




Основные понятия и определения
Технический элемент и система
В теории надежности все технические объекты подразделяются на элементы и системы.
Элемент есть объект, рассматриваемый в данной задаче как нечто целое, неделимое. Фактически все элементы состоят из более "мелких" деталей, частей, подэлементов, однако в каждой конкретной задаче внутренняя структура элемента и все взаимосвязи его частей игнорируются.
Примеры технических элементов: электролампа, реле, датчик, линия связи, регулятор, регистрирующий (показывающий) прибор, исполнительный механизм, микроконтроллер, автоматическая система регулирования (рис. 2.1).
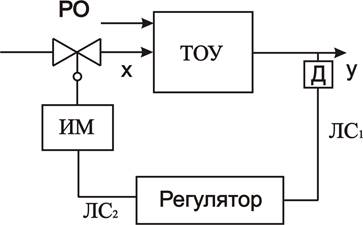
Рис. 2.1 – Схема автоматической системы регулирования
Система – совокупность двух или более элементов, взаимодействующих между собой при достижении некоторой цели (решении задачи).
Примеры систем:
· автоматическая система регулирования (АСР), состоящая из ряда элементов: Д - датчик, Р - регулятор, ИМ -исполнительный механизм, РО - регулирующий орган, ЛС -линии связи, ТОУ – технологический объект управления (рис. 2.1);
· автоматический регулятор типа ПИ, состоящий из трех элементов: усилитель, интегратор и сумматор;
· электролампа, состоящая из двух элементов: колба и нить накаливания.
Деление объектов на элементы и системы является условным и зависит от цели и глубины исследования надежности данного объекта.
В данном разделе рассматривается надежность только элементов.
Модель элемента
На элемент воздействуют извне (рис. 2.2):
X к - вектор контролируемых (измеряемых) координат;
X нк - вектор неконтролируемых (ненаблюдаемых) переменных.
Реакцией элемента на воздействие X к и X нк является вектор выходных координат Y, состоящий из n компонент y 1, y 2,..., yi,..., yn.
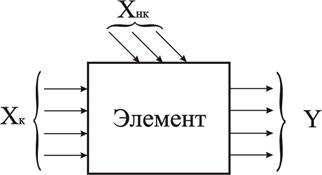
Рис. 2.2 – Модель элемента
Каждая переменная yi характеризует то или иное свойство элемента или его отдельных частей. Выбор числа n и набора переменных yi,  осуществляется на основе проектно- конструкторских и научно-исследовательских разработок и хотя зачастую является субъективным, но, после задания n и yi, в техническом паспорте элемента, становятся формально объективными.
осуществляется на основе проектно- конструкторских и научно-исследовательских разработок и хотя зачастую является субъективным, но, после задания n и yi, в техническом паспорте элемента, становятся формально объективными.
Во время эксплуатации элемента имеют место случайные и регулярные изменения Х к и Х нк, что ведет к вариациям компонент yi вектора Y во времени t (рис. 2.3).
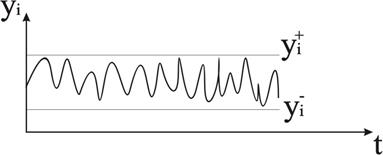
Рис. 2.3 – Пример нормальных вариаций выходной координаты yi элемента
Далеко не все координаты Х к и Y измеряются непрерывно или, хотя бы дискретно. Но принципиально компоненты векторов Х к и Y могут быть
измерены (этим они отличаются от неконтролируемых составляющих вектора Х нк).
При проектировании (конструировании) и изготовлении элемента устанавливают диапазон возможных (допустимых) изменений координат вектора Х к при некотором "обычном" уровне помех Х нк. Обозначим множество
допустимых изменений входов через  . Будем говорить о нормальном режиме эксплуатации элемента, если Х к Î .
. Будем говорить о нормальном режиме эксплуатации элемента, если Х к Î .
Одновременно с выбором при конструировании и изготовлении элемента устанавливают диапазон (yi-, yi+) допустимых изменений каждой выходной координаты yi, при максимальных вариациях  (рис. 2.3). Величины yi-, yi+ , определяют расчетным или экспериментальным путем и хотя они субъективны, но, после внесения в технический паспорт элемента рассматриваются как объективные границы некоторого множества
(рис. 2.3). Величины yi-, yi+ , определяют расчетным или экспериментальным путем и хотя они субъективны, но, после внесения в технический паспорт элемента рассматриваются как объективные границы некоторого множества
 ={ yi: yi- £ yi £ yi+, }
={ yi: yi- £ yi £ yi+, }
называемого далее множеством режимов нормальной или допустимой работы элемента.
Пример. Пусть элемент есть понижающий стабилизатор, предназначенный для получения переменного напряжения (105-115) В при возможных колебаниях входного напряжения от 180 до 260 В.
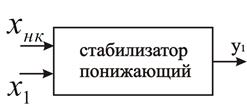
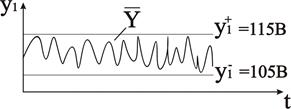
Рис. 2.4 – Схема понижающего Рис. 2.5 – Пример работоспособного
стабилизатора напряжения состояния стабилизатора напряжения
Обозначим входное напряжение через х 1, а выходное – через y 1 (рис. 2.4), тогда можно ввести множества:
 ={ х 1: 180£ х 1 £ 260 В},
={ х 1: 180£ х 1 £ 260 В},
={ y 1: 105 £ y 1 £ 115, В},
Х нк ={частота, влажность и температура среды и др.}.
Множество показано на рис. 2.5.
Пример. Пусть элементом является АСР, показанная на рис. 2.6 и состоящая из датчика - Д, элемента сравнения - ЭС, ПИ-регулятора, исполнительного механизма - ИМ, регулирующего органа – РО, линии связи ЛС1 и ЛС2 х 1 - нагрузка на ТОУ, х 1 Î Х к; y - регулируемая переменная; Х нк ={воздействия на ТОУ по другим каналам, изменение характеристик ТОУ}.

Рис. 2.6 – Автоматическая система регулирования
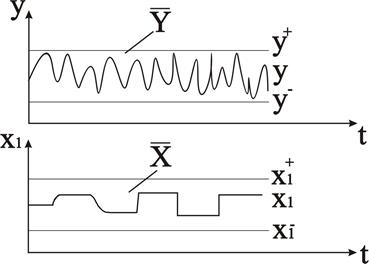
Рис. 2.7 – Множества Х к и Y для АСР
Для элемента АСР множества  и
и  показаны на рис. 2.7. Здесь х 1-, х 1+ и y -, y+ - заданные величины.
показаны на рис. 2.7. Здесь х 1-, х 1+ и y -, y+ - заданные величины.
Работоспособность и отказ элемента
Технический элемент считается работоспособным (исправным), если при нормальном режиме эксплуатации Х к Î имеет место допустимая (безопасная) работа элемента  :
:
yi - £ yi £ yi+, i =  (1)
(1)
Если элемент создан для выполнения n фунций "удержания" каждой координаты yi в своем диапазоне [ yi -, yi+ ] при Х к Î , то элемент работоспособен (исправен) при выполнении всех своих функций.
При нарушении хотя бы одного неравенства (1) в произвольный момент времени t при нормальных условиях эксплуатации Х к Î , имеет место отказ или выход из строя элемента:
yi Ï  , i =
, i =
Причины отказов связаны с проектными, конструкторскими, эксплуатационными ошибками и нарушениями, с заметными отклонениями возмущений Х нк от "обычного" уровня, с неучетом (или недоучетом) тех или иных закономерностей, свойств материалов, конструкций и т. п.
Иными словами, конструктивные и эксплуатационные ошибки обусловлены нашим незнанием и (или) не соблюдением установленных норм и правил изготовления и эксплуатации элемента. Эти "неизвестные" ошибки порождают отказы элементов в случайные моменты времени t.

Рис. 2.8 – К понятию дефекта (ошибки) и отказа элемента
Если в момент t =0 включить в работу большое число N исправных одинаковых элементов, то их отказы будут наблюдается в случайные моменты времени tj, j =  (рис. 2.9).
(рис. 2.9).
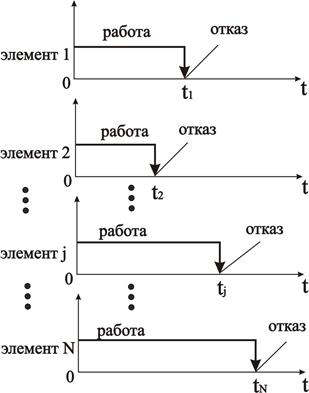
Рис. 2.9 – Иллюстрация понятия потока отказов невосстанавливаемых элементов
Длительности работы элементов t 1, t 2,..., tj,..., tN есть реализации случайной величины Т - время безотказной работы или наработка до отказа.
Последовательность { tj, j =1, 2, …} образует поток отказов элемента.
Наработка до отказа Т и поток отказов { tj, j =1, 2, …} наиболее полно характеризуют свойство безотказности (надежности) элемента.
Классификация отказов элементов
Зависимые: отказы нескольких элементов вызваны одной ошибкой. Например, одновременное погасание осветительных ламп в жилом доме может быть вызвано отказом общего предохранителя П1 на все здание.
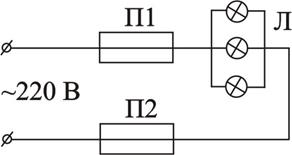
Рис. 2.10 – К понятию зависимого отказа
Независимые: отказы разных элементов вызваны разными причинами (ошибками), при этом вероятность одновременных отказов пренебрежимо мала.
Устойчивые: не исчезают сами по себе; после устойчивого отказа элемент заменяется на новый или ремонтируется (рис. 2.11).
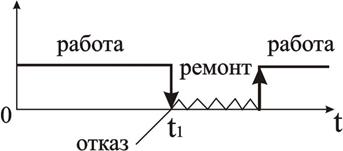
Рис. 2.11 – К понятию устойчивого отказа элемента
Неустойчивые (перемежающиеся): отказ может самопроизвольно исчезнуть, а затем возникнуть снова, ибо причина его не устранена (рис. 2.12).
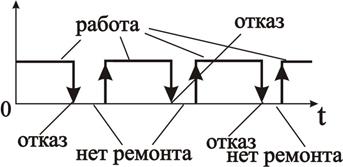
Рис. 2.12 – К понятию неустойчивого (перемещающегося) отказа элемента
Внезапные: возникают неожиданно, анализ yi (t) не позволяет прогнозировать отказ; причины внезапных отказов - обрывы, короткие замыкания, механические поломки (рис. 2.13).

Рис. 2.13 – Пример внезапного отказа системы
Постепенные: характер изменения координаты yi (t) позволяет прогнозировать момент отказа элемента по тренду yi (t) (рис. 2.14).
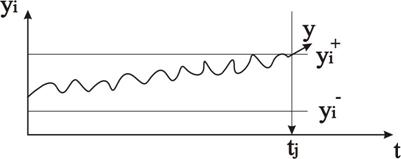
Рис. 2.14 – Пример постепенного отказа системы
Полные: нарушены все n неравенств yii £ yi+, 
Частичные: нарушена лишь часть неравенств yi- £ yi £ yi+,
Иногда, по договоренности, элементы с частичными отказами могут вводиться в эксплуатацию, но с неполной (“частичной ”) нагрузкой.
Восстанавливаемые: допускают ремонт элемента и этот ремонт экономически выгоднее приобретения нового элемента.
Невосстанавливаемые: отказ элемента приводит к его полному разрушению или ремонт отказавшего элемента не выгоден с экономической точки зрения.
Для электротехнических элементов характерны следующие типы отказов:
Обрыв: приводит к разрыву электрической цепи АБ (рис. 2.15 а, б)
Рис. 2.15 – Отказ типа “обрыв”:
а – элемент до отказа, б – элемент после отказа
Обрыв – наиболее распространенный вид отказа электротехнических элементов и систем. В частности для технических средств автоматизации доля отказов типа “обрыв” достигает 70 – 80%.
Короткое замыкание: исключает элемент из цепи АБ (рис 2.16 а, б).

Рис. 2.16 – Отказ типа “короткое замыкание” (КЗ):
а – элемент до отказа, б – элемент после КЗ, ◦◦◦ - новая цепь
Отказ типа КЗ наблюдается значительно реже чем отказ “обрыв”, но более опасен для других элементов электротехнических систем.
Режимы функционирования элементов
Невосстанавливаемые элементы работают до первого отказа (дальнейшая судьба отказавшего элемента пока нас не интересует); длительность безотказной работы j- го элемента есть наработка tj до первого отказа.
Если гипотетически одновременно (в момент t=0) включить в работу N одинаковых исправных элементов, то их функционирование на конечном отрезке времени можно условно отобразить схемой на рис. 2.17

Рис. 2.17 – Иллюстрация потока отказов невосстанавливаемых элементов
Результатом этого "эксперимента" являются:
 - реализация наработки на отказ Т;
- реализация наработки на отказ Т;
 - длительность эксперимента;
- длительность эксперимента;
N(t) – число работоспособных элементов в момент времени  ,
,  ;
;
 - число отказов элементов на малом отрезке времени
- число отказов элементов на малом отрезке времени  ,
,  ;
;
N-N(t) – число отказавших элементов к моменту времени t.
В реальных условиях в работу зачастую включают неисправные элементы, которые документально считаются работоспособными (по утверждению отдела технического контроля (ОТК) завода-изготовителя). Однако, далее всюду будем базироваться на допущении:
все включаемые в работу элементы работоспособны (исправны) и N(0)=N.
Восстанавливаемый элемент работает до отказа в случайный момент времени tj, затем ремонтируется некоторое случайное время  и снова включается в эксплуатацию. Процесс функционирования одного восстанавливаемого элемента для N циклов "работа-ремонт" показан на
и снова включается в эксплуатацию. Процесс функционирования одного восстанавливаемого элемента для N циклов "работа-ремонт" показан на
рис. 2.18

Рис. 2.18 – Схема функционирования восстанавливаемого элемента: р – работа, в – восстановление.
Примем еще одно важное допущение:

