




Преобразуем уравнение движения М – Мс = Jdω/dt: (5.12)
 (5.13)
(5.13)
Правая часть уравнения представляет собою скорость wс, соответствующую моменту сопротивления МС, однако, в рассматриваемом случае w0, а значит и wс не постоянные величины, а известные функции времени w0(t) и wc(t). Т.о., уравнение (5.13) имеет вид:
 . (5.14)
. (5.14)
Решение этого дифференциального уравнения определит искомую зависимость w(t).
Для получения зависимости М(t) удобно воспользоваться непосредственно уравнением движения (5.12), подставив в него производную найденной функции w(t):
 (5.15)
(5.15)
Правая часть уравнения (5.14), вообще говоря, может иметь любой вид. Закон w0(t) в случае безынерционного преобразователя формируется на его входе; при инерционном преобразователе закон w0(t) связан со свойствами преобразователя. В ряде случаев закон w0(t) формируется т.о., чтобы получить требуемый закон w(t).
3. Э-омагнитная постоянная времени, исследование ПП-сов с ее учетом.
(общий курс э-опривода Ильинский). ПП в э-оприводе с ДПТ незав. возбуждения при Lя¹ 0.
Длительность (Чекунов 90) протекания ПП-сов определяется соответствующими постоянными времени. Э-омагнитные ПП-сы обусловлены изменением запаса э-омагнитной энергии в электрических машинах, пропорциональных индуктивности их цепей и квадрату протекающего по ним тока. Длительность определяется индуктивностью обмоток.
Э-омагнитная инерция хар-ется э -омагнитной постоянной времени Тэ, (или Тв), равной отношению индуктивностей L электрич. цепей привода к их активному сопротивлению:Тэ= L/R. Физический смысл э-омагнитной постоянной времени: это время, в течение которого ток в контуре, содержащем индуктивность, изменяется от нуля до установившегося значения, определяющегося величиной приложенного напряжения и омического сопротивления контура.
Пример. Если к зажимам обмотки, обладающей индуктивностью LВ и омическим сопротивлением RВ, приложить постоянное напряжение UВ, то уравнение ЭДС для цепи, например, обмотки возбуждения ДПТ выразится следующим образом:

Разделив правую и левую части на RВ, получим диф. уравнение первого порядка
где: ТВ = Lв/Rв; (Тв р + 1 = 0).
Решение уравнения для общего случая, когда при t = 0 начальное значение тока i = Iнач:
iв = iв.уст(1 – е-t/Тв) + iв.нач е-t/Тв
Т.о. закон изменения тока носит экспоненциальный хар-р. Продолжительность ПП-са приблизительно (3 ÷ 4)TВ. Полученные уравнения не учитывают насыщение магнитной системы, т.е. считают L = const.

Рис.
Ориентировочно TВ – двигателя независимого возбуждения
 , с.
, с.
При Р = (1 ÷ 100) кВт → TВ = (0,1 ÷ 1) с
Р = (100 ÷ 1000) кВт → TВ = (1 ÷ 2) с
Р = (1000 ÷ 3000) кВт → TВ = (2 ÷ 4) с
Поэтому продолжительность нарастания тока может быть значительной (3÷4)TВ, что приводит к уменьшению быстродействия. Для сокращения времени ПП-са применяют форсировку возбуждения – различные способы ускорения нарастания тока возбуждения.
Рассмотрим схему на рис.5.19 пуска ДПТ с индуктивностью Lя.

Рис. 5.19 – Схема пуска э-опривода = I тока с двигателем независимого возбуждения
Для якорной цепи справедливо уравнение:
 , (5.23)
, (5.23)
решив которое относительно w:
 (*)
(*)
и обозначив  получим
получим  . (**)
. (**)
U¢ зависит от di/dt т.е. уравнение (**) представляет семейство прямых (рис.5.20,а), параллельных естественной хар-ке и располагающихся как ниже (di/dt > 0), так и выше
(di/dt < 0) нее. При di/dt = 0, очевидно, уравнение (**) соответствует естественной хар-ке.
После замыкания ключа К ток i начинает расти, значит растет М и привод разгоняется (для упрощения рассуждений примем Мс = 0), переходя при этом с хар-ки на на хар-ку
(di/dt > 0, но уменьшается по мере разгона). В процессе увеличения тока и скорости (участок 0а на рис.5.20) возрастает запас энергии как в индуктивности, так и во вращающемся якоре. В точке а рост тока прекращается; при этом в соответствии с (*) привод оказывается на естественной хар-ке, но М > Мс = 0. С точки а начинается спадание тока, т.е. энергия, запасенная в Lя, передается вращающемуся якорю. Механизм передачи очевиден из (*): напряжение, приложенное к якорю U¢, становится больше, чем напряжение сети U. На участке аb привод разгоняется, соответственно растет е = сw, причем в точке b i = 0 – запас энергии в Lя исчерпан, однако w >w0 и e > U, т.е. в якоре запасена избыточная мех-кая энергия.
На участке bc под действием e > U ток изменяет направление, привод тормозится, при этом избыточная мех-кая энергия вновь переходит в э-омагнитную энергию, накапливаемую в индуктивности. В точке с di/dt = 0, однако в Lя запасена энергия, чему соответствует i ¹ 0 и
M ¹ 0. Привод продолжает тормозиться до точки d, затем процесс повторяется.
Кривая 0abcd... w0 в плоскости w – M представляет собою динамическую мех-кую хар-ку. Соответствующие зависимости w(t), i(t) или M(t) показаны на рис. 5.20,б.
Колебательность процесса связана с тем, что происходит периодическое преобразование кинетической энергии в э-омагнитную и обратно. Т.к. в якорной цепи есть сопротивление Rя процесс перекачивания энергии сопровождается ее рассеиванием, вследствие чего система после ряда колебаний приходит в точку w0, соответствующую установившемуся режиму.


а) б)
Рис. 5.20 – Мех-кие хар-ки (а) и ПП пуска при Lя ¹ 0 (б)
Если бы сопротивление Rя было равным нулю, колебания w и М имели бы незатухающий хар-р. Если, наоборот, Rя велико, энергии, запасенной в Lя на участке 0а, может оказаться недостаточно для покрытия потерь в Rя и вывода якоря в точку w > w0 при i = 0. В этом случае процесс будет иметь апериодический хар-р. Для определения возможности колебательного процесса составляется хар-ристическое уравнение
1 + Тмр + ТмТяр2 = 0 (из ур-я ω + ТМdω/dt +ТМТЯ d2ω/dt2 = ω0) (D)
Определяются его корни p1, p2
 →
→ 
откуда вытекает условие колебательности процесса. Если
4ТЯ/Тм > 1, т.е. Тм < 4Тя,
корни комплексные и процесс носит колебательный характер; если
4ТЯ/Тм ≤ 1, т.е. Тм ³ 4Тя,
корни действительные и процесс апериодический.

Рис.8.6 – Переходные хар-ки э-опривода с линейной мех-кой хар-кой при пуске
(elektroprivod Онищенко – 197стр)
Проведем (elektroprivod Онищенко – 191стр) анализ электромеханической системы, состоящей из двигателя с линейной механической характеристикой, и жесткoгo механического звена. Движение такой электромеханической системы определяется уравнением движения электропривода
 (5.7)
(5.7)
Sssssssssssssssssssssssssssssssssssssssssssssssssssssssssssssssssssssssssssssssssssss
б) Мс = const, M линейно зависит от w, b < 0.
Пусть (общий курс эопривода Ильинский – 82стр) хар-ки двигателя и механизма имеют вид, представленный на рис.5.4 (увеличение скорости). Уравнение линейной мех-кой хар-ки двигателя с отрицательной жесткостью может быть записано как
 (выразили из: М = β(ω0 – ω) (5.4)
(выразили из: М = β(ω0 – ω) (5.4)
или
 (5.5)
(5.5)
где β = dM/dω – жесткость мех-кой хар-ки; для линейной хар-ки β = ΔM/Δω.
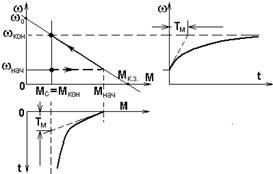
Рис. 5.4 – Мех-кие хар-ки и графики ПП-сов w(t) и M(t) при линейной зависимости w(М)
Подставив (5.5) в (5.1), после простых преобразований получим:

Выражение в правой части, как следует из (5.4), представляет собою w кон. Обозначив коэффициент перед производной через Т м, запишем:
 (5.6)
(5.6)
Теперь подставим в (5.1) вместо d w/dt ее выражение, полученное из (5.4):
или, используя принятые выше обозначения,


