




Лекция 30
1. Динамические свойства э-опривода постоянного и переменного тока с линейной мех-кой хар-кой при различных способах управления. 2. Э-омех-кая постоянная времени и ее физический смысл. 3. Э-омагнитная постоянная времени, исследование ПП-сов с ее учетом.
Объектом исследования будет упрощенная, идеализированная модель привода – рис. 5.1.

Рис. 5.1– Модель э-опривода для исследования динамики
Целью изучения ПП-сов будет определение зависимостей w(t), М(t) и иногда i(t) при известных условиях ПП-са и пар-рах привода.
1. Различные способы управления – это значит ЭД можно сразу на полное напряжение питания подключать, либо ступенчато изменять, либо плавно. Частоту вращения АД можно регулировать путем изменения U1 и f1.
Динамические свойства э-опривода – это пуск, реверс, торможение, переход с одной скорости на другую (с одной хар-ки на другую), увеличение или уменьшение нагрузки на валу. ПП-сы могут производиться вхолостую и под нагрузкой. Все (общий курс эопривода Ильинский – 78стр) ПП-сы подчиняются мех-кому уравнению движения
М – МС = J∑dω/dt (5.1)
Искомые зависимости w(t) и M(t) должны быть получены путем решения этого уравнения при заданных начальных условиях. Особенности привода отразятся в виде зависимостей M(w) и Mс(w), входящих в уравнение (5.1).
ПП-сы при L = 0 (L – электрические (э-омагнитные) инерционности малы или не
проявляются, т.е. преобладающей инерционностью в приводе является мех-кая
инерционность (J);) и “ быстрых ” изменениях воздействующего фактора.
а) Рассмотрим случая, когда в ПП-се M = const, Mс = const (т.е. ПП вызван изменением U1).
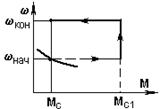

Рис. 5.2 – Мех-кие хар-ки (а) и временные зависимости (б) при М = const и Mc = const
Пусть привод (рис.5.1) работал в точке w нач, М нач = М с (рис.5.2) некоторой хар-ки (она нас не интересует) и в момент времени t = 0 был мгновенно переведен на новую хар-ку, показанную на рис. 5.2,а жирной линией.
Уравнение (5.1) в этом случае – дифференциальное уравнение с разделяющимися переменными и его решение имеет вид:
 (М1 – это МЭД)
(М1 – это МЭД)
Постоянную интегрирования С найдем из начального условия – при t = 0, w = w нач: w нач = С.
Окончательно будем иметь:
 (5.2)
(5.2)
Это решение действует на интервале w нач < w < w кон, т. к. по условию при w = w кон функция w(М) терпит излом. На этом интервале М = М1.
Графики ПП-са приведены на рис.5.2,б. Время ПП-са t пп можно найти, подставив в (5.2) w = w кон и решив относительно t:
 (5.3)
(5.3)
Этот же результат можно получить, решив (5.1) относительно dt и взяв определенный интеграл:

Рассмотренный простейший случай имеет большое практическое значение, т. к. к нему может быть сведено в целях оценки времени и хар-ра ПП-са большое число конкретных задач.
Оценим время пуска tп короткозамкнутого АД с известными мех-кой хар-кой, Мс и J (рис.5.3,а). Заменим реальную хар-ку (сплошная линия) приближенной (пунктирная линия) и применив (5.3), получим:


Рис. 5.3 – Мех-кие хар-ки (а) и графики ПП-сов w(t) и M(t) при пуске АД
Зная tп, можно построить приближенные графики ПП-са (пунктир на рис.5.3,б). Эти графики будут отличаться от действительных (сплошные линии на рис. 5.3,б), однако во многих случаях полученная оценка может быть весьма полезной.
(Н.Ф. ИЛЬИНСКИЙ ОСНОВЫ Э-ОПРИВОДА lek 5; общий курс эопривода Ильинский – 78стр; Elektroprivod – 195стр.). При мгновенном изменении f1 и U1 мгновенно устанавливается новая мех-кая хар-ка, а изменение скорости w и момента М в ПП-се происходит согласно этой хар-ке. ПП определяется статической мех-кой хар-кой привода.
б) Мс = const, M линейно зависит от w, b < 0.
Проведем анализ (elektroprivod Онищенко -191стр) э-омех-кой системы, состоящей из двигателя с линейной мех-кой хар-кой и жесткoгo мех-кого звена. Движение такой э-омех-кой системы определяется уравнением движения э-опривода
М – Мс = J∑dω/dt (1)
Линейная мех-кая хар-ка описывается ypaвнением
М = β(ω0 – ω). (2)
Совместное решение (1) и (2) позволяет получить ypaвнение, описывающее ПП-сы двигателя, определяемые мех-кой инерционностью э-опривода
β(ω0 – ω) – Мс = J∑dω/dt →  . (3)
. (3)
2. Из других источников (Н.Ф. ИЛЬИНСКИЙ ОСНОВЫ Э-ОПРИВОДА lek 5) берут модуль величины, стоящей в знаменателе  . Величину, стоящую перед производной,
. Величину, стоящую перед производной,
 , или так TM = J∑/β
, или так TM = J∑/β
называют э-омех-кой постоянной времени.
Для выяснения смысла этой величины рассмотрим условный привод с хар-кой (рис.5.5).
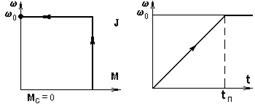
Рис. 5.5 – К определению э-омех-кой постоянной времени Тм
Определив время разгона такого привода по (5.3)

замечаем, что оно выражается так же, как Т м. Тм – время, за которое привод разогнался бы вхолостую до w = w0 под действием момента короткого замыкания.
Мех-кая инерция хар-ризуется э-омех-кой постоянной времени Т м. Для ДПТ она представляет собой время, в течение которого привод с моментом инерции J разгоняется вхолостую из неподвижного состояния до скорости идеального ХХ при неизменном моменте, равном моменту короткого замыкания.
Величина Мс/β представляет собой падение скорости от нагрузки – статическую ошибку Δωс, а величина (ω0 – Мс/β) – установившееся значение скорости ωуст после окончания ПП-са, когда М станет равным Мс (рис.8.3,а).

Рис.8.3 – ПП пуска э-опривода:1–механич. и 2 –переходная хар-ка
Используя ТМ получим выражение для переходной хар-ки э-опривода (Moskolenko_Elektricheskiy_privod – 110 стр):
 .
.
В рассматриваемом ПП-се как для скорости, так и для момента справедливо одинаковое уравнение вида
 , (5.8)
, (5.8)
Видно, что в рассматриваемом ПП-се как для скорости, так и для момента справедливо одинаковое уравнение. Решение (5.8) имеет вид
 , (5.10)
, (5.10)
то есть скорость и момент изменяются в ПП-се от начальных до конечных значений по экспоненциальному закону с постоянной времени Тм (рис. 8.3).
Напомним некоторые важные свойства экспоненты.
1. Касательная в любой точке отсекает на линии установившегося состояния отрезок, равный Тм.
2. За время t = Тм изменение величины составляет 0,632 от полного изменения.
3. За время t = 3 Тм изменение составляет 0,95 от полного. В дальнейшем мы будем считать, что процесс устанавливается за t = 3 Тм.
Уравнение (5.10) позволяет решать любые задачи, относящиеся к рассматриваемому типу.
ПП-сы, определяемые одной мех-кой инерционностью, суммарным приведенным к валу ЭД моментом инерции J∑ описываются ДУ первого порядка (5.8). Решением этого уравнения является переходная хар-ка, имеющая вид экспоненты с постоянной времени Т М (рис.8.3,б):

при ωнач= 0: (индексы уст ≡ кон)

Ток, момент и скорость двигателя с линейной мех-кой хар-кой в переходных режимах изменяются по экспоненциальному закону.
Рассчитаем ПП мгновенного наброса нагрузки от Мс1 до Мс2 на АД с КЗ котором с мех-кой хар-кой, линейной на рабочем участке (рис. 5.6).
Вычислим Тм:
Определим начальные и конечные значения w и М:
wнач = w1, wкон = w2;
Мнач = Мс1, Мкон = Мс2

Рис.5.6 – ПП наброса нагрузки
Запишем по (5.10) уравнения ПП-са
ω = (ω1 – ω2)e-t/Tм + ω2 ;
M = (Mc1 – Mc2)e-t/Tм + Mc2 ;
и построим графики (рис.5.6).
ПП-сы при L = 0 (L – электрические (электромагнитные) инерционности и “ медленных ”
изменениях воздействующего фактора
К задачам данной группы относят ПП-сы в системе преобразователь – двигатель (П-Д). Фактор, вызывающий ПП, изменяется не мгновенно (темп его изменения соизмерим с темпом изменения скорости привода в ПП-се); учитывается только мех-кая инерция в приводе (J), индуктивности в цепях двигателя малы или не проявляются. Типичные структуры системы П-Д и соответствующие мех-кие хар-ки показаны на рис. 5.11”а” и “в”.



а) б) в) г)
Рис. 5.11 – а и б) Система ПН-ДПТ и ее мех-кие хар-ки;
в и г) Система ПЧ-АД и ее мех-кие хар-ки
Роль преобразователя П в схеме на рис.5.11 а может играть генератор (система Г-Д) или тиристорный преобразователь (ТП-Д). Фактор, вызывающий ПП в этих системах, – изменение входного сигнала uвх, приводящее к изменению ЭДС преобразователя еп.
Роль преобразователя П в схеме на рис.5.11 в играет статический преобразователь частоты. Фактор, вызывающий ПП в этих системах, – изменение входного сигнала uвх, приводящее к изменению частоты и напряжения на выходе преобразователя.

