




1.4.1 Рассмотрим автоматическую систему, состоящую из объекта управления (системы вида (1.16)) и управляющего устройства
 ,
,  и
и  ,
,  . (1.38)
. (1.38)
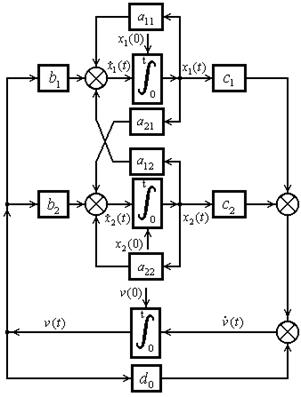
В развернутом виде описание системы (1.38) следующее
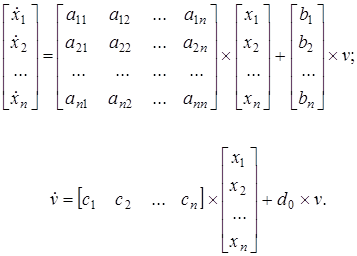 (1.39)
(1.39)
В скалярном виде описание системы (1.19) следующее
 (1.40)
(1.40)
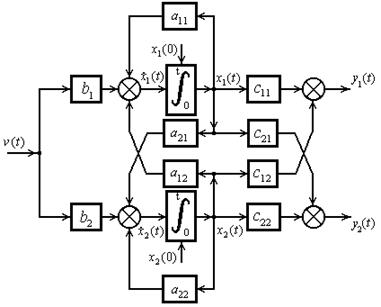
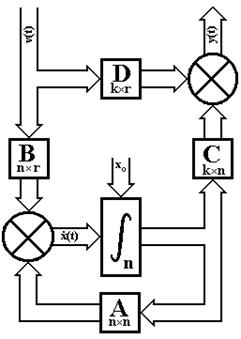
Структура системы представлена на рисунке 12.
Матрица состояния системы (1.38) при 
 .
.
Характеристическое уравнение системы (1.38) при следующее
 (1.40)
(1.40)
где  ;
;
 ;
;
 ;
;
 .
.
Условия устойчивости системы (1.38) при следующие:  ,
,  (условия А.Стодолы) и
(условия А.Стодолы) и  (критерий И.А. Вышнеградского).
(критерий И.А. Вышнеградского).
1.4.2 Рассмотрим автоматическую систему, состоящую из объекта управления (системы вида (1.31)) и управляющего устройства
 , и
, и  ,
,  . (1.41)
. (1.41)
В развернутом виде описание системы (1.19) следующее
 (1.42)
(1.42)
В скалярном виде описание системы (1.41) следующее
 (1.43)
(1.43)
Структура системы представлена на рисунке 13.
Матрица состояния системы (1.41) при , 
 .
.
Характеристическое уравнение системы (1.41) при и следующее
 (1.44)
(1.44)
Для устойчивости системы (1.41) при , необходимо и достаточно, чтобы для уравнения (1.44) выполнялись условия: , ,  (условия А.Стодолы) и
(условия А.Стодолы) и
 ,
,  ,
,
получаемые в соответствии с критерием А.Гурвица
а)

| б)

|
Рисунок 1 - Структура системы (1.1) а) в общем виде; б) при
а)

| б)

|
Рисунок 2 – Структура системы (1.4) а) в общем виде; б) при
а)

| б)

|
Рисунок 3 – Структура системы (1.7) а) в общем виде; б) при и 
а)

| б)

|
Рисунок 4 – Структура системы (1.10) а) в общем виде; б) при
а)

| б)

|
Рисунок 5 – Структура системы (1.13) а) в общем виде; б) при и 
а)

| б)

|
Рисунок 6 – Структура системы (1.16) а) в общем виде; б) при
а)

| б)

|
Рисунок 7 – Структура системы (1.19) а) в общем виде; б) при
а)

| б)
|
Рисунок 8– Структура системы (1.22) а) в общем виде; б) при
а)

| б)

|
Рисунок 9 - Структуры системы (1.25) а) в общем виде; б) при , и
а)

| б)

|
Рисунок 10 – Структуры системы (1.28) а) в общем виде; б) при , и
а)
| б)

|
Рисунок 11 – Структура системы (1.31) а) в общем виде; б) при , и
а)

| б)
|
Рисунок 12 – Структура системы (1.38) а) в общем виде; б) при
а)

| б)

|
Рисунок 13 - Структура системы (1.41) при а) в общем виде; б) при ,
1.5 Понятия управляемости и наблюдаемости
1.5.1 История вопроса. Понятия: «Управляемость» и «Наблюдаемость» были введены и сформулированы в 60-х годах прошлого столетия американским математиком Р. Калманом (R.E. Kalman).
 Рудольф Эмиль Калман родился 19 мая 1930 года в г. Будапеште. Получил степени бакалавра (1953) и магистра (1954) электротехники в Масачусетском технологическом институте, а докторскую степень (1957) – в Колумбийском университете (США).
Рудольф Эмиль Калман родился 19 мая 1930 года в г. Будапеште. Получил степени бакалавра (1953) и магистра (1954) электротехники в Масачусетском технологическом институте, а докторскую степень (1957) – в Колумбийском университете (США).
С 1954 по 1964 работал в Принстонском институте перспективных исследований, где получил ряд выдающихся результатов, позволяющих считать его одним из основателей современной теории систем и теории управления. Фильтр Калмана, критерии управляемости и наблюдаемости Калмана, лемма Якубовича-Калмана известны далеко за пределами теории управления. Разработанные им концепции и методы широко используются инженерами и исследователями в различных областях науки и техники.
Р.Калман является почетным доктором многих университетов, членом ряда академий, лауреатом нескольких престижных премий, в том числе премии Киото (1985), часто называемой «Азиатской Нобелевской премией». В 1994 году он был избран иностранным членом Российской академии наук.
Данные понятия имеют практическое значение при управлении сложными объектами, математическими образами которых служат многомерные автоматические системы.
1.52 Постановка задачи. Дана линейная многомерная стационарная система управления, поведение которой описывается уравнениями состояния и выхода:

 , (1.45)
, (1.45)
где  -
-  - мерный вектор состояния;
- мерный вектор состояния;  -
-  - мерный вектор управления (входа);
- мерный вектор управления (входа);  -
-  - мерный вектор наблюдения (выхода);
- мерный вектор наблюдения (выхода);  - матрицы вещественных коэффициентов размера
- матрицы вещественных коэффициентов размера  ,
,  и
и  соответственно.
соответственно.
Система (1.45) называется вполне управляемой по состоянию, если выбором управляющего воздействия на промежутке времени  можно перевести систему из любого начального состояния
можно перевести систему из любого начального состояния  в произвольное заранее заданное конечное состояние
в произвольное заранее заданное конечное состояние  .
.
Система (1.45) называется вполне управляемой по выходу, если выбором управляющего воздействия на промежутке времени можно перевести систему из любого начального состояния в такое конечное состояние, при котором обеспечивается заранее заданное произвольное значение выхода  .
.
Система (1.45) называется вполне наблюдаемой, если по реакции на выходе системы на промежутке времени при заданном управляющем воздействии можно определить начальное состояние .
Постановка задачи формулируется следующим образом: пусть известны матрицы системы (1.45). Требуется определить, является ли система вполне управляемой и наблюдаемой.
1.5.3 Критерии управляемости и наблюдаемости. 1) Критерий управляемости по состоянию. Для того чтобы система (2.1) была вполне управляемой по состоянию, необходимо и достаточно, чтобы ранг матрицы управляемости по состоянию

равнялся размерности вектора состояния:
 . (1.46)
. (1.46)
2) Критерий управляемости по выходу. Для того чтобы система (1.46) была вполне управляемой по выходу, необходимо и достаточно, чтобы ранг матрицы управляемости по выходу

равнялся размерности вектора выхода:
 . (1.47)
. (1.47)
3) Критерий наблюдаемости. Для того чтобы система была вполне наблюдаемой, необходимо и достаточно, чтобы ранг матрицы наблюдаемости

равнялся размерности вектора состояния:
 . (1.48)
. (1.48)
1.5.4 Пояснения. Пусть дана прямоугольная матрица  (или
(или  ) - таблица любых
) - таблица любых  чисел, расположенных в
чисел, расположенных в  строках и
строках и  столбцах
столбцах
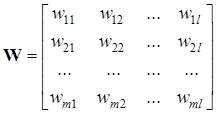 . (1.49)
. (1.49)
В частном случае при  матрица является квадратной.
матрица является квадратной.
Пусть  – любое натуральное число, не превышающее и . Выберем в произвольным образом -строчек и -столбцов. Из элементов матрицы , лежащих на пересечении выбранных строчек и столбцов, можно образовать определитель, который и называется минором -го порядка матрицы .
– любое натуральное число, не превышающее и . Выберем в произвольным образом -строчек и -столбцов. Из элементов матрицы , лежащих на пересечении выбранных строчек и столбцов, можно образовать определитель, который и называется минором -го порядка матрицы .
Если в матрице все миноры –го порядка равны нулю, то равны нулю и все миноры более высокого порядка (если таковые существуют).
Рангом матрицы называется такое целое число , что среди миноров –го порядка матрицы имеется хотя бы один, не равный нулю, а все остальные  –го порядка (если только их можно составить) сплошь равны нулю
–го порядка (если только их можно составить) сплошь равны нулю
(Боревич З.И. Определители и матрицы: Учеб.пособие для вузов.- 3-е изд. - М.: Наука. Гл.ред.физ.-мат. лит., 1988.- 184 с.).
1.5.5 Частный случай. Рассмотрим линейную многомерную стационарную систему управления следующего вида
 , (1.50)
, (1.50)
где, в отличие от системы (1.45),  - матрица-столбец размерности (
- матрица-столбец размерности ( );
);  - матрица-строка размерности (
- матрица-строка размерности ( );
);  - управляющая переменная (скалярная величина).
- управляющая переменная (скалярная величина).
Система (1.50) является полностью (вполне) управляемой (по состоянию), если выполняется условие
 . (1.51)
. (1.51)
Система (1.50) является полностью (вполне) наблюдаемой, если выполняется условие
 . (1.52)
. (1.52)
Пример 1. Система задана следующим описанием
 ,
, 
 ;
;  ,
,  .
.
Определить значения параметра  , для которых система обладает свойством полной наблюдаемости.
, для которых система обладает свойством полной наблюдаемости.
Условие полной наблюдаемости:  .
.
 ,
,  ,
,  ,
,

 .
.
Ответ: при  (или
(или  ,
,  ) система обладает свойством полной наблюдаемости.
) система обладает свойством полной наблюдаемости.
Пример 2. Система задана следующим описанием
 ,
,  ,
,  , .
, .
Определить значения параметра  , для которых система обладает свойством полной управляемости.
, для которых система обладает свойством полной управляемости.
Условие полной управляемости системы:  .
.
 ,
,  ,
,  ,
,
 .
.
 .
.
Ответ: при  и
и  система обладает свойством полной управляемости.
система обладает свойством полной управляемости.

