




1. Запустить пакет Matlab. В окне управления выбрать «Новая Simulink модель» (рис. П1).
2. Выбрать опцию Simulink. Matlab открывает два окна: окно модели (рис. П2) и окно библиотек элементов (рис. П3).

Рис. П1. Окно управления
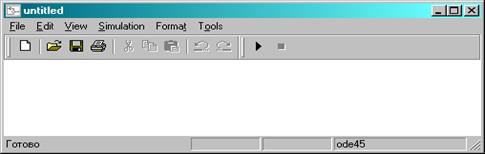
Рис. П2. Окно модели.
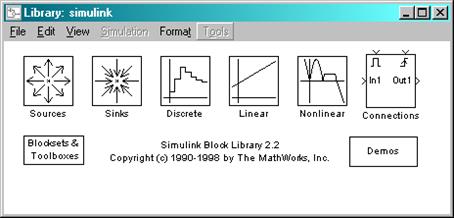
Рис. П3. Окно библиотек элементов
3. Моделируемую САУ необходимо представить в виде набора звеньев, соответствующего структурной схеме системы. Типовые звенья для исследования и моделирования содержатся в библиотеках, разбитых на классы:
– источники входных сигналов Sources (рис. П4);
– средства отображения результатов моделирования Sinks (рис. П5);
– дискретные элементы структурных схем Discrete;
– линейные элементы структурных схем Linear (рис. П6);
– нелинейные элементы структурных схем Nonlinear;
– элементы коммутации Connections.
Каждая библиотека открывается двойным щелчком «мыши» на соответствующей иконке.
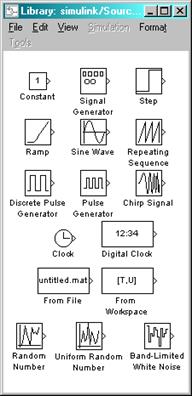

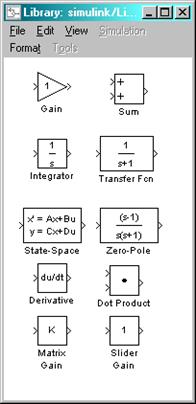
| Рис. П4. Источники входных сигналов | Рис. П5. Средства отображения результатов моделирования | Рис. П6. Линейные элементы структурных схем |
4. Для составления модели необходимо в соответствии со структурной схемой системы набрать из библиотек нужные блоки («взять и перенести» мышкой в окно untitled) и соединить их входы-выходы (рис. П7).
Рис. П7. Модель САУ
5. Запуск моделирования – командой «Старт/Пауза моделирования». Результат моделирования представляется в графическом виде, для чего необходимо дважды щёлкнуть мышкой по значку Scope (рис. П8).


Рис. П8. Результат моделирования Рис. П9. Окно точек входа-выхода
6. Для исследования других характеристик системы (АЧХ, расположение корней и др.) необходимо выполнить линейный анализ модели (меню Tools, пункт Linear Analisys). При этом открываются два окна: окно точек входа-выхода (рис. П9) и окно просмотра результатов анализа «LTI Viewer».
7. Из окна точек входа-выхода необходимо перенести их на вход и выход того элемента или системы в целом, для которых проводится линейный анализ (рис. П10).
8. В окне LTI Viewer в меню Simulink выбрать пункт «Get Linearized Model» (рис. П11).
9. Виды представленных характеристик выбираются из меню «Plot Type»

Рис. П10. Установка точек входа-выхода линейного анализа


Рис. П11. Окно результатов линейного анализа
10. Для копирования результатов моделирования в другие приложения в меню File выбирается пункт «Send Response to Figure». При этом включается программа просмотра рисунка LTI Viewer Responses (рис. П12). Копирование рисунка – пункт «Copy Figure» из меню Edit этого окна. Результат – рис. П13.
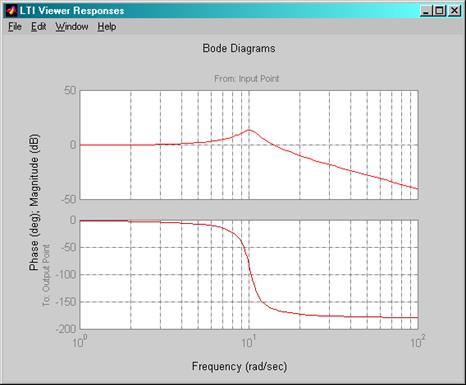
Рис. П12. Просмотр рисунка
Рис. П13. Результат копирования
Библиографический список
1. Бесекерский В.А., Попов Е.П. Синтез систем автоматического регулирования. - М.: Наука, 1972. – 326 с.
2. Сборник задач по теории автоматического управления и регулирования / В.А. Бесекерский, А.Н. Герасимов, С.В. Лучко и др.; Под ред. Е.П. Попова. - М.: Высш. шк., 1978. – 240 с.
3. Попов Е.П. Теория линейных систем автоматического регулирования. – М.: Наука, 1989. – 285 с.
4. Теория автоматического регулирования. Ч.1, 2 / Под ред. А.А. Воронова. - М.: Наука, 1978. – 578 с.
5. Гультяев А. Визуальное моделирование в среде MATLAB: Учебный курс. - СПб: Питер, 2000. – 432 с.

