




Указатели и датчики угловых скоростей. Если с осью рамки скоростного гироскопа сочленить стрелку, то можно получить прибор, указывающий угловую скорость разворота. Такие приборы называются указателями поворота.
Вместо стрелки на оси рамки можно закрепить щётку потенциометра. В этом случае скоростные гироскопы используются как датчики угловых скоростей в различных автоматических системах управления (автопилотах, прицелах и т. д.).
Наличие указанной выше методической погрешности является причиной того, что указатели поворота часто не имеют градуированной шкалы, а служат только индикаторами наличия и знака угловой скорости разворота.
При правильном вираже выполняется равенство

где W —скорость полета;
g — ускорение силы тяжести;
w с - угловая скорость.
Из этой формулы следует, что при W = const угол γ крена и угловая скорость w с виража имеют однозначную связь. Поэтому для определённой скорости W шкала указателя может градуироваться в значениях углов крена.
Скоростные гироскопы, применяемые в указателях поворота, довольно чувствительны к угловой скорости разворота летательного аппарата относительно оси у. Минимальные угловые скорости, отмечаемые прибором, не превышают 0,1—0,4 град/сек.
Демпфирование колебаний стрелки указателя поворота осуществляется с помощью пневматического демпфера Д.
Центральные гировертикали (ЦГВ) — являются на ряде летательных аппаратов едиными гироскопическими датчиками, обеспечивающими сигналами углов крена и тангажа все потребители этих величин (радиолокационные станции, автопилоты и др.).
На измерительных осях ЦГВ устанавливается по несколько потенциометров (или сельсинов), с которых снимаются сигналы пропорциональные величинам измеряемых углов. При этом оси рам ЦГВ оказываются сильно нагруженными моментами сил трения в потенциометрах и электромагнитными моментами в сельсинах, что значительно ухудшает точность выдаваемых сигналов.
Для повышения точности в ЦГВ применяется силовая гироскопическая стабилизация, которая обеспечивает компенсацию всех моментов, приложенных к гировертикали.
На рис. 5 изображена электрокинематическая схема ЦГВ. В подшипниках корпуса 2 прибора закрепляется внешняя рама 5 карданного подвеса. Внутренней рамой служит цилиндрическая платформа 7. Ось y платформы 7 стабилизируется по вертикали. Ось x направлена параллельно продольной оси летательного аппарата, а ось z — параллельно его поперечной оси. В результате этого с потенциометра 9 снимаются сигналы углов крена, а с потенциометра 12 — углов тангажа.
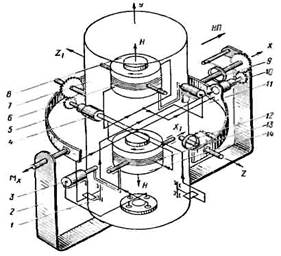
Рис. 5. Схема ЦГВ: 1 — ось внутренней рамы; 2—корпус прибора; 3, H — коррекционные электродвигатели; 4, 10 — электродвигатели; 5 — внешняя рама; 6, 9, 12, 13 — потенциометры, 7 — платформа; 8, 14 — гироскопы
Внутри платформы 7 размещены два гироскопа 8 и 14 с двумя степенями свободы (их кинематические моменты Н равны по абсолютной величине и противоположно направлены). Ось Zi кожуха гироскопа 8 параллельна оси Z, а ось X1 кожуха гироскопа 14 параллельна оси Х гировертикали.
Стабилизацию ЦГВ обеспечивают следующие элементы — потенциометры 6, намотанный на кожухе гироскопа 8 и закрепленный на внешней раме электродвигатель 10; потенциометр 13; намотанный на кожухе гироскопа 14 и закрепленный на платформе 7; электродвигатель 4. Через редукторы электродвигатель 10 связан с корпусом 2, а электродвигатель 4 — с внешней рамой 5 ЦГВ.
При действии внешнего момента МX, например, на ось x рамы 5, будет прецессировать ось гироскопа 8 так, что вектор H кинетического момента будет двигаться в сторону совмещения с вектором МX. Вследствие этого смещается относительно своих щеток потенциометр 6 и на них появляется напряжение (величина и фаза этого напряжения определяются направлением и величиной отклонения гироскопа 8), которое подается к электродвигателю 10. Последний развивает вращающий момент противоположного направления внешнему моменту МХ. При равенстве этих моментов прецессия оси гироскопа 8 прекращается. При этом ось гироскопа 8 отклонится на какой-то угол от вертикали у, но ось у платформы (вместе с потенциометром 12) останется неподвижной. После снятия внешнего момента МХ под действием момента электродвигателя 10 гироскоп 8 прецессирует к вертикали у, пока напряжение на щетках потенциометра 6 не станет равным нулю.
Если внешний момент приложен к оси z, то будет прецессировать гироскоп 14. При этом напряжение с щеток потенциометра 13 поступает к электродвигателю 4. Происходит компенсация внешнего момента.
Следует отметить, что наличие силовой компенсации внешних моментов не устраняет кажущегося ухода гировертикали ввиду вращения Земли. Для этих целей применяют систему коррекции, состоящую из жидкостного маятника 17 и коррекционных электродвигателей 3 и 11.
Вывод: использование двухстепенных гироскопов в частности ЦГВ позволило повысить надёжность и в то же время уменьшить вес бортового оборудования путём считывания информации по угловым положениям и угловым скоростям для различных потребителей и систем.
Заключение
Первым серьёзным использованием замечательных свойств гироскопа был опыт, поставленный физиком Л. Фуко в 1852 г. Он продемонстрировал построенный им прибор, основной частью которого был быстро вращающийся ротор (маховик). Данная идея получила колоссальное развитие и реализуется человечеством в различных приборах в авиации, космонавтике, судоходстве и т.д. и т.п.
Прогресс не стоит на месте и на сегодняшний день современные гироскопические системы создаются без карданных механизмов что позволило повысить точность считывания информации и дальнейшее использование.
Задание на самостоятельную подготовку
1. Как располагают гироузел на самолёте.
2. Для чего предназначена следящая рама на гироузле.
3. Что такое маятниковая коррекция.
4. Назначение и принцип действия АГД-1.
5. Назначение и принцип действия АГБ-3.
6. Принципы построения двухстепенного гироскопа.
7. Принцип действия двухстепенного гироскопа.
8. Область применения двухстепенного гироскопа.
Литература
1. А. Г. Гамулин, Е.В. Софронов «Специальное оборудование самолётов и вертолётов гражданской авиации» Москва «ТРАНСПОРТ» 1972г., стр.177-200.
Начальник цикла – старший преподаватель УВЦ при ГУАП
подполковник А. Бакланов

