




ЦИФРОВАЯ ОБРАБОТКА СИГНАЛОВ
Digital signals processing. Digital recursive filters.
Тема 9. РЕКУРСИВНЫЕ ЦИФРОВЫЕ ФИЛЬТРЫ
Рекурсия – свойство живой природы. И амеба, и человек принимают решения на основании текущей ситуации и прошлого опыта. Это самое удачное решение Всевышнего при сотворении Мира.
Писецкий. Уральский геофизик, XX в.
Творца и отца Вселенной и найти то трудно. А найдя, нельзя показать его толпе.
Платон. Греческий философ, IV в д.н.э.
Содержание
Введение.
1. Принципы рекурсивной фильтрации. Конструкция РЦФ. Каскадная форма. Параллельная форма. Стандартные блоки рекурсивных фильтров. Устранение сдвига фазы.
2. Разработка рекурсивных цифровых фильтров. Этапы разработки рекурсивных фильтров. Метод размещения нулей и полюсов. Метод инвариантного преобразования. Согласованное z-преобразование. Билинейное z-преобразование.
3. Режекторные и селекторные фильтры. Комплексная z-плоскость. Режекторный фильтр постоянной составляющей сигнала. Режекторный фильтр произвольной частоты. Селекторные фильтры.
4. Билинейное z-преобразование. Принцип преобразования. Деформация частотной шкалы.
5. Типы рекурсивных частотных фильтров. Аппроксимационная задача. Передаточная функция. Виды фильтров.
Введение
Высококачественные частотные нерекурсивные цифровые фильтры (НЦФ) имеют, как правило, большую ширину окна (многочленный оператор фильтра). Чем меньше допустимая ширина переходной зоны частотной характеристики фильтра между полосами пропускания и подавления, тем больше окно фильтра. Альтернативное решение - применение рекурсивных цифровых фильтров (РЦФ), для которых количество коэффициентов фильтра может быть сокращено по сравнению с НЦФ.
Рекурсивные фильтры имеют определенную "память" по значениям предыдущих отсчетов, которая, в пределе, может быть бесконечной. С учетом этого фактора рекурсивные фильтры получили название фильтров с бесконечной импульсной характеристикой (БИХ-фильтров), в отличие от нерекурсивных фильтров, всегда имеющих конечную импульсную характеристику (КИХ-фильтры). Реакция рекурсивного фильтра на сигнал с учетом "памяти" исключает возможность создания фильтров с четным импульсным откликом, и частотные характеристики рекурсивных фильтров всегда являются комплексными. Проектирование рекурсивных частотных фильтров с заданными частотными характеристиками осуществляется с использованием z-преобразований.
Принципы рекурсивной фильтрации.
Конструкция РЦФ отображается в z-образе передаточной функции фильтра в виде отношения двух многочленов:
H(z) = H0+H1z+H2z2+...= B(z)/[1+A(z)], (9.1.1)
где: B(z) = B0+B1z+B2z2+... +BNzN, A(z) = A1z+A2z2+... +AMzM.
Естественно, что переход на РЦФ имеет смысл только в том случае, если степень многочленов A(z) и B(z) во много раз меньше степени многочлена H(z) прямого z-преобразования импульсной реакции фильтра. При z-образе входных данных Х(z), на выходе РЦФ имеем:
Y(z) = H(z)Х(z) = X(z)B(z)/[1+A(z)],
Y(z)[1+A(z)] = Y(z)+Y(z)A(z) = X(z)B(z),
Y(z) = X(z)B(z)-Y(z)A(z). (9.1.2)
При обратном z-преобразовании выражения (9.1.2) получаем уравнение рекурсивной цифровой фильтрации:
yk =  bn xk-n –
bn xk-n –  am yk-m. (9.1.3)
am yk-m. (9.1.3)
Рекурсивная фильтрация требует задания начальных условий как по xk, так и по yk при k<0. Схема рекурсивной фильтрации приведена на рис. 9.1.1.
 Рис. 9.1.1. Схема РЦФ. Рис. 9.1.1. Схема РЦФ.
|
Как следует из выражения (9.1.3), при вычислении значения уk текущей точки используются предыдущие вычисленные значения yk-m, (m>0), что и определяет принцип рекурсии - фильтрации с обратной связью. Другой особенностью РЦФ является их односторонность и физическая реализуемость в реальном масштабе времени. При машинной обработке данных многочлен B(z) передаточной функции фильтра может реализоваться и в двухстороннем варианте.
Одно из важнейших свойств рекурсивных фильтров - возможность получения узких переходных зон при конструировании частотных фильтров, так как функция H(z) фильтра может резко изменяться при приближении к нулю (но не нулевого) многочлена в знаменателе (9.1.1).
Рекурсивная фильтрация требует более высокой точности вычислений по сравнению с нерекурсивной, т.к. использование предыдущих выходных отсчетов для текущих вычислений может приводить к накапливанию ошибок. Особое значение это имеет для фильтров с передаточными функциями высоких порядков (M>3), которые чувствительны к эффектам конечной разрядности. Такие фильтры, как правило, разбиваются на фрагменты – звенья второго и/или первого порядка, и реализуются в каскадной или в параллельной форме.
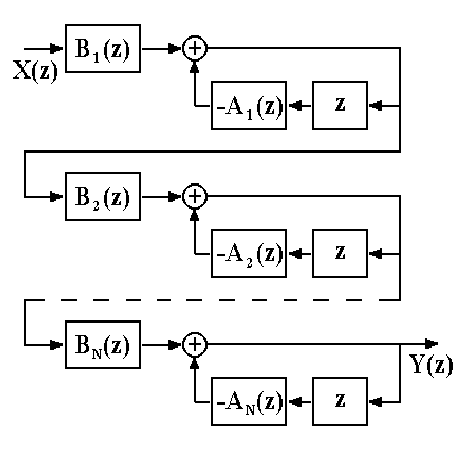 Рис. 9.1.2. Каскадная форма.
Рис. 9.1.2. Каскадная форма.
|
Каскадная форма. Находятся корни многочленов А(z), B(z) и производится разложение H(z):
H(z) =  , (9.1.4)
, (9.1.4)
где G - масштабный множитель. Это позволяет применять каскадное построение фильтров, показанное на рис. 9.1.2, в котором:
H(z) = G H1(z) H2(z)..... HN(z),
Hn(z) = Bn(z)/An(z). (9.1.5)
Функции Аn(z) и Bn(z) обычно представляются в виде биквадратных блоков (фильтров второго порядка):
Bn(z) = bn.0 + bn.1 z + bn.2 z2, An(z) = 1 + an.1 z + an.2 z2.
В принципе, порядок расположения блоков в каскадной форме, равно как и порядок множителей B(z) и A(z) в числителе и знаменателе функции (9.1.4), значения не имеет. Однако следует учитывать, что полюса знаменателя, близкие к единичной окружности на z-плоскости (близкие по модулю к 1) формируют большие коэффициенты усиления на соответствующих частотах в блоках, в которых они находятся, и при обработке сигналов могут вызывать переполнение разрядов числовых ячеек этих блоков, если их разрядность ограничена. С учетом этого при формировании каскадов желательно объединять в пары Bi(z)/Ai(z) нули и полюса, близкие по модулю к 1, и располагать их в концевые блоки каскадной формы. Такое комбинирование полезно также с позиций наилучшего отношения сигнал/шум.
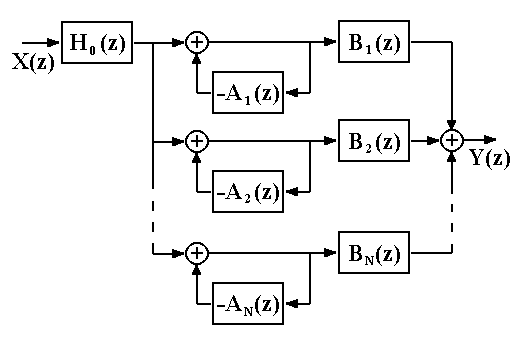 Рис. 9.1.3. Параллельная форма.
Рис. 9.1.3. Параллельная форма.
|
Параллельная форма. Функция H(z) разлагается на элементарные дроби:
H(z) = Ho(z) Bn(z) / [1+An(z)],
что дает параллельную форму фильтра, показанную на рис. 9.1.3. Параллельная конструкция фильтра применяется реже каскадной, хотя это может объясняться и тем, что в аналоговых фильтрах, исторически предшествовавших цифровым фильтрам, теоретическая база анализа и синтеза каскадных рекурсивных фильтров получила детальное развитие.
Стандартные блоки рекурсивных фильтров обычно реализуются биквадратными звеньями в канонической форме, которая имеет минимальное количество элементов задержки. Уравнения звена:
v(k) = x(k) –  a(n) v(k-n), y(k) =
a(n) v(k-n), y(k) =  b(n) v(k-n). (9.1.6)
b(n) v(k-n). (9.1.6)
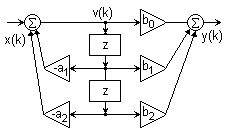 Рис. 9.1.4. Каноническая форма
Рис. 9.1.4. Каноническая форма
|
Функциональная схема реализации звена приведена на рис. 9.1.4.
Вторая форма реализации – по уравнению (9.1.5) в прямой форме, приведенная на рис. 9.1.5:
y(k) = b(n) x(k-n) – a(n) y(k-n). (9.1.7)
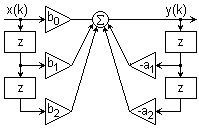 Рис. 9.1.5. Прямая форма Рис. 9.1.5. Прямая форма
|
При определенных условиях прямая форма лучше канонической с точки зрения шумовых характеристик.
При нулевых значениях коэффициентов a2 и b2 звенья второго порядка превращаются в звенья первого порядка.
Устранение сдвига фазы. Рекурсивные фильтры являются фазосдвигающими фильтрами. Если требуется обеспечить нулевой фазовый сдвиг, то операция фильтрации производится дважды, в прямом и обратном направлении числовой последовательности массива данных, при этом амплитудно-частотная характеристика (АЧХ) фильтрации будет равна |H(w)|2 фильтра, что необходимо учитывать при конструировании фильтра.

