




Диапазон регулирования – это отношение возможных установившихся скоростей D=wmax/wmin.
На сегодняшний день сформировалось два основных класса систем векторного управления — бездатчиковые системы (без датчика скорости на валу двигателя) и системы с обратной связью по скорости. Применение того или иного метода векторного управления определяется областью применения электропривода. При небольших диапазонах изменения скорости (не более 1:100) и требованиях к точности ее поддержания не более ±0,5% применяют бездатчиковое векторное управление. Если же скорость вращения вала изменяется в широких пределах (до 1:10000 и более), имеются требования к высокой точности поддержания скорости вращения (до ±0,02% при частотах вращения менее 1 Гц) или есть необходимость позиционирования вала, а также при необходимости регулирования момента на валу двигателя на очень низких частотах вращения, применяют методы векторного управления с обратной связью по скорости.
52 Как по каталожным данным АД определить sкр?
Номинальный момент на валу двигателя

Критический момент
Мк = kм х Мн = 1,8 х 139,3 = 250,7 Н•м.
Критическое скольжение находим подставив М = Мн, s = sн и Мк / Мн = kм.

кратность максимального момента kм (перегрузочная способность)
53 Как по каталожным данным ДПТ можно определить сопротивление цепи якоря?
сопротивление якоря. Его можно найти в каталоге, либо непосредственным измерением. Если же ни то ни другое невозможно, для определения сопротивления  используем приближенную формулу. Сопротивление якоря находят из предположения, что половина всех потерь в двигателе приходится на долю якоря.
используем приближенную формулу. Сопротивление якоря находят из предположения, что половина всех потерь в двигателе приходится на долю якоря.  Где
Где  условное сопротивление, которое нужно включить в якорную цепь, чтобы при неподвижном якоре получить номинальный ток.
условное сопротивление, которое нужно включить в якорную цепь, чтобы при неподвижном якоре получить номинальный ток.
54 Как по каталожным данным можно построить механическую характеристику ДПТ независимого возбуждения?
На практике широко используют приближенное аналитическое выражение механической характеристики с использованием данных, приведенных в каталогах на электродвигатели: кратность моментов МКР к МН и номинальное скольжение sH (при отсутствии величин сопротивлений). Для расчета кривой M = f (s) формулу Клосса (4.22) используют в следующем порядке: 1) по каталожным данным МН, MKP MH и sH определяют sKP; 2) зная отношение  и SKP, задаются значениями s от 1 до 0 и по формуле (4.22) определяют момент в относительных единицах.
и SKP, задаются значениями s от 1 до 0 и по формуле (4.22) определяют момент в относительных единицах.
При известном значении номинального момента можно перевести относительные единицы момента в именованные. В области малых скольжений слагаемые
sKP s и 2 sKP в формуле(4.22) значительно меньше s sKP и ими можно пренебречь. Тогда участкикривых M = f (s) и n = f (M) при малых скольжениях (рис. 4.4) будут
практически прямолинейными: минальной нагрузки) механических характеристик для различных сопротивлений в цепи ротора в виде прямых линий, имеющих больший
наклон при увеличении активного сопротивления ротора. Часто построение кривых моментов ведут по упрощенной формуле Клосса:

Формулы (4.22), (4.24) являются приближенными и дают погрешности, так как не учитывают падение напряжения в обмотках статора. Особенно велика погрешность при переходе из двигательного режима в генераторный. Однако для исследования одного режима выведенные формулы дают приемлемую для большинства расчетов точность.
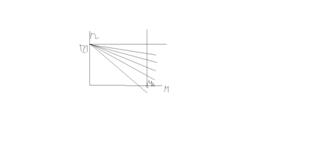
Рис. 4.4. Механические характеристики
при различных сопротивлениях роторной цепи
55 Как по формуле Клосса построить механические характеристики АД?
На практике широко используют приближенное аналитическое выражение механической характеристики с использованием данных, приведенных в каталогах на электродвигатели: кратность моментов  к
к  и номинальное скольжение
и номинальное скольжение  (при отсутствии величин сопротивлений).
(при отсутствии величин сопротивлений).
Для расчета кривой  формулу Клосса используют в следующем порядке:
формулу Клосса используют в следующем порядке:
1) по каталожным данным  и определяют
и определяют  ;
;
2) зная отношение  и , задаются значениями
и , задаются значениями  от 1 до 0 и определяют момент в относительных единицах. При известном значении номинального момента можно перевести относительные единицы момента в именованные.
от 1 до 0 и определяют момент в относительных единицах. При известном значении номинального момента можно перевести относительные единицы момента в именованные.
В области малых скольжений слагаемые  и
и  значительно меньше
значительно меньше  и ими можно пренебречь. Тогда участки кривых и
и ими можно пренебречь. Тогда участки кривых и  при малых скольжениях будут практически прямолинейными:
при малых скольжениях будут практически прямолинейными:
 .
.
На рис. 3.4 построены рабочие участки (от холостого хода до номинальной нагрузки) механических характеристик для различных сопротивлений в цепи ротора в виде прямых линий, имеющих больший наклон при увеличении активного сопротивления ротора. Часто построение кривых моментов ведут по упрощенной формуле Клосса:


56 Как строятся механические характеристики ДПТ последовательного возбуждения?
В ДПТ с последовательным возбуждением поток возбуждения создаётся током якоря машины, для чего обмотка возбуждения и якорь двигателя включаются последовательно относительно источника питания, как показано на схеме рис. 6.13.

Обычно при токах  магнитная цепь машины не насыщена и поток возбуждения пропорционален току возбуждения
магнитная цепь машины не насыщена и поток возбуждения пропорционален току возбуждения  При больших токах якоря Iя>Iяном магнитная цепь машины насыщена, и поток возбуждения можно считать постоянным. Подставив в уравнение
При больших токах якоря Iя>Iяном магнитная цепь машины насыщена, и поток возбуждения можно считать постоянным. Подставив в уравнение  где
где  - сопротивление обмотки возбуждения, значение
- сопротивление обмотки возбуждения, значение  получим
получим  Зная, что
Зная, что  получим
получим  где C1, C2, C3 – постоянные. Поскольку в установившемся режиме Mэм =M, то
где C1, C2, C3 – постоянные. Поскольку в установившемся режиме Mэм =M, то  и уравнение механической характеристики ДПТ с последовательным возбуждением в диапазоне нагрузок M <Mном принимает вид
и уравнение механической характеристики ДПТ с последовательным возбуждением в диапазоне нагрузок M <Mном принимает вид  которому соответствует гиперболическая кривая, приведённая на рис. 6.14.
которому соответствует гиперболическая кривая, приведённая на рис. 6.14.  Способность двигателей последовательного возбуждения развивать большой электромагнитный момент, пропорциональный квадрату тока якоря, обеспечивает этим двигателям хорошие пусковые свойства, т. е. большой пусковой момент при сравнительно малом токе якоря. Поэтому такие двигатели применяют в грузоподъёмных и тяговых приводах. Следует обратить внимание на недопустимость работы электродвигателей с последовательным возбуждением в режиме холостого хода или с нагрузкой менее 25% от номинальной – это приводит к разносу двигателя.
Способность двигателей последовательного возбуждения развивать большой электромагнитный момент, пропорциональный квадрату тока якоря, обеспечивает этим двигателям хорошие пусковые свойства, т. е. большой пусковой момент при сравнительно малом токе якоря. Поэтому такие двигатели применяют в грузоподъёмных и тяговых приводах. Следует обратить внимание на недопустимость работы электродвигателей с последовательным возбуждением в режиме холостого хода или с нагрузкой менее 25% от номинальной – это приводит к разносу двигателя.
Регулирование скорости вращения этих двигателей возможно теми же способами, что и для двигателей с независимым возбуждением.
57. Какая электрическая машина и в каком режиме работает «А».

Механическая характеристика двигателя постоянного тока последовательного возбуждения, в тормозном режиме по способу противовключением. При торможении противовключением в цепь якоря двигателя вводиться дополнительный резистор для ограничения тока.
58 Какая электрическая машина и в каком режиме работает в точке «А»?

Двигатель постоянного тока в режиме рекуперативного торможения
Рекуперативное торможение (генераторный режим) с отдачей энергии в сеть имеет место тогда, когда под влиянием нагрузочного момента или другой причины угловая частота вращения ротора асинхронной машины превысит синхронную частоту ω0. В генераторном режиме скольжение s <0, ток и момент вращения также меняют знак. Режим рекуперативного торможения может быть реализован в системе преобразователь частоты - АД при остановке электродвигателя или при переходе с большей частоты вращения на меньшую. Рекуперативное торможение является наиболее экономичным видом торможения АД.
60 Какая электрическая машина работает в режиме рекуперативного торможения, какие при этом осуществляется преобразования энергии?
У двигателей независимого и параллельного возбуждения 3 режима торможения включая генераторный(рекуперативный)
Если скорость двигателя оказывается выше скорости идеального холостого хода  то ЭДС машины становится больше напряжения сети. Ток якоря, как следует из уравнения
то ЭДС машины становится больше напряжения сети. Ток якоря, как следует из уравнения
 становится отрицательным. Следовательно, меняется и знак момента – он становится тормозным. Машина работает в генераторном режиме: механическая энергия, поступающая со стороны вала машины, преобразуется в электрическую и отдается в сеть.
становится отрицательным. Следовательно, меняется и знак момента – он становится тормозным. Машина работает в генераторном режиме: механическая энергия, поступающая со стороны вала машины, преобразуется в электрическую и отдается в сеть.
Характеристики генераторного режима с отдачей (рекуперацией) энергии являются продолжением характеристик двигательного режима и располагаются во II квадрате.

|
Генераторный режим торможения используется, например, в приводах транспортных и подъемных механизмов при спуске грузов. Способ весьма экономичен, т.к. энергия отдается в сеть.
64 Какое соотношение токов и моментов имеет место при пуске АД переключение co «звезды» на «треугольник»?
Часто двигатель пускают в ход посредством переключения обмотки статора со звезды на треугольник (изо). В момент пуска обмотку статора соединяют звездой, а после того как двигатель разовьет частоту вращения, близкую к нормальной, ее переключают треугольником.
При таком способе пуска двигателя в ход пусковой ток в сети уменьшается в три раза по сравнению с пусковым током, который потреблялся бы двигателем, если бы при пуске обмотка статора была соединена треугольником.
Пуск переключением «звезда — треугольник» может применяться в случаях, когда выведены все шесть концов обмотки статора и двигатель нормально работает с соединением обмотки статора в треугольник, например, когда двигатель на 380/220 ви с соединением обмоток Y/A работает от сети 220 в.В этом случае при пуске обмотка статора включается в звезду (, а при достижении нормальной скорости вращения переключается в треугольник.При таком способе пуска по сравнению с прямым пуском при соединении обмотки в треугольник напряжение фаз обмоток уменьшается, пусковой момент уменьшается, пусковой ток в фазах обмотки уменьшаетс
68 На основании какого закона осуществляется приведение моментов сопротивления в электрическом приводе?
Приведенный момент сопротивления находится на основе закона сохранения энергии или энергетического баланса.

 - коэф. передачи
- коэф. передачи


69 На основании какого закона осуществляется приведение сил сопротивления в электрическом приводе?
Момент сопротивления механизма Мс, возникающий на валу рабочей машины РО, передаётся на вал приводного электродвигателя как момент М'c посредством элементов трансмиссии с передаточным отношением i и коэффициентом полезного действия h п.
Принцип приведения моментов заключается в сохранении равенства мощностей на приводном валу рабочего органа и электрической машины:

откуда
 , (2.2)
, (2.2)
При наличии нескольких передач между двигателем и механизмом с передаточными числами i 1, i 2... in и соответствующими кпд h1, h2 … h m момент сопротивления, приведенный к скорости вала двигателя, определяется формулой:
 , (2.3)
, (2.3)
Приведение сил сопротивления производится аналогично приведению моментов. Если скорость поступательного движения V, м/c, а угловая скорость вала двигателя w д, рад/с, то
 , (2.4)
, (2.4)
где Fсм – сила сопротивления производственного механизма, Н.
70 На основе какого предположения осуществляется приведение моментов инерции в электрическом приводе?
Practi4eski mehani4eskaya harakteristika lubogo proizvodstvennogo mehanizma mozhet bit’ opisana:

Мсо – privedennii moment pri puske;
Мсн – privedennii moment soprotivleniya pri nominal’noi nagruzke;
α – pokazatel’ stepeni;
 – nominal’naya skorost’.
– nominal’naya skorost’.

