




1.3.1 САР температуры
На рисунке 1.4 показана схема электрической цепи, позволяющая вручную поддерживать заданное значение температуры J (регулировать температуру) в электрической печи. Оператор в зависимости от показаний термометра включает и выключает нагреватель EK выключателем SA.
 |  | ||||
|
Рассмотренная система является разомкнутой, так как выходная величина, температура J, не оказывает никакого влияния на входное воздействие системы – напряжение нагревателя U. Другими словами, в системе ручного регулирования температуры температура внутри печи не оказывает без вмешательства оператора никакого влияния на положение выключателя SA (вкл. или откл.). Состояние на входе системы приводится в соответствие с состоянием ее на выходе действиями оператора. Таким образом, оператор замыкает систему регулирования. Следовательно, для того, чтобы полностью автоматизировать процесс регулирования, необходимо систему сделать замкнутой без оператора.
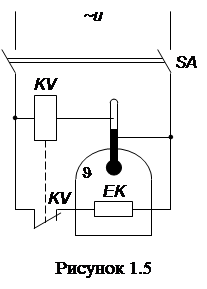
Для достижения названной цели необходимо коммутировать цепь автоматически в зависимости от температуры J. Схема простейшей цепи, удовлетворяющей названным требованиям, показана на рисунке 1.5. Объект регулирования температуры (печь) и силовая цепь, состоящая из источника питания, сетевого выключателя SA и электронагревателя EK, выполняют прежние функции. Для измерения температуры J применяется технический ртутный термометр с контактами типа ТРК. Верхним подвижным контактом устанавливают заданное значение температуры Jзад. При достижении температурой этого значения столбик ртути замыкает собой оба контакта в цепи обмотки реле KV, которое срабатывает и размыкает свой контакт KV в цепи нагревателя ЕК. Печь начинает остывать. При понижении температуры контакты термометра размыкаются и разрывают цепь обмотки реле. До этого разомкнутый контакт реле замыкается и снова подключает электронагреватель к источнику питания. Печь начинает нагреваться. Сетевой выключатель SA остается в процессе работы все время включенным. Таким образом, заданная температура в печи поддерживается автоматически, т.е. без участия оператора. Такое устройство называют системой автоматического регулирования (САР) температуры. Кроме задающего воздействия, к САР приложены возмущающие воздействия, стремящиеся нарушить требуемую функциональную связь между задающим воздействием и регулируемой величиной J. Самыми существенными из них являются колебания напряжения источника питания, изменения температуры окружающей среды, загрузка и разгрузка печи.
 Основным достоинством рассмотренной САР считают ее простоту. К недостаткам этой системы относят непрерывные скачкообразные колебания регулируемой величины около заданного значения даже при отсутствии названных возмущающих воздействий (кривая 1 на рисунке 1.6).
Основным достоинством рассмотренной САР считают ее простоту. К недостаткам этой системы относят непрерывные скачкообразные колебания регулируемой величины около заданного значения даже при отсутствии названных возмущающих воздействий (кривая 1 на рисунке 1.6).
Для сравнения на этом рисунке пунктиром показана экспоненциальная кривая 2 изменения температуры печи J(t) при отсутствии системы регулирования температуры.
Главного недостатка простейшей САР температуры лишена САР, схема которой изображена на рисунке 1.7.
 |
Как видно из сравнения схем на рисунках 1.5 и 1.7, прежний ОУ оборудован иным УУ, состоящим из измерительного моста, усилителя А, двигателя М и автотрансформатора АТ, а также источников питания печи и моста (на схеме не показаны). Ключевое место в САР занимает мост. Режим моста определяет состояние системы. Если мост уравновешен, САР находится в равновесном состоянии. В этом режиме температура печи J равна заданной Jзад, т.е. J = Jзад. УУ обеспечивает такое поступление энергии к ОУ, которое полностью компенсирует рассеивание энергии объектом. В противном случае избыток энергии приводит к росту температуры печи J, а недостаток – к уменьшению температуры. Измерение температуры и преобразование ее в электрическое сопротивление осуществляет термопреобразователь сопротивления R т, включенный в одно из плеч моста. Противоположное ему плечо образовано резистором R 3 с изменяемым сопротивлением. Этот резистор выполняет функции задатчика температуры Jзад. При температуре печи, равной заданной J = Jзад, измерительный мост уравновешен (сбалансирован). Только этот режим моста характеризуется балансом сопротивлений R т R 3 = R 2 R 4и равенством выходного напряжения моста (напряжения измерительной диагонали) U м = 0. Следовательно, на вход усилителя А никакого сигнала не поступает, двигатель М неподвижен, движок автотрансформатора АТ находится в таком положении, которое обеспечивает напряжение U нагревателя ЕК, соответствующее равновесному режиму САР. При отклонении температуры J от заданного значения (например, в результате самопроизвольного изменения напряжения сети ~ u) изменится сопротивление R ттермопреобразователя сопротивления и равновесие моста нарушится (U м ¹ 0). На входе усилителя появится напряжение U м, полярность которого зависит от знака отклонения температуры от заданной. Напряжение разбаланса моста, усиленное усилителем А, прикладывается к двигателю, который начинает вращаться и перемещать движок автотрансформатора АТ в нужном направлении. По достижении заданной температуры мост уравновесится и двигатель остановится. В установившемся режиме и при отсутствии новых возмущений к нагревателю поступает столько электрической энергии, сколько ее необходимо для поддержания заданной температуры. Изменение задающего воздействия подобно возмущению вызывает в САР динамический (переходный) режим, заключающийся в изменении температуры от начального J0до заданного (конечного) значения Jзад(рисунок 1.8).
 Никогда переходный процесс не совершается мгновенно. В силу тепловой инерции печи ее температура изменяется медленно. Процесс установления нового заданного значения может сопровождаться колебаниями температуры около этого значения Jзад. В отличие от простейшей САР названные колебания температуры с течением времени затухают, т.е. их амплитуда уменьшается. По точности достижения заданного значения различают астатические и статические САР. Кривые 1 и 2 на рисунке 1.8 изображают переходные процессы, вызванные управляющим воздействием, в астатической и статической САР соответственно. Установившийся режим астатической системы характеризуется отсутствием ошибки регулирования
Никогда переходный процесс не совершается мгновенно. В силу тепловой инерции печи ее температура изменяется медленно. Процесс установления нового заданного значения может сопровождаться колебаниями температуры около этого значения Jзад. В отличие от простейшей САР названные колебания температуры с течением времени затухают, т.е. их амплитуда уменьшается. По точности достижения заданного значения различают астатические и статические САР. Кривые 1 и 2 на рисунке 1.8 изображают переходные процессы, вызванные управляющим воздействием, в астатической и статической САР соответственно. Установившийся режим астатической системы характеризуется отсутствием ошибки регулирования  , см. формулу (1.1), где g (t) = Jзади y (t) = Jзад. Напротив, статическая САР не может обеспечить такой точности и характеризуется некоторой ошибкой регулирования
, см. формулу (1.1), где g (t) = Jзади y (t) = Jзад. Напротив, статическая САР не может обеспечить такой точности и характеризуется некоторой ошибкой регулирования  . Эту величину иногда называют статизмом САР.
. Эту величину иногда называют статизмом САР.
1.3.2 САР угловой скорости ДПТ
Система состоит из двигателя постоянного тока (ДПТ) с независимым возбуждением М, вращающего шпиндель Ш металлорежущего станка, например (рисунок 1.9). ДПТ и шпиндель образуют ОР. Регулируемой величиной является угловая скорость якоря ДПТ w. Вал ДПТ механически связан со шпинделем и тахогенератором GS, который служит преобразователем угловой скорости якоря w в электрическое напряжение u тг. Обмотка якоря ДПТ подключена к усилителю А. Ко входу усилителя приложено напряжение u e = ug – u тг, где ug – задающее напряжение, u тг– напряжение тахогенератора. Задающее напряжение ug снимается с потенциометра R, т.е. потенциометр является задатчиком угловой скорости якоря ДПТ w. Напряжение u тгснимается с тахогенератора – датчика регулируемой величины w. Знак этого напряжения зависит от направления вращения якоря ДПТ, а величина u тгпропорциональна угловой скорости w. Тахогенератор осуществляет ОС в системе.
 |
Знак и величина задающего напряжения ug определяют направление вращения якоря и значение его угловой скорости w. Стабилизация (регулирование) w осуществляется следующим образом. Если в какой-то момент времени увеличился момент сопротивления вращению якоря М с(например, при резании металла), то угловая скорость w уменьшится. Вследствие этого уменьшится напряжение тахогенератора u тги увеличится напряжение u e– возникает сигнал рассогласования D U. Возрастет напряжение на выходе усилителя, приложенное к обмотке якоря ДПТ. В результате увеличится ток якоря i aи вращающий момент двигателя М а, что восстановит угловую скорость w.
Аналогичные процессы регулирования (стабилизации) происходят в САР при уменьшении момента сопротивления М с, а также при изменении задающего воздействия (положения движка реостата R). В последнем случае угловая скорость w устанавливается на новом уровне, соответствующем заданию.

