




Лекция 2
Краткое содержание: Простейшие теоремы статики. Система сходящихся сил. Приведение к равнодействующей. Равновесие системы сходящихся сил. Момент силы относительно точки и оси. Момент пары. Теория пар.
Простейшие теоремы статики
Теорема о переносе силы вдоль линии действия.
Действие силы на твердое тело не изменится от переноса силы вдоль своей линии действия.

 если
если 
Но  , а значит
, а значит  ■
■
Таким образом, точка приложения силы в абсолютно твердом теле несущественна. Силу для твердого тела можно считать приложенной в любой точке линии действия. Векторные
величины, которые можно прикладывать в любой точке линии действия, называют скользящими. Сила, приложенная к твердому телу, есть вектор скользящий. В деформируемом теле силу нельзя переносить вдоль линии действия. Сила в этом
случае является приложенным вектором.
Теорема о трех силах. Если твердое находится в равновесии под действием трех сил и линии действия двух из них пересекаются в одной точке, то через эту точку проходит линии действия и третьей силы.
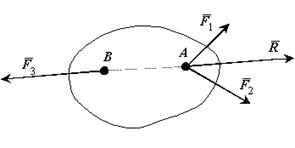

Следовательно,  идут по одной прямой, а это и значит, что линии действия исходных сил пересекаются в точке А. ■
идут по одной прямой, а это и значит, что линии действия исходных сил пересекаются в точке А. ■
Системой сходящихся сил (или пучком сил) называют такую систему сил, линии действия которых пересекаются в одной точке – центре пучка.
Приведение к равнодействующей силе
Рассмотрим общий случай пространственной системы сходящихся сил. Так как сила, действующая на твердое тело, есть вектор скользящий, то можно сразу считать, что силы системы приложены в одной точке — центре пучка.
Применяя к первым двум силам пучка F1 и F2 аксиому параллелограмма, заменим их одной равнодействующей силой R12,равной их векторной сумме, причем приложена R12 снова в центре пучка. Поэтому теперь можно по правилу параллелограмма складывая силы R12 и F3 найти их равнодействующую и т. д. Продолжая процесс векторного сложения для всех
сил, получим

Таким образом, система сходящихся сил эквивалентна одной силе R*, которая и является равнодействующей этой системы сил.
Процесс последовательного применения к силам правила параллелограмма, или их векторного сложения, приводит к построению силового многоугольника из заданных сил.

Равнодействующая системы сходящихся сил равна векторной сумме слагаемых сил и определяется замыкающей стороной силового многоугольника, построенного на слагаемых силах как на составляющих. Точка приложения равнодействующей силы совпадает с точкой пересечения линий действия сил.
Равнодействующая сила R* в силовом многоугольнике соединяет начало первой силы с концом
последней, т. е. изображается замыкающей силового многоугольника, который в общем случае является незамкнутым.
Проекции равнодействующей силы на оси координат равны алгебраической сумме проекций составляющих сил на эти оси.



Условия равновесия системы сходящихся сил в векторной форме
Для равновесия сходящейся системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы равнодействующая сила была равна нулю.

Условия равновесия системы сходящихся сил в алгебраической форме
Для равновесия пространственной системы сходящихся сил, приложенных к твердому телу, необходимо и достаточно, чтобы суммы проекций всех сил на каждую из трех прямоугольных осей координат были равны нулю.



Момент силы относительно точки и оси.
Действие силы на твердое тело, закрепленное в одной точке, заключается в стремлении повернуть его вокруг точки закрепления. Для характеристики вращательного действия силы вводится понятие момента силы относительно центра (или точки).

Моментом силы относительно точки (центра) называется векторное произведение радиус-вектора точки приложения силы на вектор силы.

Вектор момента направлен перпендикулярно плоскости, в которой лежат сила и точка, в ту сторону, откуда поворот от действия силы виден происходящим против хода часовой стрелки. Вектор момента характеризует положение плоскости и направление вращательного действия силы, а также дает меру этого действия:

h — плечо силы (кратчайшее расстояние от центра момента до линии действия силы). Если сила проходит через точку, то ее момент относительно этой точки равен нулю. Если силы расположены в одной плоскости, то используется понятие алгебраического момента силы.
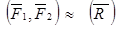
Алгебраическим моментом силы относительно точки называется взятое со знаком плюс или минус произведение модуля силы на плечо. Знак плюс выбирается в том случае, если сила стремится поворачивать плоскость относительно центра момента против хода часовой стрелки.
Для схемы на рисунке: MA(F)=+F ⋅ h1; MA(P)= -P ⋅ h2; MA(Q)=0.
Для характеристики вращательного действия силы на тело, закрепленное на оси, служит
момент силы относительно оси — алгебраическая величина, равная проекции вектора момента силы относительно произвольной точки оси на эту ось:


Способы вычисления момента силы относительно оси
1. Аналитический
По правилу вычисления векторного произведения. Если сила  задана своими проекциями
задана своими проекциями  на оси координат и даны координаты
на оси координат и даны координаты  точки приложения этой силы, то момент силы относительно начала координат вычисляется следующим образом:
точки приложения этой силы, то момент силы относительно начала координат вычисляется следующим образом:

Поэтому проекции момента на оси координат равны, а значит и моменты относительно координатных осей, равны:



2. Геометрический
Провести плоскость π, перпендикулярную данной оси (Oz), спроектировать силу на эту плоскость и вычислить момент проекции  относительно точки О пересечения оси z с плоскостью π.
относительно точки О пересечения оси z с плоскостью π.

Момент положителен, если глядя с положительного направления оси вращение видно происходящим против хода часовой стрелки. Момент силы относительно оси равен нулю, если
сила параллельна оси или линия действия силы пересекает ось.
Теория пар сил
Парой сил называется система двух равных по модулю, параллельных и направленных в противоположные стороны сил.
Плоскостью действия пары сил называется плоскость в которой расположены эти силы.
Плечом пары сил d называется кратчайшее расстояние между линиями действия сил пары.
Моментом пары сил называется вектор  , модуль которого равен произведению модуля одной из сил пары на ее плечо и который направлен перпендикулярно плоскости действия сил пары в ту сторону, откуда пара видна стремящейся повернуть тело против хода часовой стрелки.
, модуль которого равен произведению модуля одной из сил пары на ее плечо и который направлен перпендикулярно плоскости действия сил пары в ту сторону, откуда пара видна стремящейся повернуть тело против хода часовой стрелки. 
 |
Для пар, расположенных в одной плоскости, используется понятие алгебраического момента пары.
Алгебраический момент пары сил равен алгебраическому моменту одной из сил пары относительно точки приложения другой силы или, что то же самое, равен взятому со знаком плюс или минус произведению модуля одной из сил пары на плечо. Момент пары положителен,
если пара стремится повернуть плоскость своего действия против хода часовой стрелки.
Суммарное вращательное действие сил, составляющих пару, определяется следующей теоремой.
Теорема о сумме моментов пары сил. Сумма моментов сил, входящих в состав пары, относительно любой точки не зависит от выбора этой точки и равна моменту этой пары сил.

Доказательство: Выберем произвольно точку О.

Проведем из нее в точки А и В радиус-векторы  ,
, 
 ■
■
Две пары сил называются эквивалентными, если их действие на твердое тело одинаково при прочих равных условиях.
Основные свойства пар (правила их эквивалентного преобразования) даются следующими тремя теоремами:
Теоремы о парах
Теорема 1.
Две пары сил, лежащие в одной плоскости, эквивалентны, если равны их алгебраические моменты.
Следствие:
Пару сил можно перемещать в плоскости действия, изменяя величину плеча и силы, сохраняя ее момент.
Теорема 2.
Пару сил можно переносить в любую плоскость, параллельную плоскости ее действия.
Следствие из теорем 1 и 2:
Две пары сил эквивалентны, если равны их векторные моменты.
(Вектор момента пары — свободный вектор).
Теорема 3.
Две пары, лежащие в пересекающихся плоскостях, эквивалентны одной паре, момент которой равен геометрической сумме моментов составляющих пар.
В частном случае:
Две пары, лежащие в одной плоскости, эквивалентны одной паре, момент которой равен алгебраической сумме моментов составляющих пар.
Из теоремы следует, что любую систему пар можно заменить одной парой, момент которой равен сумме моментов составляющих пар.
Это позволяет получить условие равновесия системы пар.
Условие равновесия системы пар
Для равновесия системы пар, действующих на твердое тело, необходимо и достаточно, чтобы сумма моментов пар равнялась нулю: 