




Содержание группового занятия
Введение
Во многих гироскопических приборах используется упрощенный, двухстепенный вариант гироскопа, в котором наружная рамка трехстепенного гироскопа устранена, а полуоси внутренней закрепляются непосредственно в стенках корпуса, жестко связанного с движущимся объектом. Если в таком устройстве единственная рамка ничем не ограничена, то момент внешней силы относительно оси, связанной с корпусом и перпендикулярной оси рамки, заставит ось собственного вращения ротора непрерывно прецессировать в сторону от этого первоначального направления. Прецессия будет продолжаться до тех пор, пока ось собственного вращения не окажется параллельной направлению момента силы, т.е. в положении, при котором гироскопический эффект отсутствует. На практике такая возможность исключается благодаря тому, что задаются условия, при которых поворот рамки относительно корпуса не выходит за пределы малого угла.
Если прецессия ограничивается только инерционной реакцией рамки с ротором, то угол поворота рамки в любой момент времени определяется проинтегрированным ускоряющим моментом. Поскольку момент инерции рамки обычно сравнительно мал, она слишком быстро реагирует на вынужденное вращение. Имеются два способа устранить этот недостаток.
Вопрос № 1. Назначение, принцип действия АГД-1 и АГБ-3К. Работа по структурной схеме авиагоризонта дистанционного АГД-1 и АГБ-3К
АГД-1 прибор предназначенный для отображения угловых положений ЛА в пространстве.
Структурная схема АГД-1 приведена на рис. 1, комплект АГД состоит из гировертикали и одного или двух указателей горизонта.
Основными частями гировертикали являются гироузел, система следящей рамы, система коррекции гировертикали, система запуска. Оси гироузла со следящей рамой расположены относительно осей самолета так, как показано на рис. 4 (х и z — продольная и поперечная оси самолета).
Указатель имеет элементы следящих систем указателей крена и тангажа. Связь указателей с гировертикалью осуществляется с помощью дистанционной электрической передачи.
Авиагоризонт АГД работает следующим образом. При появлении крена внешняя рама 5 вместе со следящей рамой 3 поворачивается вслед за самолетом (вертолетом). При этом индукционный датчик 11, расположенный на внешней раме, повернется относительно неподвижного якоря датчика, установленного на оси внутренней рамы 10. С выхода индукционного датчика снимается сигнал (его величина и фаза определяется знаком и величиной угла крена), который после прохождения через контакты коммутатора 23 и усиления в усилителе У поступает на электродвигатель — генератор 1.
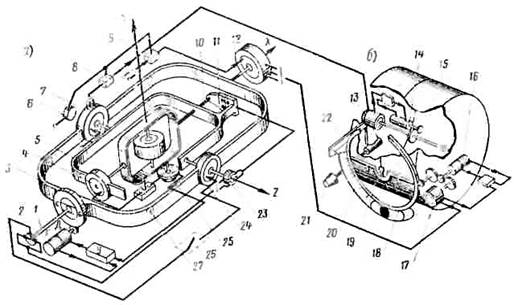 |
Рис.1. Схема АГД-1: а — гиродатчик; б — указатель:
14, 16 — двигатели-генераторы; 2, 6, 23 —коммутаторы; 3 — следящая рама: 4, 24 — коррекциные электродвигатели; 5 — внешняя рама; 7, 12 —сельсин-датчики. 3. 9 — реле; 10 — внутренняя рама; 11 — индукционный датчик; 13, 17 — сельсин-приемники указателей; 15 — картушка со шкалой; 18 — шестерня; 19, 22 —индексы; 20 —шкала на корпусе; 21 — кремальера; 25 — жидкостный маятник; 26 — контакты выключатели коррекции; 27 — жидкостный выключатель
Электродвигатель Д поворачивает следящую раму в сторону увеличения угла между осями у и z до величины  . Для улучшения качества переходного процесса следящей системы от генератора Г к усилителю подводится сигнал скоростной обратной связи.
. Для улучшения качества переходного процесса следящей системы от генератора Г к усилителю подводится сигнал скоростной обратной связи.
Авиагоризонт АГД-1 устанавливают и на легких самолетах, которые могут выполнять фигуры высшего пилотажа. При выполнении петли самолет некоторое время находится в перевернутом положении. При этом следящая рама 3 вместе с двигателем-генератором 1 поворачивается относительно оси внешней рамы на 180° так, что двигатель-генератор 1 находится впереди гироузла. Если в этом случае возникает левый крен самолета, то его левая плоскость, левая сторона следящей рамы и ось внешней рамы двигаются вверх (относительно плоскости горизонта), а магнитопровод. датчика 11 — вниз. При этом электродвигатель 1 будет вращаться против часовой стрелки, что приводит к увеличению угла отклонения внешней рамы от нормали к оси ротора, т. е. к потере устойчивости гироскопа.
Для устранения этого ненормального явления служит коммутатор 23, установленный на оси внешней рамы. Он переключает фазу сигнала индукционного датчика на противоположную в момент перехода самолета через угол тангажа, равный 90°.
Коррекция гировертикали осуществляется с помощью жидкостного маятника 25 и коррекционных электродвигателей 4 и 24. В цепь электродвигателя 24 поперечной коррекции включены контакты 26 выключателя коррекции и контакты 2 диска, закрепленного на оси рамы 3. При разворотах летательного аппарата, продолжающихся более 7-10 сек с угловой скоростью более 0,1—3 град/сек, контакты 26 размыкаются, выключая поперечную коррекцию. Контакты коммутатора 2 выключают эту коррекцию при достижении угла крена определенной величины.
Если продольное ускорение летательного аппарата достигает значения более 1,67 м/сек2, то жидкостный выключатель 27 отключает электродвигатель 4 продольной коррекции. В отличие от маятника 25 этот выключатель имеет всего два контакта. Цепь контактов размыкается воздушным пузырьком при продольных ускорениях.
Сигнал тангажа выдается сельсином-датчиком 7 на сельсин-приемник 13 указателя. С сельсин-приемника сигнал после усиления усилителем У поступает на двигатель-генератор 14, который через редуктор перемещает картушку 15 со шкалой тангажа указателя.
Сигнал крена выдается сельсином-датчиком 12 на сельсин-приемник 17 указателя, а затем после усиления в усилителе У поступает на двигатель-генератор 16. Последний через редуктор вращает шестерню 18 указателя крена.
Отсчет углов тангажа производится по шкале картушки и по индексу 19, а углов крена — по шкале 20, которая расположена на корпусе прибора и по концу силуэта самолета, закрепленного на шестерне 18.
Кремальерой 21 осуществляется совмещение линии горизонта картушки с нулевой отметкой на шкале 20 указателя, если в горизонтальном полете произошло изменение угла атаки. При повороте кремальеры 21 поворачиваются статор сельсина-приемника 13 тангажа и индекс 22. Индекс 22 укажет при этом по шкале 20 указателя значение угла атаки самолета.
Применяемые в АГД полупроводниковые усилители — однотипны. Два из них расположены в корпусе указателя, а один — в корпусе гироагрегата.
На оси 2 внешней рамы гироузла расположен второй коммутатор 6. Он работает следующим образом. Когда угол тангажа становится равным 90°, коммутатор подает питание на реле 8 и 9, которые переключают порядок чередования фаз сельсинов-приемников тангажа и крена. В результате этого с выхода сельсин-приемника 12 крена появляется сигнал противоположного знака и электродвигатель 16 быстро повернет шестерню 18 с указателем крена на угол 180°, устанавливая силуэт самолета в перевернутое.положение.
Для того чтобы не произошло аналогичного перемещения шкалы 15 тангажа, одновременно с переключением фаз обмотки статора сельсина-приемника 13 тангажа переключаются и фазы обмотки его ротора. Вследствие этого при увеличении углов тангажа более 90° шкала тангажа будет двигаться в обратном направлении к линии горизонта.
В АГД благодаря электрической связи системы индикации с гироскопом индикация углов тангажа получается естественной, т.е. так как окраска верхней части шкалы тангажа голубая, а нижней — коричневая, то летчик видит на авиагоризонте взаимное расположение летательного аппарата, Земли и неба таким, каким оно существует в действительности.
Кроме того, в АГД гироагрегат располагается не на приборной доске, а вблизи центра масс самолета, обеспечивает устойчивость гировертикали и высокую точность выдаваемых сигналов. В связи с этим авиагоризонт АГД используется как датчик углов крена и тангажа для различных автоматических систем (курсовых систем, автопилота и др.).
Устанавливается на самолётах: Л-29, Л-39, Як-18Т, Ан-12, Ан-24, Ан-26, Ил-18, Ту-134 и многих других.
Авиагоризонт АГБ-3 предназначен для использования его в качестве резервного совместно с авиагоризонтом АГД-1. Он отличается АГД-1, что является не дистанционным прибором. Прибор применяется на вертолетах Ми-8 и Ми-10. на самолетах Як-40, Ан-24, Ан-26, Ан-30, Ил-76 и других летательных аппаратах.
АГБ-3 устанавливается на самолетах с дозвуковыми скоростями как резервный и на вертолетах в качестве основного. Он позволяет выдавать внешним потребителям (системе автоматического управления и навигации) электрические сигналы, пропорциональные углам крена и тангажа в пределах: по крену ± 360°; по тангажу ± 80°. При углах тангажа порядка 85—87° авиагоризонт может выбиваться, при этом его рамы совмещаются в одной плоскости и гироскоп теряет одну степень свободы.
По принципу действия АГБ-3 аналогичен АГД - 1, но только в нем следящие системы индикации крена и тангажа находятся в самом корпусе прибора.
Авиагоризонт АГБ-3 состоит из следующих основных элементов: гироузла; системы коррекции для удержания оси ротора гироскопа в вертикальном положении; следящей системы передачи угла тангажа на указатель, которая дает возможность получить естественную индикацию по тангажу; упоров, предотвращающих совмещение оси внешней рамки с осью ротора гироскопа при выполнении самолетом фигур высшего пилотажа; арретирующего устройства; передачи углов крена на указатель, воспроизводящий правильные крены.
На самолете авиагоризонт располагается таким образом, что ось внешней рамки карданного подвеса параллельна продольной оси самолета, а ось внутренней рамки — поперечной оси самолета.
Такое расположение осей карданного подвеса на самолете обеспечивает независимость устойчивости гироскопа от углов крена и показания истинных углов крена и тангажа.
Показания авиагоризонта, определяющие положение самолета относительно плоскости истинного горизонта по крену и тангажу, осуществляются следующим образом (рис. 2).
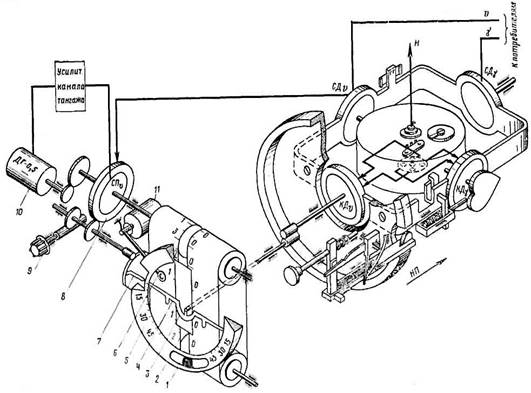 |
Рис. 2. Принципиальная электрокинематическая схема авиагоризонта АГБ-3;
1 — указатель скольжения; 2 — шкала тангажа; 3 — шпилька; 4 — силуэт самолетика; 5 — шкала крена; 6 — флажок сигнализатора отказа питания; 7 — индекс; 8 — дифференциальные сельсин-прнёмники: 9 — кремальера; 10 — двигатель отработки
Крены самолета имитируются поворотом силуэта самолетика 4. По положению крыльев силуэта самолетика относительно линии искусственного горизонта определяется направление крена. Отсчет углов крена производится по шкале кренов 5, стрелкой является конец крыла силуэта самолетика 4. Для того чтобы показания крена соответствовали действительному, силуэт-самолетик связан с осью карданной рамы через зубчатую передачу с отношением 1:1.
Углы тангажа определяются по положению конца шпильки 3 силуэта самолетика относительно шкалы тангажа 2. Для большей наглядности шкала тангажа выше линии искусственного горизонта окрашена в голубой цвет (небо), ниже — в коричневый цвет (земля). При наборе самолетом высоты линия искусственного горизонта опускается ниже конца шпильки 3, при спуске — поднимается выше конца шпильки 3.
В левом верхнем углу на фоне шкалы тангажа при отключенном питании виден флажок 6 сигнализатора отказа питания. При включенном питании флажок убирается из видимой зоны шкалы тангажа. В правом верхнем углу передней панели прибора расположена кнопка арретира с надписью «нажать перед пуском». В левом нижнем углу расположена кремальера 9. С левой стороны лицевой части прибора выведен индекс 7 механизма кремальеры. В нижней части переднего фланца прибора расположен указатель скольжения 1, обеспечивающий контроль за правильностью выполнения разворотов.
При координированном развороте шарик указателя скольжения должен оставаться между рисками — отклонения шарика свидетельствуют о наличии скольжения.
Гиросистема авиагоризонта представляет собой трехстепенной гироскоп, на кожухе в нижней его части которого укреплен жидкостный маятник, управляющий коррекционными двигателями КДθ и КДθ. Вместе с этими двигателями на осях карданного подвеса находятся сельсины-датчики СДθ и СДθ, выдающие электрические сигналы, пропорциональные углам крена и тангажа.
Сельсин-датчик СДθ выдает тангаж не только потребителям, но и в следящую систему индикации угла тангажа.
Следящая система угла тангажа состоит из дифференциального сельсина-приемника СПθ 8, усилителя капала тангажа и двигателя отработки типа ДГ-0,5-10. При тангаже самолета сельсин-датчик СДθ выдает сигнал на сельсин-приемник СПθ, который, отрабатываясь следящей системой, подается на шкалу тангажа 2, выполненную в виде лентопротяжного механизма.
Для выполнения полета с некоторым заданным углом атаки предусмотрена кремальера 9 с указательным индексом 7. При ее повороте разворачивается статор сельсина-приемника СПθ, что приводит к рассогласованию следящей системы угла тангажа. Отрабатывая это рассогласование, следящая система подает значение утла атаки на шкалу тангажа 2. Таким образом, выдерживая совмещенным силуэт-самолетик с линией искусственного горизонта на шкале тангажа, самолет будет лететь не в линии горизонта, а с. заданным углом атаки (набор высоты с заданным углом тангажа).
Для арретирования гироузла в авиагоризонте предусмотрено арретирующее устройство, состоящее из кнопки арретира, системы рычагов, толкателей и двух кулачков. Один кулачок выполнен в виде торцового среза на карданной раме, другой — в виде двух симметричных спиралей. Второй кулачок укреплен на оси внутренней рамки гироузла. При нажатии на кнопку арретирования усилия передаются на кулачки и устанавливают гироузел в положение, перпендикулярное горизонтальному основанию прибора.
Авиагоризонт АГБ - 3, установленный на легком самолете, не теряет полностью устойчивости при выполнении фигур пилотажа.
Для предотвращения совмещения осей карданного подвеса с осью гироскопа в авиагоризонте применены упоры.
В случае выполнения фигуры «петля» при углах тангажа ±84" карданная рама касается упора гироузла и начинает на него давить с некоторым усилием. Возникающий при этом момент, вектор которого направлен вдоль оси внутренней рамки, вызывает прецессионное движение гироскопа вокруг оси внешней карданной рамы. Как только гироскоп повернется на 180°, упор карданной рамки отойдет от упора гироузла — прецессионное движение прекратится. Силуэт-самолетик в этот момент будет показывать положение самолета, перевернутое на 180°.
При выполнении «петли» благодаря упорам полного совмещения оси ротора гироскопа и оси карданной рамы не происходит, при этом устойчивость гироскопа при углах, близких к 90°, теряется не полностью. Упоры выполнены таким образом, что после выполнения «петли» с угловыми скоростями до 12 град/сек, погрешность прибора не превышает 4—5°.
В авиагоризонте предусмотрена сигнализация отказа питания, реагирующая на отсутствие постоянного и переменного тока в приборе. Сигнализация срабатывает также в случае обрыва любой фазы переменного тока на участке от штепсельного разъема до коллектора гироузла и в случае обрыва не менее двух выходных концов обмотки статора гиромотора.
Для уменьшения погрешности при действии длительных односторонних ускорений (набор скорости, торможение, вираж) в приборе предусмотрено отключение поперечной коррекции с помощью ВК.-53РБ и продольной коррекции специальным устройством (акселерометром). При выключенной коррекции прибор накапливает погрешность со скоростью собственного ухода, равной 0,3—0,5 град/мин.




















 Например, при отклонении гировертикали от оси у вперед по направлению полета с контактов и маятника поступит сигнал на электродвигатель 3 (см. рис. 4), который создает вращающий момент на оси Х1 гироскопа 14. Гироскоп начинает прецессировать в плоскости оси Х1, поворачивая платформу 7 к положению вертикали.
Например, при отклонении гировертикали от оси у вперед по направлению полета с контактов и маятника поступит сигнал на электродвигатель 3 (см. рис. 4), который создает вращающий момент на оси Х1 гироскопа 14. Гироскоп начинает прецессировать в плоскости оси Х1, поворачивая платформу 7 к положению вертикали.
Для быстрого установления платформы 7 в положение вертикали служат механические маятники, цепи которых замыкаются через контакты кнопки, расположенной на приборной доске. При «завале» платформы на угол больший 1,5—2° маятники замыкают спои контакты, подавая полное напряжение на электродвигатели 10 и 4, которые устанавливают платформу 7 вертикально с точностью до 1,5—2°. Дальнейшее установление гировертикали обеспечивается с помощью жидкостного маятника и коррекционных двигателей.
Погрешность выдерживания вертикали при внешних возмущающих моментах не превышает 2,5-15 угловых минут. Погрешности, вызываемые ускорениями самолета, уменьшаются за счет выключения поперечной коррекции на виражах и продольной коррекции при продольных ускорениях.
Вывод: созданные АГД и АГБ устанавливаемые на бортах обеспечивают считывание информации для обеспечения пространственной ориентировки экипажей ЛА. Возможна установка обеих приборов на борту для обеспечения дублирования и резервирования.

