тела (инерционные элементы):
- абсолютно твердое тело с шестью степенями свободы;
- твердое тело с упругими свойствами. Упругость рассматривается как дополнительная обобщенная координата тела и задается формой колебаний с соответствующей ей жесткостью и массой;
- гироскопы для описания динамики с учетом дополнительной инерции вращающихся тел (например, колесных пар).
Несколько тел могут быть объединены в подструктуру. В программе разработана подструктура для описания движения колесной пары по рельсовому пути.
Тела соединяются друг с другом в так называемых «узлах» при помощи элементов связи (жесткие, упругие или диссипативные элементы):
- кинематических или силовых;
- пассивных или активных;
- со статической или динамической характеристикой;
- линейных или нелинейных.
Кинематический элемент связи — это либо жесткий стержень со сферическими шарнирами на концах, либо кинематическая связь общего вида, в которой приравнены отдельные перемещения тел в узле (например, сферический или цилиндрический шарнир, плоскость скольжения). Введение кинематических связей уменьшает число обобщенных степеней свободы системы.
Силовые элементы связи это:
- пружины или демпферы направленного действия;
- пружины или демпферы трехмерного действия;
- последовательное соединение пружины и демпфера.
К специальным элементам для описания характерных для железнодорожного состава связей относятся:
- пневматические рессоры с резервуаром, клапаном и насосом;
- элементы связи между колесом и рельсом с линейной и нелинейной кинематикой;
- пользовательские подпрограммы, в которых могут быть заданы любые зависимости сил от относительных координат.
Особенности каждого из элементов связи между колесом и рельсом и задачи динамики рельсовых экипажей, которые их применение позволяет решить, будут подробно рассмотрены в следующей главе.
Внешние воздействия на экипаж объединены в программе под общим термином «возмущения». Это могут быть:
- внешние силы и моменты, приложенные в узлах тел;
- заданные перемещения в элементах связи;
- заданные перемещения в точках положения наблюдателей.
Наблюдатели используются в программе для имитации датчиков, расположенных на вагоне, и позволяют наблюдать изменение во времени или в частотной области отдельных, интересующих пользователя, величин. В качестве таких величин могут служить ускорения узлов экипажа в выделенных направлениях, деформации элементов связи и усилия в связях, относительные перемещения тел.
В MEDYNA пользователю предлагаются следующие методы анализа динамических систем:
- вычисление собственных чисел и векторов линеаризованной системы с учетом номинальных усилий в элементах связи;
- вычисление амплитудно-частотных и фазо-частотных характеристик для заданных входов и выходов линеаризованной системы в определенном диапазоне частот;
- вычисление стационарной матрицы ковариаций для линеаризованной системы;
- вычисление спектральных плотностей мощности переменных линеаризованной системы по заданным спектральным плотностям мощности входных возмущений;
- вычисление предельных циклов, возникающих при движении нелинейной системы без возмущений, методом гармонической линеаризации;
- численное интегрирование во временной области линейных или нелинейных уравнений движения;
- вычисление усилий и моментов в связях в заданной конфигурации системы;
- вычисление статического или квазистатического положения равновесия системы.
Для численного интегрирования предусмотрены разнообразные алгоритмы от схемы Рунге-Кутты с постоянным или переменным шагом по времени до специальных схем интегрирования жестких систем.
2 Модели контакта колеса и рельса и особенности их применения для решения задач динамики рельсовых экипажей
2.1 Нелинейная подструктура «колесная пара – путь»
Для моделирования динамики рельсовых экипажей в программном комплексе MEDYNA предусмотрена так называемая подструктура «колесная пара – путь», которая описывает движение колесной пары по рельсовому пути постоянной ширины колеи (рис. 1).
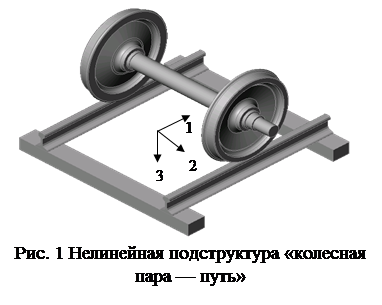 В подструктуру входит два твердых тела: колесная пара и участок пути (который считается движущимся вместе с рельсовым экипажем). В программе фиксированы степени свободы этих тел, но в зависимости от задачи пользователь имеет возможность выбрать:
В подструктуру входит два твердых тела: колесная пара и участок пути (который считается движущимся вместе с рельсовым экипажем). В программе фиксированы степени свободы этих тел, но в зависимости от задачи пользователь имеет возможность выбрать:
- жесткую колесную пару или колесную пару с податливостью оси на кручение;
- неподвижный участок пути или участок пути на упруго-демпфирующем основании.
В подструктуре используется нелинейное описание контакта между колесом и рельсом. Нелинейность геометрии профилей описывается таблично. При этом геометрические параметры взаимодействия (положение точки контакта, кривизна поверхностей в точке контакта и т.п.) вычисляются как функции поперечного смещения и угла виляния колесной пары в рельсовой колее. В случае двухточечного контакта эти функции имеют разрыв. Для вычисления нелинейных зависимостей сил крипа от относительных проскальзываний в точках контакта существует несколько алгоритмов:
- Калкера с итерационным вычислением нормальных усилий;
- Вермюлена-Джонсона с аппроксимацией нормальных усилий и учетом крипа спина.
О поведении экипажа, в модели которого использованы подструктуры «колесная пара – путь», можно судить по результатам численного интегрирования уравнений движения. При этом могут быть решены следующие задачи динамики рельсовых экипажей:
- оценка критической скорости;
- оценка качества стационарного движения в прямой;
- оценка качества стационарного движения в кривых произвольного очертания;
- исследование режимов разгона и торможения.
Остановимся подробнее на некоторых задачах.
Оценка критической скорости рельсового экипажа
Для всех железнодорожных экипажей наблюдается явление нарастания колебаний виляния колесных пар и тележек с увеличением скорости движения. При достижении экипажем некоторого характерного значения скорости амплитуды колебаний колесных пар достигают уровня, при котором происходят регулярные удары гребней колес о рельсы, что повышает вероятность схода колесной пары с рельсов.
Для оценки этой характерной скорости (критической скорости) необходимо проводить исследование движения экипажа по прямому пути без неровностей, задавая при этом начальное возмущение на колесных парах. Обычно в качестве начального возмущения используется небольшое (2–3 мм) поперечное смещение колесной пары, которое задается в качестве начальных условий уравнений движения. Используемая модель пространственных колебаний экипажа должна учитывать все нелинейности характеристик элементов связи.
Если результаты численного интегрирования показывают, что при движении с заданной скоростью начальные возмущения движения колесных пар затухают до нуля, то развитие интенсивных колебаний с ударами о гребень при этой скорости невозможно, движение экипажа устойчиво. Если начальные возмущения переходят в колебания постоянной амплитуды (рождается так называемый предельный цикл), и при этом не происходит ударов о гребень, то соответствующая скорость движения может быть выше критической. Для принятия решения в этом случае необходимо рассматривать движение по пути с неровностями. Если же начальные возмущения приводят к раскачке колебаний колесных пар, то движение с соответствующей скоростью неустойчиво.

