




Внешний окружной модуль  конических зубчатых колес дифференциалов рекомендуется выбирать по аналогии конструкции дифференциалов современных транспортных машин. Для этих целей используются следующие формулы
конических зубчатых колес дифференциалов рекомендуется выбирать по аналогии конструкции дифференциалов современных транспортных машин. Для этих целей используются следующие формулы
 ;
;
 ; (1)
; (1)
 ;
;
где  эмпирический коэффициент,
эмпирический коэффициент,  ,
,
 число зубьев сателлита,
число зубьев сателлита,
 расчетный момент,
расчетный момент,
 число сателлитов,
число сателлитов,
 ,
,
где  число зубьев полуосевого зубчатого колеса.
число зубьев полуосевого зубчатого колеса.
Отношение  к коническим дифференциалам составляет
к коническим дифференциалам составляет  ,
,  и т.д.
и т.д.
Во всех случаях должно соблюдаться условие сборности
 ,
,
где  целое число.
целое число.
Все зубчатые колеса дифференциала прямозубые. Ширина зубчатого венца
 ,
,
где  внешнее конусное расстояние
внешнее конусное расстояние
 .
.
Параметры исходного контура принимаются по ГОСТ 13754-88. Допускается использовать следующие параметры:  . Коэффициенты смещения
. Коэффициенты смещения  и
и  принимаются равными по модулю, но для сателлита положительный, а для шестерни отрицательный.
принимаются равными по модулю, но для сателлита положительный, а для шестерни отрицательный.
При исходном контуре по ГОСТ принимают:
 , тогда
, тогда  ,
,
при  , тогда
, тогда  .
.
В дифференциалах имеет место блокирование с помощью гидронажимных фрикционных муфт. Если фрикционная муфта блокирует полуось дифференциала, то момент трения муфты
 ,
,
где  расчетный радиус ведущего колеса,
расчетный радиус ведущего колеса,
 КПД конической передачи.
КПД конической передачи.
По формуле (1)
 число зубьев плоского колеса
число зубьев плоского колеса  , а для отв. передач
, а для отв. передач  при 90º. Соответствует контуру зубьев рейки.
при 90º. Соответствует контуру зубьев рейки.
 коэффициент, учитывающий влияние двустороннего приложения нагрузки,
коэффициент, учитывающий влияние двустороннего приложения нагрузки,
 предел выносливости зубьев при изгибе, соответствующий базовому числу циклов напряжения,
предел выносливости зубьев при изгибе, соответствующий базовому числу циклов напряжения,
 коэффициент, учитывающий влияние формы зуба и концентрацию на изгиб,
коэффициент, учитывающий влияние формы зуба и концентрацию на изгиб,
 коэффициент, учитывающий динамическую нагрузку,
коэффициент, учитывающий динамическую нагрузку,
 коэффициент ширины зубчатого венца.
коэффициент ширины зубчатого венца.
Для расчета полуосевых шестерен и сателлитов выбирается наибольший момент по сцеплению ведущих колес с дорожным покрытием.
 ,
,
где  коэффициент сцепления,
коэффициент сцепления,
 нагрузка на ведущее колесо,
нагрузка на ведущее колесо,
 передаточное число,
передаточное число,
 КПД бортовой конической передачи.
КПД бортовой конической передачи.
Момент, действующий на сателлит
 .
.
Крестовина сателлита рассчитывается на срез от окружной силы
 ,
,
где  средний радиус действия окружной силы на крестовину.
средний радиус действия окружной силы на крестовину.
 ,
,
 ,
,
где  средний радиус поверхности контакта сателлита и шипа крестовины относительно оси полуосевых шестерен,
средний радиус поверхности контакта сателлита и шипа крестовины относительно оси полуосевых шестерен,
 диаметр шипа крестовины,
диаметр шипа крестовины,
 длина цилиндрической поверхности сателлита под шип крестовины.
длина цилиндрической поверхности сателлита под шип крестовины.
Вычисляют также напряжение смятия в контакте шипа крестовины с корпусом дифференциала
 ,
,
где  длина цилиндрической поверхности корпуса дифференциала под шип крестовины.
длина цилиндрической поверхности корпуса дифференциала под шип крестовины.
Зубчатые колеса крестовины и сухаря дифференциала изготавливают из высоколегированных сталей, применяемых для изготовления агрегатов трансмиссии, с цементацией на глубину 1,5…1,9 мм и закалкой до HRCэ от 58 до 63 с твердостью сердцевины от 30 до 40. Корпуса дифференциалов отливают из ковкого чугуна 35…10 или стали.
Определяют число зубьев сателлита по следующей формуле
 ,
,
где  передаточное число от сателлита до полуосевой шестерни.
передаточное число от сателлита до полуосевой шестерни.
Обычно принимают в расчетах  , исходя из условия размещения полуосевых шестерен шлицевого конца полуоси нужного диаметра и ограничение размера дифференциала.
, исходя из условия размещения полуосевых шестерен шлицевого конца полуоси нужного диаметра и ограничение размера дифференциала.
В дифференциале сателлитов от 2 до 4.
Полуоси
Полуоси служат для передачи крутящего момента от межосевого дифференциала к ведущим колесам машины и, по сути, являются ведущими валами. При зависимой подвеске колес полуоси располагаются внутри картера и, как правило, соединяются с полуосевыми шестернями дифференциала шлицами, а со ступицами ведущих колес с помощью шлицев или фланцев, составляющих одно целое с полуосями. Все типы полуосей рассчитываются на сопротивление усталости и статическую прочность, принимая в расчете, что балки не деформируются. В расчете принимают следующие действующие на полуось силовые факторы:
– в случае интенсивного разгона или торможения максимальный крутящий момент  и изгибающие моменты действуют по осям
и изгибающие моменты действуют по осям  ;
;
– при заносе машины на повороте учитывают изгибающий момент относительно горизонтальной оси площадки;
– в случае переезда через препятствие учитывается изгибающий момент относительно горизонтальной оси к площадке опасного сечения полуоси.
Учитывают коэффициент динамичности, применяемый для высоконагруженных транспортных средств в пределах от 2 до 2,5, а для транспортных средств высокой проходимости от 2,5 до 3.
При расчете оценок статической прочности полуосей применяются дополнительные напряжения:
 ,
,
s w:ascii="Cambria Math" w:h-ansi="Cambria Math"/><wx:font wx:val="Cambria Math"/><w:i/></w:rPr><m:t>РІ</m:t></m:r></m:sub></m:sSub></m:oMath></m:oMathPara></w:p><w:sectPr wsp:rsidR="00000000"><w:pgSz w:w="12240" w:h="15840"/><w:pgMar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></w:body></w:wordDocument>">  .
.
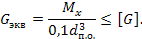
При этом эквивалентное напряжение, которое сравнивается с допускаемым, рассчитывается по следующим формулам
 ,
,
где  диаметр полуоси в опасном сечении.
диаметр полуоси в опасном сечении.
Для полуразгруженных и разгруженных на ¾ полуосей при интенсивном разгоне или торможении

 ,
,
где  изгибающие моменты относительно осей
изгибающие моменты относительно осей  и
и  .
.

При заносе машины на повороте
При переезде препятствия
В существующих конструкциях диаметр полуосей у нагрузочных транспортных средств принимают  мм.
мм.
Планетарные передачи
Основные соотношения планетарных механизмов.
Планетарным механизмом называют механизм, состоящий из зубчатых колес, в котором геометрическая ось хотя бы одного колеса подвижна. Зубчатое колесо с подвижной геометрической осью называется сателлитом. Сателлит может иметь один или несколько зубчатых венцов, либо состоять из находящихся в зацеплении нескольких колес.
Классификация трехзвенных планетарных механизмов
| Схема | Сателлиты | Зацепление | Значение периметра Р | |
| A | 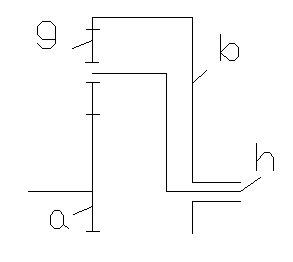
| Одновен-цовые | Разнои-менные |

|
| B | 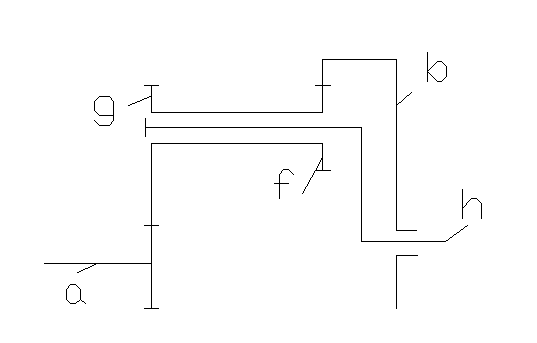
| Двухвенцовые (блочные) | Разнои-менные |

|
| D | 
| Одновен-цовые парные | Разнои-менные центра-льные |

|
Звено, в котором установлены оси сателлитов – водило (h). Зубчатое колесо, геометрическая ось которого совпадает с основной осью механизма – центральное(a,b,k). Основным звеном планетарного механизма называют звено, воспринимающее в нагруженной передаче внешний момент, и является центральным.
a – солнечная шестерня,
h – водило,
g – сателлит,
b – коронная шестерня (эпициклическая).
Планетарный механизм, у которого вращаются все 3 основных звена, называют дифференциалом. Планетарные механизмы обозначают по соответствию имеющихся сателлитов, зацеплений и значений параметров. Планетарные механизмы, в которых основными звеньями являются 2 центральных колеса и водило, обозначается 2k-h. Планетарный редуктор может состоять из одного планетарного механизма или нескольких, соединенных друг с другом. Классификация трехзвенных планетарных механизмов типа 2k-h приведена в классификации трехзвенных планетарных механизмов. Большее распространение в планетарных редукторах имеют трехзвенные планетарные механизмы типа A и D, значительно реже типа B. Кинематические и силовые характеристики трехзвенных планетарных механизмов определяются его кинематическим параметром r wsp:rsidR="00000000"><w:pgSz w:w="12240" w:h="15840"/><w:pgMar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></w:body></w:wordDocument>">  , равным передаточному числу от звена a к звену b при остановленном водиле h.
, равным передаточному числу от звена a к звену b при остановленном водиле h.
 ,
,
где  и
и  угловая скорость и частота вращения звена соответственно.
угловая скорость и частота вращения звена соответственно.
Выражения для определения параметра  с учетом знака указаны в таблице классификации трехзвенных планетарных механизмов. Приведенное уравнение параметра r wsp:rsidR="00000000"><w:pgSz w:w="12240" w:h="15840"/><w:pgMar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></w:body></w:wordDocument>"> известно как формула Виллиса и может быть непосредственно использована для расчета при анализе и синтезе планетарных редукторов, но удобнее использовать ее в преобразованном виде:
с учетом знака указаны в таблице классификации трехзвенных планетарных механизмов. Приведенное уравнение параметра r wsp:rsidR="00000000"><w:pgSz w:w="12240" w:h="15840"/><w:pgMar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></w:body></w:wordDocument>"> известно как формула Виллиса и может быть непосредственно использована для расчета при анализе и синтезе планетарных редукторов, но удобнее использовать ее в преобразованном виде:
 .
.
Это уравнение часто называют основным уравнением кинематики трехзвенного механизма. В ряде случаев используют параметр k  . При этом основное уравнение кинематики принимает следующий вид
. При этом основное уравнение кинематики принимает следующий вид
 .
.
Оценку схем планетарных редукторов производят по следующим показателям. Следует стремиться к тому, чтобы скорости на режиме длительной работы были не более 60 – 65 м/с и кратковременными в части работы элементов трехзвенных планетарных механизмов. Не рекомендуется иметь  ;
;  . Желательно, чтобы значение параметров находилось в пределах 1,7…3. Для любого трехзвенного планетарного механизма имеется внутреннее передаточное число
. Желательно, чтобы значение параметров находилось в пределах 1,7…3. Для любого трехзвенного планетарного механизма имеется внутреннее передаточное число  от солнечной шестерни к коронной при остановленном водиле, которое называется параметром данного планетарного ряда. положительно, если оба элементарных зубчатых зацепления из планетарного ряда имеют одноименные зацепления (внутреннее или внешнее), а отрицательно при разноименных зацеплениях.
от солнечной шестерни к коронной при остановленном водиле, которое называется параметром данного планетарного ряда. положительно, если оба элементарных зубчатых зацепления из планетарного ряда имеют одноименные зацепления (внутреннее или внешнее), а отрицательно при разноименных зацеплениях.
Силовой анализ планетарных редукторов
При силовом анализе планетарных редукторов используют следующие зависимости, пренебрегая силами трения.
 ;
;
 ;
;
 .
.
На основании силового анализа решаются следующие задачи:
1. Определяют моменты на валу тягового электродвигателя, а затем переходят к определению показателей центральной передачи и планетарного редуктора.
2. Равенство момента на ведущем и ведомом валах планетарного механизма.
3. Находят моменты, нагружающие редуктор. Значение момента может быть положительно в результате решения уравнений, отражающих условие равновесия сателлита в зависимости между моментами на звеньях с блокирующим планетарным механизмом.
4. Равенство моментов с блокирующим механизмом.
5. Равенство суммы момента элементов планетарного редуктора, расположенных на его ведущем валу и момента на этом валу.
При проектировании передачи необходимо соблюдать условие сборки и соосности, тогда для передачи с внутренним зацеплением необходимо определить число зубьев солнечной шестерни, как наименьшее в ряду при  (k
(k  и при
и при  определяют наименьшее число зубьев у сателлита.
определяют наименьшее число зубьев у сателлита.
Управляемый мост

