




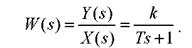
1. Рівняння ланки:

де k - передаточний коефіцієнт, що являє собою відношення вихідної
величини до вхідної у статичному режимі розмірністю [k] = [y] / [x];
T - постійна часу, що характеризує інерційність ланки.
В операторній формі при нульових початкових умовах це рівняння має вигляд

2. Передаточна функція:
4. Частотні характеристики:
Частотна передаточна функція:

Тому

Звідки

На рис. 3.6 подані відповідні графіки.
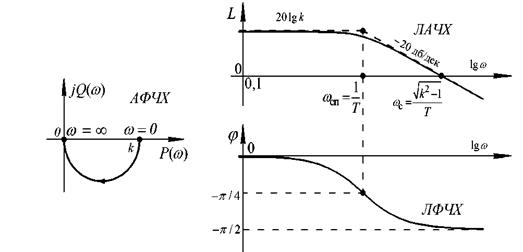
Рис. 3.12 – Частотні характеристики
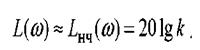
Крива, що точно відповідає функції L(w), показана на рисунку суцільною лінією. У практичних розрахунках звичайно використовують наближену характеристику L*(w), що являє собою ламану, що складається із двох асимптот.
Перша асимптота (низькочастотна) виходить при малих частотах, коли величиною T2w2 вираженні L(w) можна знехтувати. Тоді
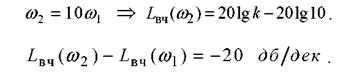
Друга асимптота (високочастотна) виходить при високих частотах,
коли T2w2 >>1 і одиницю під коренем можна не враховувати. Тоді

Останнє рівняння являє собою рівняння прямої, що проходить через точку координатами

Визначимо нахил другої асимптоти:
Значення частоти wсп, при якій перетинаються обидві асимптоти, знайдемо з умови

Тобто

Звідси wсп = 1T
На основі викладеного алгоритм побудови асимптотичної ЛАЧХ можна подати в такий спосіб:
- на рівні L(w) = 20 lg k провести пряму до частоти wсп;
- з точки з координатами [wсп; 20lgk] провести іншу пряму
з нахилом - 20 дб/дек.
Максимальна помилка проведеної апроксимації виходить при w = w сп і становить:

Відзначимо, що при W = Wсп

Отже, з аналізу ЛАЧХ і ЛФЧХ видно, що зі збільшенням частоти вхідних коливань амплітуда вихідних коливань до частоти w сп не змінюється, а при w > wсп - зменшується, тобто ланка є фільтром високих частот.
4. Перехідна характеристика - часові характеристики:
- імпульсна перехідна характеристика
Вигляд цих характеристик представлений на рис. 3.13.
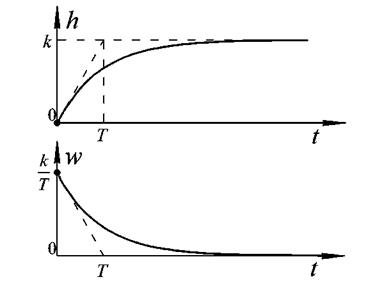
Рис. 3.13 – Часові характеристики: а) h(t); б) w(t)
Форсуюча ланка
1. Рівняння ланки:

де k – передаточний коефіціент, що являє собою відношення вихідної величини до вхідного у стстичному режимі розмірностью [k] = [y] / [x];
Т постійна часу, що характеризує инерційність ланки.
В операторній формі при нульових початкових умовах це рівняння має вигляд:
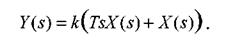
2. Передаточна функція:
3. Частотні характеристики:
Частотна передаточна функція:
Звідки

На рис. 3.14 представлені графіки L, φ (lg ɷ)
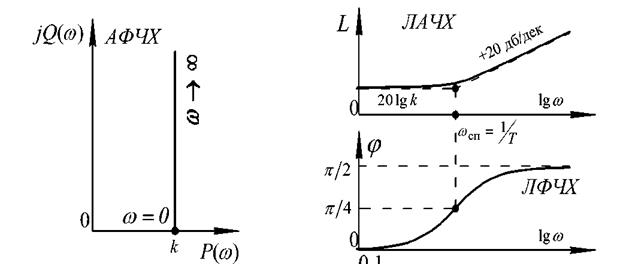
Рис. 3.14 – Частотні характеристики
Крива, що точно відповідає функції L(w), показана на рисунку
пунктирною лінією. Аналогічно аперіодичній ланці заміняємо її наближеною ха-рактеристикою, що являє собою ламану, яка складається із двох асимптот:

Визначимо нахил другої асимптоти:

Частота сполучення також дорівнює
wс = w 1 = 1 T
Максимальна помилка апроксимації виходить при w = wс і становить:

Відзначимо також, що при w = wс:

Таким чином, з аналізу ЛАЧХ і ЛФЧХ видно, що зі збільшенням
частоти вхідних коливань амплітуда вихідних коливань до частоти wс
не змінюється, а при w > wс - збільшується, тобто ланка є підсилювачем високих частот.
Зміщення фаз позитивне і з ростом частоти прагне до значення j (¥) = p2.
4. Часові характеристики:
- перехідна характеристика

- імпульсна перехідна характеристика

Коливальна ланка
1. Рівняння ланки:

де k - передаточний коефіцієнт, що являє собою відношення вихідної величини до вхідного у статичному режимі розмірностю [k] = [y] / [x];
T - постійна часу, що характеризує інерційність ланки; ξ - коефіцієнт демпфірування (загасання), що характеризує коливальність ланки.
В операторній формі при нульових початкових умовах це рівняння має вигляд

Динамічні властивості розглянутої ланки визначаються значенням коефіцієнта ξ. Власне коливальною ланкою воно називається тільки
при 0 < ξ < 1. При ξ = 0 ланка називається консервативною,
а при ξ ³ 1 - аперіодичною другого порядку.
Розглянемо випадок, коли 0 < ξ < 1.
2. Передаточна функція:
3.Частотні характеристики:
Частотна передаточна функція:
На рис. 4.9 подані відповідні графіки
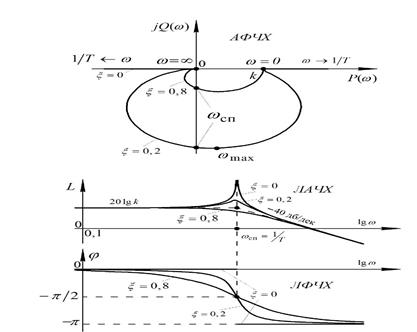
Рис. 3.15 – Частотні характеристики
Вигляд кривої, що точно відповідає функції L (w), істотною мірою залежить від значення коефіцієнта ξ.
Взявши похідну L(w) і дорівнявши її нулю, можна одержати значення частоти w max = 1-2x2T, на якій спостерігається резонансний пік ЛАЧХ, величина якого становить L (w) = 20 lg k - 20 lg 2x 1- x 2. При цьому, якщо ξ>V2/2~0,707 (wmax > 0), ЛАЧХ має вигляд монотонно убутної функції.
Якщо ж ξ ->0, то wmax ~^1 T і L(wmax)^оо.
У практичних розрахунках звичайно використовують наближену характеристику, що являє собою ламану, яка складається з двох асимптот.
При низьких частотах зневажають величинами
 і
і 
тобто

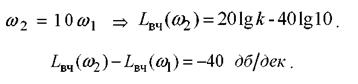
Останнє рівняння являє собою рівняння прямої, що проходить через точку з координатами [w 1 = 1 T; Lвч(w 1) = 20lg k ].
При високих частотах зневажають величинами 1 і (2ξTw)2:

Визначимо нахил другої асимптоти:
Значення частоти wсп, при якій перетинаються обидві асимптоти, знайдемо з умови Lнч(w сп) = Lвч(w сп), тобто

Звідси wсп = 1 T.
На основі викладеного алгоритм побудови асимптотичної ЛАЧХ
можна подати в такий спосіб:
- на рівні L(w) = 20 lg k провести пряму до частоти wсп;
- з точки з координатами [wсп; 20 lg k] провести іншу пряму
з нахилом - 40 дб/дек.
ЛФЧХ будуємо за точками:

Таким чином, з аналізу ЛАЧХ і ЛФЧХ видно, що зі збільшенням частоти вхідних коливань амплітуда вихідних коливань до частоти wсп
не змінюється, а при w > wсп - зменшується, тобто ланка є фільтром високих частот.
Зміщення фаз негативне і з ростом частоти прагне до значення
4.Часові арактеристики.
Перехідна характеристика.
Виходячи з рівняння ланки, його характеристичне рівняння має вигляд:
Його корені
є комплексно-сполученими.
Позначимо p 1,2=-α±j β і знайдемо вільну складову hc(t):

Представимо hc(t) в тригонометричній формі. Для цього скористаємося формулами Ейлера:
Тоді

Оскільки hс(t) є рішенням рівняння при будь-яких значеннях C1 і C2, то

Оскільки
лінійно незалежні, то можемо записати:

Введемо позначення

Тоді

і, отже

Змушену складову рішення шукатимемо у виглядіhв (t) = С5. Підставивши це рішення у вихідне рівняння при x(t) = 1(t), одержимо С5 = k. Далі можемо записати:

Імпульсна перехідна характеристика:

Далі, скориставшись нульовими початковими умовами, знайдемо
значення постійних інтегрування A і j0:
Остаточно одержимо:
Вигляд цих характеристик представлений на рис. 3.16.
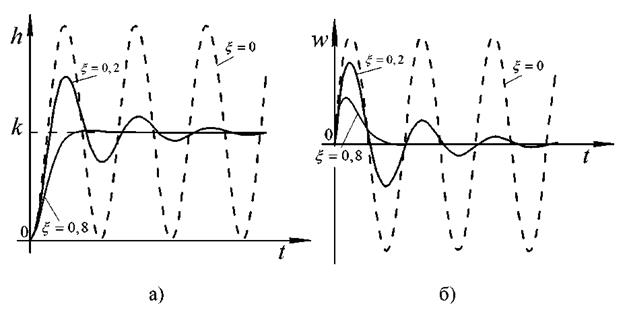
Рис. 3.16 – Часові характеристики:
а) h(t); б) w(t)
Характеристика h(t) являє собою синусоїду, амплітуда якої убуває по експонентним складовим:
де Tк - період коливань; n - номер точки, загальної і для відповідної
експоненти і для перехідної характеристики.
Визначимо період коливань Tк.
Для цього складемо систему рівнянь:
Звідки

й отже
Таким чином з ростом x збільшується і період Tк.
Знайдемо залежність максимального значення перехідної характеристики
від x:
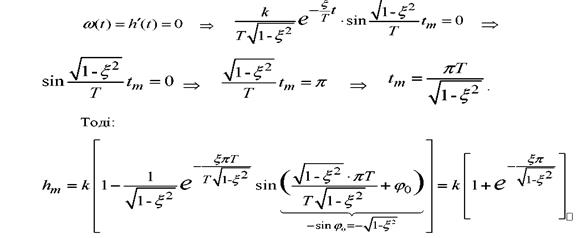
З останнього співвідношення видно, що з ростом ξ значення hm зменшується (тому що 1 - ξ 2 зменшується швидше, ніж росте ξ π).
Швидкість загасання коливальних процесів прийнято оцінювати ступенем загасання тобто відношенням різниці двох сусідних амплітуд до першої з них.
Очевидно, що чим ближче Y до одиниці, тим швидше загасають коливання і, навпаки, чим ближче Y до нуля, тим загасання повільніше. Покажемо, що Y залежить від співвідношення дійсної і мнимої частин коренів характеристичного рівняння.
Для цього, скориставшись рівнянням верхньої експонентної складової, запишемо:

Тоді
Відношення m = ba називають ступенем коливальності.
Таким чином Y = 1-e-2pm.
З останнього виразу видно, що чим менша дійсна частина α, тим
загасання повільніше (α = 0 = > µ = ba Y = 0), і навпаки, чим менша мнима частина b, тим загасання швидше (b = 0 = > m = 0 = > Y = 1).
Ступінь коливальності пов'язана з коефіцієнтом демпфірування x співвідношенням
Взаємозв'язок коефіцієнтів m, Y і x представимо у вигляді наступної таблиці:
| Ступінь коливальності m | Ступінь загасання Y | Коефіцієнт демпфірування x |
Аналіз наведених даних показує, що зміст коефіцієнта m є протилежним змісту коефіцієнтів Y і x.
Як відзначалося вище, при x = 0 ланка другого порядку називається консервативною.
У цьому випадку
Отже часові характеристики консервативної ланки мають вигляд незатухаючих коливань частотою b.
При x ³ 1 коливальна ланка вироджується в аперіодичну ланку другого порядку. При цьому
Таким чином у цьому випадку маємо дві послідовно з'єднаних аперіодичних ланки першого порядку. Можна показати, що корені характеристичного рівняння
Ланка запізнення
1. Рівняння ланки:
де t - час запізнювання, є трансцендентним.
В операторній формі при нульових початкових умовах це рівняння має вигляд
2. Передаточна функція:
3. Частотні характеристики: Частотна передаточна функція:

Звідки


На рис. 3.17 подані відповідні графіки.
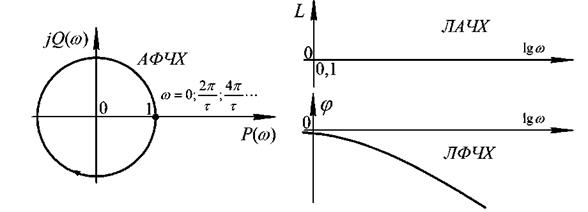
Рис. 3.17 – Частотні характеристики
Таким чином, співвідношення амплітуд вхідного і вихідного сигналів не залежить від частоти, а відставання за фазою вихідного сигналу тим
більше, чим більше частота.
4. Часові характеристики:
- перехідна характеристика
- імпульсна перехідна характеристика
Вигляд цих характеристик представлений на рис. 3.18.
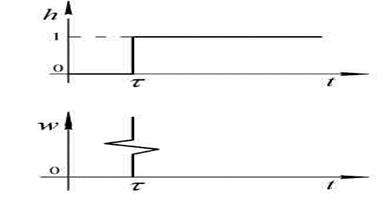
Рис. 3.18 – Часові характеристики
Слід зазначити, що ланка запізнення в більшості випадків погіршує стійкість системи, в яку входить, і робить її важко керованою. Крім того, аналіз і синтез таких систем пов'язаний з більшими труднощами.
У практичних розрахунках передаточну функцію ланки апізнення W(s) звичайно приблизно заміняють дрібно-раціональними функціями:

На закінчення роздягнула введемо нове поняття – мінімально-фазова ланка. Під такою ланкою матимемо на увазі ланку, в якій при одній і тій же частоті зміщення фази за модулем менше, ніж у будь-якої іншої ланки, що має однакову з нею АЧХ.
Стійкість САК
Під стійкістю системи розуміється здатність її повертатися до стану сталої рівноваги після зняття збурювання, що порушило цю рівновагу. Нестійка система безупинно віддаляється від рівноважного стану або робить довкола нього коливання зі зростаючою амплітудою.

Рис. 3.19
Стійкість лінійної системи визначається не характером збурювання, а структурою самої системи (рис. 3.19). Говорять, що система стійка "у малому", якщо визначено факт наявності стійкості, але не визначені її границі. Система стійка "у великому", коли визначені границі стійкості й те, що реальні відхилення не виходять за ці границі.
 Відповідно до класичного методу рішення диференціального рівняння шукається у вигляді:
Відповідно до класичного методу рішення диференціального рівняння шукається у вигляді:
y(t) = yвын(t) + yсв(t).
Тут yсв(t) - загальне рішення однорідного диференціального рівняння, тобто рівняння з нульовою правою частиною:
aoy(n) + a1y(n-1) +... + a(n-1)y’ + a(n)y = 0.
Фізично це означає, що всі зовнішні впливи зняті й система абсолютно вільна, її рухи визначаються лише власною структурою. Тому рішення даного рівняння називається вільної складової загального рішення. yвын(t) - частка рішення неоднорідного диференціального рівняння, під яким розуміється рівняння з ненульовою правою частиною. Фізично це означає, що до системи прикладений зовнішній вплив u(t). Тому друга складова загального рішення називається змушений. Вона визначає змушений сталий режим роботи системи після закінчення перехідного процесу.
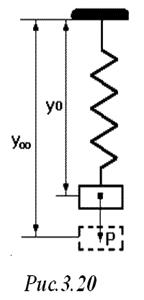
Можна провести аналогію між САК й пружиною, коливання якої описуються аналогічним диференціальним рівнянням рис. 3.20, 3.21. Відтягнемо пружину, а потім відпустимо, надавши її самої собі. Пружина буде коливатися у відповідності з вільної складового рішення рівняння, тобто характер коливань буде визначатися тільки структурою самої пружини.
Якщо в момент часу t = 0 підвісити до пружини вантаж, то на вільні коливання накладеться зовнішня сила Р. Після загасання коливань, описуваних тільки вільного складового загального рішення, система перейде в новий сталий режим, характеризуємий змушеної складової yвын = y(t 
 ). Якщо зовнішній вплив саме буде змінюватися за синусоїдальним законом P=Posin(
). Якщо зовнішній вплив саме буде змінюватися за синусоїдальним законом P=Posin( t+
t+  ), то після загасання перехідного процесу система буде робити змушені коливання з тією же частотою, що й сила, що змушує,
), то після загасання перехідного процесу система буде робити змушені коливання з тією же частотою, що й сила, що змушує,
тобто yвын = ymaxsin( t + y).
Кожна складова загального рішення рівняння динаміки шукається окремо. Змушена складова шукається на основі рішення рівняння статики для даної системи для часу t . Вільна складова являє собою суму з n окремих скдадових
де pi корінь характеристичного рівняння D(p) = a0pn + a1pn-1 + a2pn-2 +... + an = 0. Коріння можуть бути або речовинними pi = ai, або попарно комплексно сполученими pi = ai ± j i. Постійні інтегрування Аi визначаються виходячи з початкових і кінцевих умов, підставляючи в загальне рішення значення u, y й їхні похідні в моменти часу t = 0 й t .
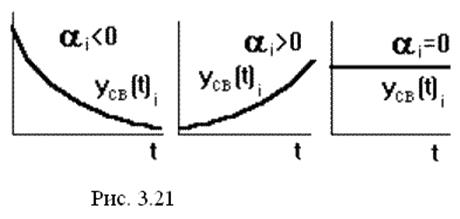
Кожному негативному речовинному кореню відповідає експоненціиально загасаюча в часі складова yсв(t)i, кожному позитивному - експоненціиально розбіжному, кожному нульовому кореню відповідає
yсв(t)i = const (рис.). Пари комплексно сполучених корінь із негативною речовинною частиною визначає загасаючі коливання із частотою i, при позитивній речовинній частині - розбіжні коливання,
при нульовий - незатухаючі рис. 3.22.
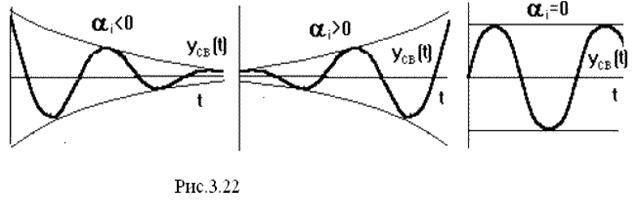
Тому що після зняття збурювання yвын(t) = 0, то стійкість системи визначається тільки характером вільної складової yсв(t). Тому умова стійкості систем по Ляпунову формулюється так: у стійкій системі вільна складова
 рішення рівняння динаміки, записаному у відхиленнях, повинна прагнути до нуля, тобто загасати.
рішення рівняння динаміки, записаному у відхиленнях, повинна прагнути до нуля, тобто загасати.
Виходячи з розташування на комплексній площині корінь із негативними речовинними частинами називаються лівими, з позитивними - правими
рис. 3.33. Тому умова стійкості лінійної САК можна сформулювати в такий спосіб: для того, щоб система була стійка, необхідно й досить, щоб всіх корінь її характеристичного рівняння були лівими. Якщо хоча б один корінь правий, то система нестійка. Якщо одне з корінь дорівнює нулю (у системах, де an = 0), а інша ліві, то система перебуває на границі аперіодичної стійкості. Якщо дорівнюють нулю речовинні частини однієї або декількох пар комплексно сполучених корінь, то система перебуває на границі коливальної стійкості.
Правила, що дозволяють судити про знаки корінь характеристичного рівняння без його рішення, називаються критеріями стійкості. Їх можна розділити на алгебраїчні (засновані на складанні по даному характеристичному рівнянню за певними правилами алгебраїчних виражень, по яких можна судити про стійкість САК) і частотні (засновані на дослідженні частотних характеристик).
Критерій Гурвица
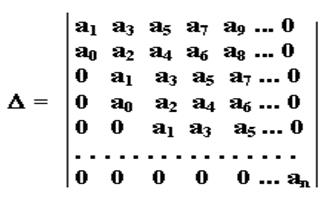
Гурвиц запропонував інший критерій стійкості. З коефіцієнтів характеристичного рівняння будується визначник Гурвица  по алгоритму:
по алгоритму:
1) по головній діагоналі ліворуч праворуч виставляються всі коефіцієнти характеристичного рівняння від a1 до an;
2) від кожного елемента діагоналі нагору й униз добудовуються стовпці визначника так, щоб індекси убували зверху вниз;
3) на місце коефіцієнтів з індексами менше нуля або більше n ставляться нулі.
Критерій Гурвица: для того, щоб САК була стійка, необхідно й досить, щоб всі n діагональних мінорів визначника Гурвица були позитивні.
Ці мінори називаються визначниками Гурвица.
Розглянемо приклади застосування критерію Гурвица:
1) n = 1 => рівняння динаміки: a0p + a1 = 0. Визначник Гурвица:
= 1 = a1 > 0 при a0 > 0, тобто умова стійкості: a0 > 0, a1 > 0;
2) n = 2 => рівняння динаміки: a0p2 + a1p + a2 = 0. Визначники Гурвица: 1 = a1 > 0, D2 = a1a2 - a0a3 = a1a2 > 0, тому що a3 = 0, тобто умова стійкості:
a0 > 0, a1 > 0, a2 > 0;
3) n = 3 => рівняння динаміки: a0p3 + a1p2 + a2p + a3 = 0. Визначники Гурвица: 1 = a1 > 0, 2 = a1a2 - a0a3 > 0, 3 = a3 2 > 0, умова стійкості: a0 > 0, a1 > 0, a2 > 0, a3 > 0, a1a2 - a0a3 > 0;
 У такий спосіб при n
У такий спосіб при n  2 позитивність коефіцієнтів характеристичного рівняння є необхідною й достатньою умовою стійкості САК.
2 позитивність коефіцієнтів характеристичного рівняння є необхідною й достатньою умовою стійкості САК.
При n > 2 з'являються додаткові умови.
Критерій Гурвица застосовують при n 4.
При більших порядках зростає число визначників і процес стає трудомістким. Є ряд модифікацій даного критерію, що розширюють його можливості.
Недолік критерію Гурвица - мала наочність. Достоїнство - зручний для реалізації на ЕОМ. Його часто використають для визначення впливу одного з параметрів САУ на її стійкість. Так рівність нулю головного визначника
n = an n-1 = 0 говорить про те, що система перебуває на границі стійкості. При цьому або an = 0 - при виконанні інших умов система перебуває на границі аперіодичної стійкості, або передостанній мінор n-1 = 0 - при позитивності всіх інших мінорів система перебуває на границі коливальної стійкості. Параметри САУ визначають значення коефіцієнтів рівняння динаміки, отже, зміна будь-якого параметра Ki впливає на значення визначника n-1. Досліджуючи цей вплив можна знайти, при якому значенні Ki визначник n-1 стане дорівнює нулю, а потім - негативним рис.. Це й буде граничне значення досліджуваного параметра, після якого система стає нестійкою.
Якість і точність САК
Стійкість САК є необхідним, але не достатньою умовою для її ефективного функціонування. Важливе значення має якість керування, тобто ступінь задоволення сукупності вимог до форми кривої перехідного процесу, що визначає придатність системи для конкретних умов роботи.
Для порівняння якості різних САК досліджується їхня реакція на типові впливи. Звичайно це східчаста (толчковая) функція, як один з найбільш несприятливих видів збурень. Для систем, що працюють із періодичними збуреннями, доцільно оцінювати якість керування при гармонійному впливі. Всі інші збурювання можна розкласти на східчасті впливи з використанням інтеграла Дюамеля, або в ряд Фур'є.
Всі сучасні методи аналізу якості керування можна розділити на прямі методи аналізу по кривій перехідного процесу або по частотних характеристиках, і непрямі методи, що дозволяють, не вирішуючи диференціального рівняння, визначити деякі показники якості процесу керування; до них, зокрема, ставляться кореневі, інтегральні й частотні методи.
Характеристика перехідного процесу
Нехай САР (рис. 3.34) при t = 0 впливає фактор, що обурює, f у вигляді одиничної східчастої функції. При нульових початкових умовах динамічний режим описується перехідною характеристикою h(t) = y(t) = y(t) - y0 = -e(t) рис.. По ній можна визначити усе найбільш важливі показники якості керування.
1. Статична помилка eуст = y0 - yуст = -hуст - це різниця між запропонованим і дійсним значенням керованої величини в сталому режимі. Для статичних систем статична помилка відмінна від нуля рис. 3.34 і пропорційна величині фактора, що обурює, f (у лінійних САК) і коефіцієнту передачі системи по даному збурюванню, а для астатических - дорівнює нулю рис.3.35.
Рис. 3.34 – Статична система
2. Час перехідного процесу tпп - це час від моменту впливу, починаючи з якого коливання керованої величини не перевищують якогось наперед заданого значення, тобто |h(t)-hуст| . Звичайно приймають = 0.05hуст.
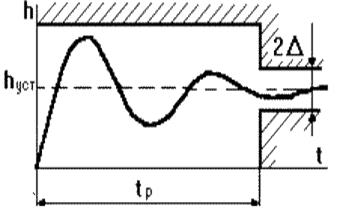
Рис.3.35 – Астатична система
2. Перерегулювання s - це максимальне відхилення керованої величини від сталого значення, виражене у відносних одиницях:
s =  .
.
Тут hmax1 - значення першого максимуму перехідної характеристики. При більших перерегулюваннях можуть виникнути значні динамічні зусилля в механічній частині системи, електричні перенапруги й т.ін. Припустиме значення s визначається з досвіду експлуатації. звичайно воно становить 0.1...0.3, іноді допускається до 0.7.
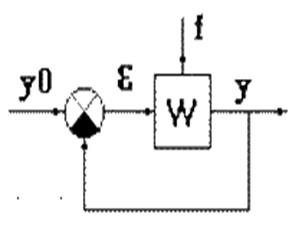
Рис. 3.36
4. Частота коливань = 2  /T, де T - період коливань.
/T, де T - період коливань.
5. Число коливань n за час tпп.
6. Декремент загасання k, дорівнює відношенню двох суміжних перерегулювань:  .
.
При створенні САК припустимі значення показників якості обмовляються технічними умовами, що можна представити у вигляді діаграми показників якості. Це область, за межі якої не повинна виходити перехідна характеристика (рис. 3.37).
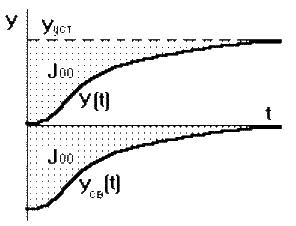
Рис.3.37
Інтегральні критерії якості
Інтегральні критерії дозволяють судити про якість керування шляхом обчислення інтегралів від деяких функцій керованої величини.
Ця функція вибирається таким шляхом, щоб значення певного інтеграла від цієї функції за часом від 0 до + було однозначно пов'язане з якістю перехідного процесу. У той же час даний інтеграл повинен порівняно просто обчислюватися через коефіцієнти рівнянь досліджуваної системи.
Наприклад, якщо перехідна характеристика є монотонної, то можна затверджувати, що якість перехідного процесу тим краще, чим менше площа, обмежена даної кривої й сталим значенням керованої величини рис. 3.38. Вона дорівнює площі, обмеженої кривої зміни вільної складової керованої величини й віссю абсцис.
Якщо система стійка, то вільна складова керованої величини в межі прагне до нуля  , тому площа обмежена даній кривій має кінцеве значення й визначається по формулі:
, тому площа обмежена даній кривій має кінцеве значення й визначається по формулі:
Joo =  .
.
Величина Joo являє собою лінійну оцінку якості керування. Чим вона менше, тим вище швидкодія системи. При виборі параметрів системи прагнуть забезпечити мінімум Joo. Якщо є який то варируємий параметр A, те можна побудувати криву Joo = f(A) рис. 3.38. Її мінімум, обумовлений з умови dJoo/d = 0, дасть оптимальне значення A.
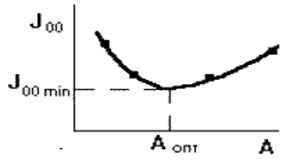
Рис. 3.38
Нехай дане рівняння динаміки замкнутої САК:
(a0pn + a1pn-1 + a2pn-2 +... + an)y = (b0pm + b1pm-1 +... + bm)u.
Вільний процес описується однорідним диференціальним рівнянням:
(a0pn + a1pn-1 +... + an)yсв = 0,
отже:
yсв = 
yсв = 
Joo =  св(t)dt =
св(t)dt =  .
.
Нехай при t = 0 САК мала наступні початкові умови:
yсв(0) = y0,  = y0’,...,
= y0’,...,  = y0(n-1).
= y0(n-1).
Крім того
yсв() = 0,  () = 0,...,
() = 0,...,  () = 0,
() = 0,
тому що процес загасає й при t вільна складова й всі похідні стають дорівнюють нулю. Підставляючи ці значення, одержуємо:
Joo = (a0y0(n-1) + a1y0(n-1) +... + an-1y0)/(an.
Тобто лінійну оцінку якості регулювання можна легко обчислити, знаючи початкові умови й коефіцієнти диференціального рівняння. Можливі й інші лінійні оцінки якості, але вони використаються рідше, наприклад:
J01 =  св(t)
св(t)  t dt; J0n = св(t) tndt.
t dt; J0n = св(t) tndt.
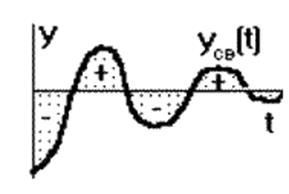
Рис. 3.39
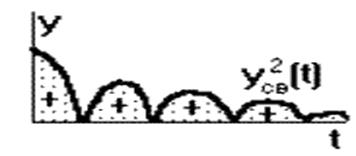
Рис. 3.40

Рис.3.41
Лінійні оцінки якості незастосовні при коливальному процесі. Тому що площі, обмежені кривій yсв(t) і віссю абсцис складаються з урахуванням знака, те мінімальному значенню Joo може відповідати процес із більшим числом коливань і малою швидкодією (рис.). У цьому випадку більше ефективні квадратичні оцінки якості, наприклад,
J20 = yсв2(t)dt.
Значення цього інтеграла відповідає площі під кривій yсв2(t) і віссю абсцис, що завжди позитивна (рис.).
Вибираючи параметри САК по мінімуму J20 ми наближаємо криву yсв(t) до осей координат, що приводить до зменшення часу регулювання (рис.). Висновок формули для обчислення цієї оцінки складний, тому обмежимося зауваженням, що значення обчислюється через коефіцієнти диференціального рівняння a0...an,b0...bm. При обчисленні доданків у цій формулі використаються визначники Гурвица, так що навіть розрахунок по ній сполучений з певними труднощами й вимагає використання ЕОМ або спеціальних таблиць.
При виборі параметрів САК по мінімуму J20 часто одержують небажану колебательность процесу, тому що наближення yсв(t) до осі ординат викликає різке збільшення початкової швидкості, що у свою чергу може викликати велике перерегулювання, зменшивши при цьому запас стійкості. Для того, щоб забезпечити плавність протікання процесу, у квадратичну оцінку якості додається доданок, що залежить від швидкості зміни регульованого параметра yсв’(t). Одержуємо критерій якості
J21 =  св2(t) + t2 (yсв’(t))2]dt,
св2(t) + t2 (yсв’(t))2]dt,
де  - якась наперед задана постійна часу, що визначає вагове співвідношення між оцінкою по yсв і по yсв’. При малих значеннях зменшення коливання буде незначним. Завищення збільшить час перехідного процесу так, що її вибір визначається конкретними умовами.
- якась наперед задана постійна часу, що визначає вагове співвідношення між оцінкою по yсв і по yсв’. При малих значеннях зменшення коливання буде незначним. Завищення збільшить час перехідного процесу так, що її вибір визначається конкретними умовами.
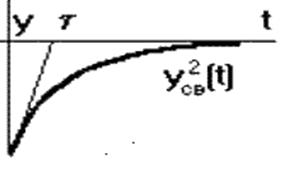
Рис.3.42
Цей інтеграл має найменше значення, якщо перехідний процес відповідає експоненті з постійної часу (рис.). Інакше кажучи, по міркуваннях якості керування варто прагнути до того, щоб перехідна характеристика замкнутої САК якнайменше відрізнялася від характеристики інерційної ланки першого порядку, що має наперед задану постійну часу , значення якої визначаються технічними умовами.

