




1. Мех-кие хар-ки привода w(М) известны, линейны (по крайней мере, на рабочих участках) и параллельны друг другу, то есть выражаются уравнением (5.4):
ω = ω0 – М/|β|,
где β = dM/dω = ΔM/Δω – жесткость хар-к.
2. Известны или могут быть определены зависимости еп(t) или f1(t), т.е. закон изменения во времени фактора, вызывающего ПП. Т. к. еп или f1 однозначно связаны со скоростью идеального холостого хода привода w0
w0 = еп/с – для схемы на рис. 5.11а,
w0 = 2πf1/p – для схемы на рис. 5.11 в,
то известен закон изменения во времени w0.
3. Известно начальное (wнач, Мнач) и конечное (wкон, Мкон) состояние привода, момент инерции J и момент сопротивления Мс = const.
4. Преобразователь П обладает двусторонней проводимостью, т. е. хар-ки w(М) могут располагаться во всех квадрантах плоскости w, М.
При частотном изменении f1 и U1 переход привода с одной хар-ки на другую происходит постепенно, одновременно с изменением скорости, в результате чего соответствие между скоростью w и моментом М в каждый момент времени определяется не статической мех-кой хар-кой, а другой, отличной от нее хар-кой, которую называют динамической мех-кой хар-кой или просто динамической хар-кой.
В качестве примера на рис.5.13 показана статическая хар-ка АД при номинальной частоте 1, по которой будет происходить пуск при мгновенном приложении к двигателю напряжения такой частоты, и динамическая хар-ка 2, соответствующая пуску двигателя путем плавного изменения частоты от нуля до номинальной по некоторому закону.
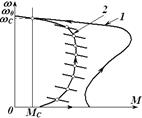
Рис. 5.13 – Статическая 1 и динамическая 2 мех-кие хар-ки
Динамические свойства э-опривода переменного тока с линейной мех-кой хар-кой…
ПП-сы в системе (moskalenko_v_v_elektricheskiy_privod PDF 2000 - 143стр) «преобразователь частоты - АД» (ПЧ-АД), схема которой приведена на рис. 5.41, иогут быть сформированы близкими по своему хар-ру к ПП-сам в системе УВ - ДПТНВ. Для этого используется задатчик интенсивности 1, который при поступлении сигнала задания UЗС формирует
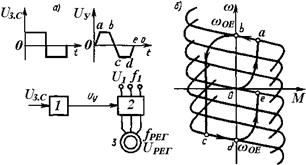
Рис.5.41
нужный закон изменения сигнала управления Uy(t) на входе ПЧ 2 и позволяет за счет этого получить требуемые графики изменения скорости и момента АД 3 в ПП-се. Необходимо отметить, что реализуемое при этом плавное изменение частоты и подаваемого на АД напряжения обуславливает частичное или полное устранение влияния э-омагнитных ПП-сов.
Для примера на рис. 5.41, б показана траектория мех-ких хар-к пуска, реверса и торможения вхолостую АД при линейном законе изменения частоты, а следовательно, скорости магнитного поля двигателя ω 0(t). Пуску АД соответствует участок 0ab, реверсу - участок bcd и торможению - участок de0 этой траектории. Отметим, что при торможении АД (за исключением участка 0е) происходит рекуперация энергии в сеть, что эконом-ки целесообразно.
Формирование ПП-сов в системе «регулятор напряжения - АД». Для ПП-сов в асинхронном ЭП в общем случае хар-рны значительные по амплитуде пики э-омагнитного момента, что обуславливает дополнительные динамические усилия в его мех-кой части и может даже вызвать поломку ее элементов. В тех случаях, когда нежелательно или недопустимо воздействие переходного э-омагнитного момента на кинематическую схему ЭП, часто прибегают к формированию момента АД с помощью тиристорных регуляторов напряжения (ТРН). За счет плавного увеличения подводимого к АД напряжения при определенной последовательности подключения его фазных обмоток к сети обеспечивается эффект снижения пиков э-омагнитного момента АД. На рис.5.42, а показано изменение момента 1 и скорости 2 АД в процессе пуска при скачкообразном, а на рис.5.42, б при экспоненциальном хар-ре изменения прикладываемого к АД напряжения. Если в первом случае максимум момента

рис. 5.42
примерно в два раза превосходит критический момент АД, то во втором случае при нарастании напряжения по экспоненте с постоянной времени около 0,025 с колебательный характер э-омагнитного момента практически не проявляется. Скорость изменения прикладываемого к АД напряжения может изменяться также и по любому другому закону, например линейному.
Использование ТРН позволяет решить и еще одну важную практическую задачу - обеспечить регулирование (ограничение) пусковых токов АД, необходимость в чем возникает при пуске двигателей большой (несколько сотен или тысяч кВт) мощности. При прямом(без токоограничения) пуске мощных двигателей возникающие при этом значительные пусковые токи приводят к снижению напряжения в питающей сети, что отрицательно влияет на работу других э-оприемников и приводит к значительным э-омагнитным, мех-ким и тепловым перегрузкам элементов самого ЭП. Плавное изменение прикладываемого кАД при его пуске напряжения позволяет существенно снизить эти отрицательные явления. ТРН, которые предназначены для формирования желаемых графиков момента и тока АД в ПП-сах, получили название пускателей, или «мягких» стартеров.
Динамические хар-ки определяются темпом изменения фактора, вызывающего ПП, и пар-ми привода, могут очень сильно отличаться от статических хар-к и даже иметь совсем другую форму.
Уравнения, описывающие ПП-сы (Ильинский общий курс э-опривода)

