




ЛИНЕЙНЫЕ НЕПРЕРЫВНЫЕ МОДЕЛИ
И ХАРАКТЕРИСТИКИ СИСТЕМ УПРАВЛЕНИЯ
2.1 Модели "вход - выход"
2.1.1 Дифференциальные уравнения типовых звеньев и систем
2.1.1.1 Постановка задачи математического описания линейной САУ
Типовые задачи ТАУ (анализ и синтез) для своего решения требуют математического описания САУ. Создание такого описания, т.е. построение математической модели системы (ММ), обычно проводят при помощи декомпозиции САУ. Систему разделяют на элементы и составляют уравнения, описывающие их поведение (движение) – изменение состояния во времени. Уравнения составляют на основе законов сохранения энергии или вещества. При этом САУ идеализируют (линеаризация, стационаризация). Результирующими уравнениями обычно являются обыкновенные дифференциальные уравнения (ОДУ) с постоянными коэффициентами. Кроме дифференциальных уравнений в качестве ММ применяют передаточные функции (ПФ), которые позволяют представлять ММ системы в виде алгоритмических структурных схем. К ММ относят также временнÏе и частотные характеристики САУ, которые совместно с ПФ составляют классический математический аппарат ТАУ, позволяющий анализировать и синтезировать САУ без интегрирования уравнений.
2.1.1.2 Понятие динамического звена
 Для расчета САУ их разбивают на динамические звенья (ДЗ). Под ДЗ понимают ММ некоторой части САУ любого физического вида и конструктивного оформления. Элементы САУ, различные по физической природе, конструкции, мощности и т.д., но описываемые линейными дифференциальными уравнениями одного и того же вида, являются одинаковыми ДЗ. У каждого ДЗ может быть лишь одна входная и одна выходная величины (рисунок 2.1).
Для расчета САУ их разбивают на динамические звенья (ДЗ). Под ДЗ понимают ММ некоторой части САУ любого физического вида и конструктивного оформления. Элементы САУ, различные по физической природе, конструкции, мощности и т.д., но описываемые линейными дифференциальными уравнениями одного и того же вида, являются одинаковыми ДЗ. У каждого ДЗ может быть лишь одна входная и одна выходная величины (рисунок 2.1).
ДЗ обладают свойством однонаправленности. Сложные звенья разделяют на простейшие составные части – типовые ДЗ. Под типовым ДЗ понимают звено, порядок дифференциального уравнения которого не превышает второго.
2.1.1.3 Дифференциальное уравнение динамического звена
В общем случае ДЗ описывают следующим ОДУ:
 , (2.1)
, (2.1)
где x (t) и y (t) – входная и выходная величины ДЗ;
a 2– a 0; b 1– b 0 – коэффициенты (постоянные) уравнения.
Более употребительны в ТАУ иные формы записи этого ДУ. Обычно уравнение (2.1) записывают в символическом виде
 , (2.2)
, (2.2)
где  – оператор дифференцирования.
– оператор дифференцирования.
Для решения типовых задач ТАУ дифференциальное уравнение ДЗ (2.1) преобразуют по Лапласу (или Карсону-Хевисайду) заменой оператора дифференцирования p комплексной величиной преобразования Лапласа s = j w. Целью названного преобразования является замена операций дифференцирования и интегрирования оригиналов функций y (t) и x (t) алгебраическими действиями над их изображениями Y (s) и X (s), поскольку уравнение (2.1) преобразуется в алгебраическое
 (2.3)
(2.3)
При нулевых начальных условиях p º s.
Если свободные члены a 0 = 1 и b 0 = 1, уравнение (2.3) приобретает нормированный вид
 . (2.4)
. (2.4)
Такую форму записи ДЗ или САУ называют первой стандартной символической (операторной) формой записи. Уравнения (2.1) - (2.4) относят к уравнениям типа " вход - выход ".
2.1.1.4 Дифференциальное уравнение САУ
В общем случае замкнутую САУ описывают неоднородным ДУ n -го порядка:

 (2.5)
(2.5)
где x (t) – входная (управляющая или возмущающая) величина;
y (t) – выходная (управляемая) величина;
an, an -1, …, a 0; bm, bm -1, …, b 0 – постоянные коэффициенты (m < n),
или в операторном виде

 . (2.6)
. (2.6)
Однородное уравнение
 (2.7)
(2.7)
называют характеристическим уравнением замкнутой САУ.
Обозначив полиномы от s
 (2.8)
(2.8)
и
 , (2.9)
, (2.9)
характеристическое уравнение можно записать в виде
 =0,
=0,
а операторное уравнение замкнутой САУ в виде
 . (2.10)
. (2.10)
2.1.1.5 Линеаризация дифференциальных уравнений реальных САУ
 Реальные САУ практически являются нелинейными. Система содержит один или несколько нелинейных элементов (люфт, насыщение, упор и т.д.). Выделяют нелинейные САУ, которые при определенных условиях можно линеаризовать, т.е. преобразовать их ММ к уравнению типа (2.5). Линеаризация нелинейности уравнения ДЗ заключается в замене этой нелинейной функции y = f (x) приближенной линейной зависимостью
Реальные САУ практически являются нелинейными. Система содержит один или несколько нелинейных элементов (люфт, насыщение, упор и т.д.). Выделяют нелинейные САУ, которые при определенных условиях можно линеаризовать, т.е. преобразовать их ММ к уравнению типа (2.5). Линеаризация нелинейности уравнения ДЗ заключается в замене этой нелинейной функции y = f (x) приближенной линейной зависимостью  . Аналитически эту операцию основывают на разложении функции y = f (x) в ряд Тейлора в окрестности точки (x 0, y 0) исследуемого режима. Такую линеаризацию можно выполнить графически (рисунок 2.2).
. Аналитически эту операцию основывают на разложении функции y = f (x) в ряд Тейлора в окрестности точки (x 0, y 0) исследуемого режима. Такую линеаризацию можно выполнить графически (рисунок 2.2).
В результате линеаризации ММ обретает вид линейного ДУ в отклонениях или вариациях.
2.1.2 Передаточная функция звена и САУ
2.1.2.1 Передаточная функция звена
Передаточной функцией (ПФ) звена или САУ называют отношение преобразования Лапласа Y (s) сигнала на выходе системы y (t) к преобразованию Лапласа X (s) сигнала на входе x (t) при нулевых начальных условиях  :
:
 . (2.11)
. (2.11)
Согласно определению следует, что
Y (s)= W (s) X (s), (2.12)
а также
 , (2.13)
, (2.13)
где  ;
;  – полиномы от s.
– полиномы от s.
Форму записи ДУ САУ (2.12) посредством ПФ называют второй стандартной формой записи ДУ. Форму записи ПФ (2.13) называют полиномиальной.
ПФ представляет собой дробно-рациональную функцию от s. Порядок числителя ПФ реальной системы не превышает порядка знаменателя. Коэффициенты вещественны, так как являются функциями вещественных параметров звена или САУ.
 Значения s, при которых ПФ обращается в нуль, называют нулями ПФ. Нули являются корнями уравнения B (s) = 0.
Значения s, при которых ПФ обращается в нуль, называют нулями ПФ. Нули являются корнями уравнения B (s) = 0.
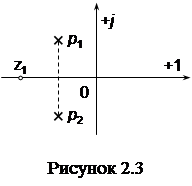
Значения s, при которых ПФ обращается в бесконечность, называют полюсами ПФ. Полюсы являются корнями уравнения A (s) = 0.
Таким образом, ПФ имеет m нулей и n полюсов. Они могут быть действительными или комплексно-сопряженными, поэтому их изображают на комплексной плоскости s в соответствии с рисунком 2.3.
Передаточную функцию (2.13) можно разложить на множители и представить в виде
 , (2.14)
, (2.14)
где z 1 – ноль ПФ;
p 1; p 2 – полюсы ПФ.
В рассматриваемом примере



2.1.2.2 Передаточные функции типовых звеньев
Вид ПФ определяет класс и тип ДЗ. Типовые звенья разделяют на два класса:
– обыкновенные или минимально-фазовые, полюсы и нули которых имеют отрицательные или нулевые вещественные части;
– особые или неминимально-фазовые, у которых хотя бы один ноль или полюс имеет положительную действительную часть.
Среди обыкновенных ДЗ различают: позиционные (статические), интегрирующие (астатические) и дифференцирующие ДЗ.
К позиционным звеньям относят:
– пропорциональное звено (П-звено) с ПФ
W (s) = K, (2.15)
где K – коэффициент передачи звена;
– апериодическое звено первого порядка (А-звено) с ПФ
 , (2.16)
, (2.16)
где T – постоянная времени;
– апериодическое звено второго порядка с ПФ
 (2.17)
(2.17)
или
 , (2.18)
, (2.18)
где T 1¸ T 4 – постоянные времени;
– колебательное звено (К-звено) с ПФ
 , (2.19)
, (2.19)
где x – коэффициент демпфирования (затухания), 0 < x < 1.
При x ³ 1 колебательное звено становится А-звеном второго порядка.
К интегрирующим звеньям (И-звено) относят:
– идеальное И-звено с ПФ
 , (2.20)
, (2.20)
или
 ; (2.21)
; (2.21)
– реальное И-звено с ПФ
 ; (2.22)
; (2.22)
– изодромное звено (ПИ-звено) с ПФ
 (2.23)
(2.23)
или
 . (2.24)
. (2.24)
К дифференцирующим звеньям (Д-звено) относят:
– идеальное Д-звено с ПФ
 ; (2.25)
; (2.25)
– реальное Д-звено с ПФ
 . (2.26)
. (2.26)
В таблице 2.1 представлены дифференциальные уравнения и передаточные функции типовых ДЗ.
| Таблица 2.1 – Типовые динамические звенья | |||
| Наименование звена | Дифференциальное уравнение звена | Передаточная функция звена | Параметры звена |
| П-звено (безинерционное,усилительное) | 
| 
| K |
| А-звено первого порядка (инерционное) | 
| 
| K, T |
| А-звено второго порядка |  при
при 
| 
| 
|
| 
| ||
| К-звено | 
| 
|
|
| 
| K, T, x
( ) )
| |
| И-звено идеальное (астатическое) | 
| 
| K |

| 
| T | |
| И-звено реальное | 
| 
| K, T |
| ПИ-звено (изодромное) | 
| 
| 
|
 где
где 
| 
| ||
| Д-звено идеальное | 
| 
| K |
| Д-звено реальное | 
| 
| K, T |
| Звено запаздывания | 
| 
| K, t |
2.1.2.3 Типовые соединения динамических звеньев
Сложные элементы и САУ состоят из нескольких соединенных между собой звеньев. Наиболее простыми и часто встречающимися (типовыми) соединениями звеньев являются:
– последовательное;
– параллельное;
– встречно-параллельное (охват звена обратной связью).
При последовательном соединении ДЗ (рисунок 2.4) выходная величина каждого из звеньев y 1и y 2, кроме последнего звена, является входной величиной последующего звена.
 |
Эквивалентная передаточная функция последовательно соединенных l звеньев равна произведению ПФ этих звеньев:
 . (2.27)
. (2.27)

При параллельном соединении (рисунок 2.5) на вход всех звеньев поступает одна и та же входная величина x (t), а их выходные величины y 1, y 2и y 3суммируются.
Эквивалентная передаточная функция параллельно соединенных l звеньев равна сумме их ПФ:
 . (2.28)
. (2.28)
Третье типовое соединение (рисунок 2.6), называемое встречно-параллельным, приводит к образованию замкнутой системы и состоит из двух звеньев. Звено с ПФ W п(s) образует прямую цепь (связь) передачи сигналов, а звено с ПФ W ос(s) осуществляет ОС.
 Эквивалентная ПФ встречно-параллельного соединения звеньев определяется по формуле замыкания
Эквивалентная ПФ встречно-параллельного соединения звеньев определяется по формуле замыкания
 . (2.29)
. (2.29)
В выражении (2.29) знак "+" соответствует отрицательной ОС, а знак "–" соответствует положительной ОС.
2.1.2.4 Структурная схема одноконтурной САУ
Алгоритмической структурной схемой САУ называют графическое представление ММ системы в соединении ДЗ, в котором каждой математической операции преобразования сигнала соответствует типовое звено, условно обозначаемое прямоугольником с указанием входных и выходных величин, а так же ПФ этого ДЗ.
Структурная схема типовой одноконтурной САУ показана на рисунке 2.7. На рисунке 2.8 изображена эквивалентная схема типовой САУ.
 |
Очевидно, что эквивалентная схема проще, так как содержит меньше звеньев. Подобного упрощения достигают методом свертки (сущность метода см. п. 2.1.2.6). ПФ звеньев обеих схем связаны согласно (2.27) простейшим образом:

 |
Структурная схема показывает строение САУ, наличие внешних воздействий и точки их приложения, пути распространения воздействий и выходную величину. По существу, структурная схема представляет собой графическую форму ММ САУ, что придает ей наглядность в изображении связей между ДЗ. Это позволяет легко находить по структурной схеме ПФ относительно любых входов и выходов. Для составления структурной схемы САУ необходимо иметь ее функциональную схему (см. п. 1.4) и дифференциальные уравнения или ПФ всех элементов системы.
2.1.2.5 Передаточные функции САУ
Структурная схема любой одноконтурной САР с любым количеством последовательно или параллельно соединенных звеньев, охваченных местными ОС, может быть сведена к типовой структурной схеме, показанной на рисунке 2.8. Основную ПФ, связывающую изображение выходной величины Y (s) с изображением задающего воздействия G (s), обозначают Ф(s):
 , (2.30)
, (2.30)
где  – ПФ части САУ, заключенной между точками приложения воздействий y (t) и g (t);
– ПФ части САУ, заключенной между точками приложения воздействий y (t) и g (t);
 – ПФ разомкнутой системы.
– ПФ разомкнутой системы.
Из ДУ (2.10) следует, что в общем случае основная ПФ есть отношение двух полиномов от s (дробно-рациональная функция от s):
 , (2.31)
, (2.31)
где D (s) – характеристический полином замкнутой САУ (2.8).
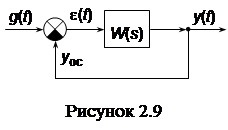
Для следящих систем характерно равенство Wyg (s) = W (s). Структурная схема таких САУ показана на рисунке 2.9, а саму САУ называют системой с единичной ОС.
Основная ПФ названной САУ имеет вид
 . (2.32)
. (2.32)
 Таким образом, основная ПФ Ф(s) определяется по ПФ разомкнутой системы W (s).
Таким образом, основная ПФ Ф(s) определяется по ПФ разомкнутой системы W (s).
Основная ПФ системы Ф(s) характеризует передачу САУ задающего воздействия g (t), его воспроизведение управляемой величиной y (t). Воспроизведение тем лучше, чем ближе Ф(s) к идеальному значению
 ,
,
где K з – коэффициент передачи замкнутой САУ.
ПФ разомкнутой САУ определяют по преобразованной структурной схеме САУ (рисунок 2.10). При этом контур регулирования полагают разомкнутым около сумматора и считают все возмущающие воздействия равными нулю (z = 0). ПФ разомкнутой типовой САУ определяется по формуле (2.27):
 . (2.33)
. (2.33)
 ПФ разомкнутой САУ W (s) характеризует собственные динамические свойства САУ и позволяет определить ее устойчивость, а так же выбрать корректирующее устройство для улучшения свойств САУ.
ПФ разомкнутой САУ W (s) характеризует собственные динамические свойства САУ и позволяет определить ее устойчивость, а так же выбрать корректирующее устройство для улучшения свойств САУ.
В общем случае ПФ разомкнутой САУ представляет собой дробно-рациональную функцию оператора s:
 . (2.34)
. (2.34)
Реальные САУ всегда имеют m < n и коэффициент (свободный член)  . Многочлен A (s) называют характеристическим полиномом разомкнутой САУ, а уравнение A (s) = 0 представляет собой характеристическое уравнение разомкнутой САУ
. Многочлен A (s) называют характеристическим полиномом разомкнутой САУ, а уравнение A (s) = 0 представляет собой характеристическое уравнение разомкнутой САУ
 . (2.35)
. (2.35)
ПФ разомкнутой САУ обычно записывают в стандартной форме, при которой полиномы B (s) и A (s) имеют свободные члены  и
и  , т.е.
, т.е.
 , (2.36)
, (2.36)
где  ,
,
 . (2.37)
. (2.37)
Величину v называют порядком астатизма САУ относительно задающего воздействия g (t).
Статические САУ характеризуются v = 0 и имеют ПФ вида
 . (2.38)
. (2.38)
Астатические САУ характеризуются астатизмом v ¹ 0. В случае v = 1 разомкнутая система имеет ПФ вида
 , (2.39)
, (2.39)
так как свободный член полинома знаменателя A (s) равен нулю (a 0 = 0). Замкнутую САУ при этом называют астатической САУ первого порядка. Такая система содержит в прямой цепи одно И-звено. САУ с двумя И‑звеньями (v = 2) называют астатической САУ второго порядка.
Для определения влияния возмущения z (t) на управляемую величину y (t) структурную схему типовой САУ (рисунок 2.8) следует представить в виде, показанном на рисунке 2.11.
 |
При этом звено с ПФ W 2(s) образует собой прямую цепь, звенья с ПФ W 1(s) и W 3(s) – обратную связь. Тогда в соответствии с (2.29) ПФ замкнутой САУ по возмущению
 , (2.40)
, (2.40)
что позволяет "свернуть" структурную схему САУ (рисунок 2.12) и изобразить САУ звеном с эквивалентной ПФ (2.40).
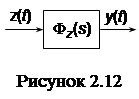 ПФ F z (s) показывает влияние возмущения z (t) на управляемую величину y (t). Возмущение отклоняет её от заданного значения g (t) и уменьшает точность воспроизведения задающего воздействия. Это отрицательное влияние возмущения тем меньше, чем ближе F z (s) к идеальному значению F z (s) = 0.
ПФ F z (s) показывает влияние возмущения z (t) на управляемую величину y (t). Возмущение отклоняет её от заданного значения g (t) и уменьшает точность воспроизведения задающего воздействия. Это отрицательное влияние возмущения тем меньше, чем ближе F z (s) к идеальному значению F z (s) = 0.
При одновременном приложении к линейной САУ управляющего g (t) и возмущающего z (t) воздействий в соответствии с принципом наложения изображение регулируемой величины определяется следующим образом:
Y (s) = Ф(s) G (s) + Ф z (s) Z (s).
При исследовании САУ часто интересуются значением ошибки регулирования (1.1):
 . (2.40)
. (2.40)
ПФ замкнутой САУ по ошибке определяется по следующей формуле:
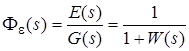 . (2.41)
. (2.41)
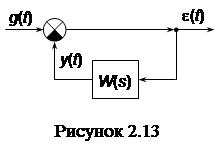 Структурная схема системы с ПФ Fe(s) вида (2.41) показана на рисунке 2.13. При этом считают, все внешние воздействия z (t) = 0, исключая задающее воздействие g (t).
Структурная схема системы с ПФ Fe(s) вида (2.41) показана на рисунке 2.13. При этом считают, все внешние воздействия z (t) = 0, исключая задающее воздействие g (t).
Передаточная функция Fe(s), как и F(s), характеризует воспроизведение управляемой величиной y (t) задающего воздействия g (t) (отработку задания). Воспроизведение тем лучше, чем ближе Fe(s) к идеальному значению Fe(s) = 0.
ПФ САУ по ошибке (2.41) позволяет рассчитать значение статической ошибки системы по следующей формуле:
 , (2.42)
, (2.42)
 .
.
Часто статическую ошибку  принимают за оценку точности статической САУ.
принимают за оценку точности статической САУ.
2.1.2.6 Эквивалентные преобразования структурных схем
Структурную схему любой сложности путем последовательных преобразований можно привести к эквивалентной одноконтурной (рисунок 2.14). Условием эквивалентности является сохранение в процессе преобразований зависимости основных величин y (t), e(t) и y ос(t) от внешних воздействий z (t).
 |
Эквивалентные преобразования структурных схем осуществляют по соответствующим правилам в следующей последовательности. Прежде всего каждое имеющееся в схеме типовое соединение звенев заменяют эквивалентным звеном. Затем целесообразно выполнить перенос точек разветвления (узлов) в соответствии с рисунком 2.15 и сумматоров в соответствии с рисунком 2.16, чтобы в преобразованной таким образом схеме образовались новые типовые соединения звеньев. Эти соединения опять должны быть заменены эквивалентными звеньями. Узел может быть перенесен назад через звено W 1(s) или вперед через звено W 2(s). В первом случае в ответвление включают звено с ПФ W 1(s), во втором – звено с ПФ 1/ W 2(s). Подобным образом поступают при переносе сумматора.
 | |||
 |
Таким образом, указанные правила позволяют преобразовать сложные структурные схемы многоконтурных САУ с перекрещивающимися связями, а также с несколькими входами и выходами. Преобразование структурных схем позволяет определить ПФ САУ любой сложности.
2.1.3 Типовые воздействия
Работа многих САУ сопровождается резкими изменениями внешних воздействий (например, уменьшением или увеличением нагрузки и т.п.). Важно оценить поведение САУ в таких ситуациях, т.е. выяснить, насколько значительным будет отклонение от нормального режима работы и насколько быстро и точно оно будет устранено регулятором. Для того, чтобы сравнить поведение при этом различных САУ и элементов, рассматривают строго определенное, нормированное, изменение воздействий. Таким типовым изменением воздействия считают мгновенное его изменение от нуля до единицы. Для математической записи используют единичную ступенчатую функцию (функцию Хевисайда):
 (2.43)
(2.43)
график которой показан на рисунке 2.17.
 Другим часто встречающимся изменением внешних воздействий являются их кратковременные, но значимые всплески, импульсы. Например, ударная нагрузка на двигатель, порывы ветра, действующие на летательный аппарат и т.п. Нормированным (стандартным) импульсным воздействием считают единичный импульс, т.е. импульс, произведение длительности которого на его амплитуду равно единице.
Другим часто встречающимся изменением внешних воздействий являются их кратковременные, но значимые всплески, импульсы. Например, ударная нагрузка на двигатель, порывы ветра, действующие на летательный аппарат и т.п. Нормированным (стандартным) импульсным воздействием считают единичный импульс, т.е. импульс, произведение длительности которого на его амплитуду равно единице.
Предел, к которому стремится единичный импульс, когда его продолжительность стремится к нулю T ® 0, есть единичная импульсная функция (d-функция или функция Дирака):
 (2.44)
(2.44)
Приблизительно d-функцию можно представить как очень узкий прямоугольный импульс длительности T и амплитуды  около начала координат (рисунок 2.18), так что его площадь (интеграл) равна единице:
около начала координат (рисунок 2.18), так что его площадь (интеграл) равна единице:
 .
.
Это равенство описывает основное свойство d-функции. Кроме того, считают, что d-функция равна первой производной единичной ступенчатой функции
 .
.
Рассмотренные воздействия относят к динамическим, так как с их помощью анализируют динамические свойства САУ (см. п. 2.14).
Свойства элементов и САУ оценивают также в установившихся режимах. Для этого к системе или элементу прикладывают периодическое воздействие. Наиболее часто используют гармоническое воздействие вида
x (t) = Xm sinw t.
Такой выбор обусловлен тем, что любое реальное периодическое воздействие может быть представлено рядом гармонических составляющих (рядом Фурье):
 .
.
Реакцию линейной САУ на реальное воздействие определяют методом наложения (суперпозиции).
2.1.4 ВременнÏе характеристики динамических звеньев и САУ
К временнÏм (динамическим) характеристикам САР относят переходную и импульсную характеристики.
Переходной характеристикой (функцией) h (t) называют функцию, описывающую аналитически или графически изменение выходной величины звена или САУ y (t), вызванное единичным ступенчатым воздействием x (t) = 1(t) на входе звена или САУ при нулевых начальных условиях. Другими словами h (t) есть реакция звена или САУ на единичное ступенчатое воздействие при нулевых начальных условиях. Переходные характеристики и функции типовых ДЗ представлены в таблице 2.2.
Импульсной характеристикой (функцией) или весовой характеристикой звена или САУ w (t) называют характеристику, описывающую реакцию ДЗ или САУ на единичное импульсное воздействие на входе звена или САУ при нулевых начальных условиях. Импульсные характеристики и функции типовых ДЗ представлены в таблице 2.3.
Переходная и импульсная характеристики связаны между собой соотношением

и наоборот
 .
.
Таким образом, весовая функция w (t) представляет собой скорость изменения переходной функции h (t).
Функции 1(t) и  называют типовыми (стандартными) воздействиями.
называют типовыми (стандартными) воздействиями.
Переходная функция ДЗ или САУ связана с его ПФ интегральным преобразованием Карсона
 . (2.45)
. (2.45)
Весовая функция w (t) ДЗ или САУ связана с его ПФ преобразованием Лапласа
 , (2.46)
, (2.46)
т.е. ПФ есть изображение Лапласа весовой функции
W (s) = L [ w (t)]. (2.47)
Наоборот, весовая функция w (t) есть оригинал ПФ W (s) и определяется по формуле обратного преобразования Лапласа
 . (2.48)
. (2.48)
| Таблица 2.2 – Переходные характеристики и функции типовых ДЗ | ||
| Тип звена | Переходная характеристика звена | Переходная функция звена |
| П-звено | 
| h (t) = K |
| А-звено первого порядка | 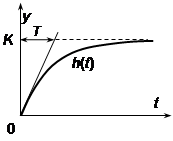
| 
|
| А-звено второго порядка | 
| 
|
| К-звено | 
| 
|
| И-звено идеальное | 
| h (t) = Kt |
| Продолжение таблицы 2.2 | ||
| Тип звена | Переходная характеристика звена | Переходная функция звена |
| И-звено реальное | 
| 
|
| ПИ-звено | 
| h (t) = K 1 t + K 2 |
| Д-звено идеальное | 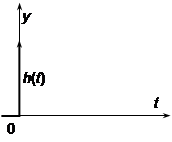
| h (t) = K d(t) |
| Д-звено реальное | 
| 
|
| Звено запаздывания | 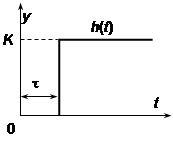
| h (t) = K 1(t - t) |
| Таблица 2.3 – Импульсные характеристики и функции типовых ДЗ | ||
| Тип звена | Импульсная характеристика звена | Импульсная функция звена |
| П-звено | 
| w (t) = K d(t) |
| А-звено первого порядка | 
| 
|
| А-звено второго порядка | 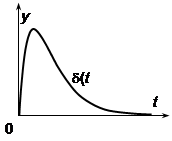
| 
|
| К-звено | 
| 
|
| И-звено идеальное | 
| w (t) = K |
| Продолжение таблицы 2.3 | ||
| Тип звена | Импульсная характеристика звена | Импульсная функция звена |
| И-звено реальное | 
| 
|
| ПИ-звено | 
| w (t) = K 1+ K 2d(t) |
| Д-звено идеальное | 
| 
|
| Д-звено реальное | 
| 
|
| Звено запаздывания | 
| w (t) = K d(t - t) |
Аналогично определяют переходную характеристику
 . (2.49)
. (2.49)
2.1.5 Частотные характеристики
В тех случаях, когда протекающие процессы в САУ изучены слабо, и вывод ДУ, описывающих эти САУ, затруднен, в основу математического моделирования кладут не уравнения движения, а так называемые частотные характеристики (ЧХ) систем.
2.1.5.1 Частотные характеристики динамических звеньев
Если на вход стационарного ДЗ (рисунок 2.1) действует гармонический сигнал
 , (2.50)
, (2.50)
то на выходе ДЗ установится также гармонической сигнал
 (2.51)
(2.51)
той же угловой частоты w, но с измененными амплитудой Ym и начальной фазой y2(рисунок 2.19). Эти изменения зависят как от свойств самого ДЗ, так и от угловой частоты входного воздействия.
Отношение амплитуд выходного и входного сигналов

и разность их фаз
j(w) = y2- y1
являются функциями частоты. Их называют соответственно амплитудно-частотной характеристикой (АЧХ) и фазово-частотной характеристикой (ФЧХ) звена.
 |
Эти характеристики показывают, что линейное ДЗ изменяет амплитуду и фазу гармонического сигнала: в установившемся режиме амплитуда уменьшается или увеличивается в A раз, а фазовый сдвиг уменьшается или увеличивается на j градусов (радиан) при изменении угловой частоты w. Частотные характеристики зависят от свойств ДЗ, но не зависят от амплитуды и фазы входного воздействия. АЧХ может служить для оценки фильтрующих свойств, а ФЧХ – инерционных свойств ДЗ.
Частотные характеристики всякого элемента САУ связаны с его ПФ W (s). Подставляя в выражение ПФ вместо оператора Лапласа s мнимую величину j w, получают комплексную функцию частоты W (j w), которую называют частотной передаточной функцией. Эта функция при любой частоте w является комплексной величиной и поэтому может быть представлена в показательном виде
 , (2.52)
, (2.52)
где A (w); j(w) – соответственно модуль и аргумент частотной ПФ,
 , (2.53)
, (2.53)
 . (2.54)
. (2.54)
Следовательно, модуль и аргумент частотной ПФ определяют соответственно АЧХ и ФЧХ звена.
Частотная ПФ, как комплексная функция, может быть также представлена и в алгебраическом виде
 , (2.55)
, (2.55)
где U (w); V (w) – функции частоты, называемые соответственно вещественной (действительной) и мнимой ЧХ.
Они не имеют конкретного физического смысла, но используются в расчетах и определяются по формулам:
U (w) = Re W (j w); (2.56)
V (w) = Im W (j w). (2.57)
Частотные характеристики связаны между собой известными соотношениями (рисунок 2.20):
 (2.58)
(2.58)
и
 (2.59)
(2.59)

Если частотная ПФ задана в алгебраическом виде (2.55), преобразование ее к показательному виду (2.52) осуществляют по формулам (2.58). Соотношения (2.59) позволяют осуществить при необходимости обратное преобразование.
Кроме аналитического описания ЧХ изображают графически в декартовых координатах. Построение АЧХ и ФЧХ осуществляют по формулам (2.53) и (2.54). На рисунках 2.21 и 2.22 изображены в самом общем виде соответственно АЧХ и ФЧХ обыкновенных инерционных ДЗ или САУ. В таблице 2.4 приведены АЧХ и ФЧХ типовых ДЗ.
 К обычным ЧХ относят амплитудно-фазовую частотную характеристику (АФЧХ). АФЧХ представляет собой годограф частотной ПФ W (j w), т.е. геометрическое место концов вектора W (j w) при изменении частоты w от 0 до ±¥. Эту характеристику строят на комплексной плоскости в полярных (A, w) или декартовых (U, V) координатах конца вектора W (j w) по формулам (2.52), (2.53) или (2.55), (2.56).
К обычным ЧХ относят амплитудно-фазовую частотную характеристику (АФЧХ). АФЧХ представляет собой годограф частотной ПФ W (j w), т.е. геометрическое место концов вектора W (j w) при изменении частоты w от 0 до ±¥. Эту характеристику строят на комплексной плоскости в полярных (A, w) или декартовых (U, V) координатах конца вектора W (j w) по формулам (2.52), (2.53) или (2.55), (2.56).
Типичный годограф W (j w) обыкновенного инерционного ДЗ показан на рисунке 2.20 в диапазоне частот -¥ < w < +¥. Рабочая ветвь годографа соответствует физически реализуемым положительным частотам w ³ 0. Фазовые углы j(w) отсчитывают от положительной действительной полуоси (+1) против движения часовой стрелки. Инерционные звенья характеризуются отрицательными фазовыми углами j(w) < 0. АФЧХ (годографы) типовых ДЗ приведены в таблице 2.4
2.1.5.2 Логарифмические частотные характеристики
Логарифмические амплитудно-частотная (ЛАЧХ) и фазово-частотная (ЛФЧХ) характеристики удобны тем, что небольшим графиком может быть охвачен широкий диапазон частот. При этом одинаково наглядно изменение частотных свойств как на малых, так на средних и высоких частотах.
Небольшим графиком охватывается и широкий диапазон изменения амплитуды при одинаковой наглядности изменения больших и малых амплитуд.
| Таблица 2.4 – Частотные характеристики типовых ДЗ |
| Продолжение таблицы 2.4 |
| Продолжение таблицы 2.4 |
В качестве примера на рисунках 2.23 и 2.24 показаны АЧХ одного и того же А-звена первого порядка (k = 1 и T = 10) в диапазонах частот, отличающихся только на один порядок. По второму графику практически не возможно судить о свойствах исследуемого ДЗ в области малых частот w < 0,4.
 |
Для сравнения на рисунке 2.25 изображена ЛАЧХ указанного А-звена в диапазоне частот 0 < w < 4. Очевидно, что ЧХ, построенная в логарифмических координатах, точно передает характер исследуемой зависимости на всех частотах. Кроме того, значительные непрямолинейные участки ЛАЧХ с большой точностью могут быть заменены прямыми линиями – асимптотами. В этом случае ЛАЧХ изображают отрезками прямых (асимптот) и называют асимптотической или приближенной ЛАЧХ (рисунок 2.26).
Асимптоты имеют отрицательный и положительный наклон, кратный 20 дБ на декаду. Для построения асимптотической ЛАЧХ проводят простые вычисления, так как любую асимптоту можно построить по двум точкам. При построении ЛАЧХ (рисунок 2.25) по оси абсцисс откладывают частоту в логарифмическом масштабе, т.е. наносят отметки, соответствующие lgW, где  – относительная частота. Однако около этих отметок указывают частоты w. Отрезок оси абсцисс, соответствующий изменению частоты в 10 раз, называют декадой (
– относительная частота. Однако около этих отметок указывают частоты w. Отрезок оси абсцисс, соответствующий изменению частоты в 10 раз, называют декадой ( ), а отрезок, соответствующий изменению частоты в два раза, – октавой (
), а отрезок, соответствующий изменению частоты в два раза, – октавой ( ). Декада и октава – равномерные единицы на оси абсцисс. Нуль оси обсцисс лежит слева в бесконечности, так как lg0 = -¥. Поэтому при построении ЛАЧХ выбирают такой отрезок оси абсцисс, который охватывает требуемый диапазон частот (w1, w2), например, полосу пропускания (0, wп). В качестве "базовой" частоты w2удобно в этом случае принять частоту среза, т.е. w2 = wср(рисунок 2.21). По оси ординат ЛАЧХ откладывают в равномерном масштабе в децибеллах (дБ) логарифмическую амплитуду
). Декада и октава – равномерные единицы на оси абсцисс. Нуль оси обсцисс лежит слева в бесконечности, так как lg0 = -¥. Поэтому при построении ЛАЧХ выбирают такой отрезок оси абсцисс, который охватывает требуемый диапазон частот (w1, w2), например, полосу пропускания (0, wп). В качестве "базовой" частоты w2удобно в этом случае принять частоту среза, т.е. w2 = wср(рисунок 2.21). По оси ординат ЛАЧХ откладывают в равномерном масштабе в децибеллах (дБ) логарифмическую амплитуду
L (w) = 20lg A (w). (2.60)
 |
Децибелл является единицей логарифмической относительной величины. Изменение отношения двух амплитуд в 10 раз ( ) соответствует изменению усиления на 20 дБ (см. таблицу 2.5).
) соответствует изменению усиления на 20 дБ (см. таблицу 2.5).
| Таблица 2.5 | ||||||||||
| A (w) | 0,01 | 0,10 | 1,0 | 1,12 | 1,26 | 1,41 | 1,80 | 3,60 | ||
| L (w), дБ | - 40 | - 20 |
ЛФЧХ имеет такую же ось абсцисс, что и ЛАЧХ. По оси ординат ЛФЧХ откладывают в равномерном масштабе угол фазового сдвига j. Оси абсцисс ЛФЧХ и ЛАЧХ обычно совмещают, чтобы изменения фазы можно было сопоставлять с изменениями амплитуды.
Точные и приближенные (асимптотические) ЛАЧХ типовых ДЗ приведены в таблице 2.6.
| Таблица 2.6 – Логарифмические частотные характеристики типовых ДЗ | ||
| Тип звена | Логарифмическая частотная характеристика звена | Асимптотическая ЛАЧХ звена |
| П-звено | 
| 
|
| А-звено первого порядка | 
| 
|
| А-звено второго порядка | 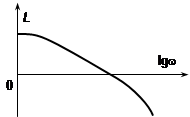
| 
|
| К-звено | 
| 
|
| И-звено идеальное | 
| 
|
| Продолжение таблицы 2.6 | ||
| Тип звена | Логарифмическая частотная характеристика звена | Асимптотическая ЛАЧХ звена |
| И-звено реальное | 
| 
|
| ПИ-звено | 
| 
|
| Д-звено идеальное | 
| 
|
| Д-звено реальное | 
| 
|
В англоязычной технической литературе и современных математических системах (MATLAB, Maple и др.) ЛАЧХ и ЛФЧХ называют диаграммами Боде (Bode diagramms).

