




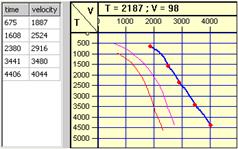
| Данная область диалогового окна содержит сводный график, на котором отображаются все скоростные законы, а также таблицу, в которой в числовом виде содержатся узловые точки (T;V) активного скоростного закона. |
Одновременно можно работать только с одним активным скоростным законом. Добавление точек (T;V) в активный скоростной закон можно выполнять нажатием левой кнопки мыши на графике, либо путём добавления значений (T;V) в таблицу. Удаление точки из активного скоростного закона производится нажатием правой кнопки мыши на графике, либо путём удаления соответствующей записи в таблице (клавиша Delete). Редактирование точки может осуществляться путём перетаскивания её на графике, либо в таблице.
Для редактирования любого скоростного закона необходимо сделать его активным либо с помощью кнопок переключения активного скоростного закона, либо выбрав необходимый скоростной закон в менеджере (в левой части диалогового окна).
Информационные поля
Над сводным графиком имеется редактируемое информационное поле - строка-комментарий, соответствующая активному скоростному закону. Предполагается, что в ней может содержаться полезная для пользователя информация, относящаяся к тому или иному скоростному закону. Например, способ и условия создания скоростного закона.
В верхней части диалогового окна подпрограммы расположены 4 информационных поля, 2 последних из них являются редактируемыми.
| Количество скоростных законов | Данное поле содержит информацию о количестве сформированных скоростных законов в создаваемой или редактируемой библиотеке |
| Номер скоростного закона | Содержит информацию о порядковом номере активного скоростного закона. |
| X=...; Y=... | Содержит координаты привязки X-ОГТ и Y-ОГТ активного скоростного закона |
| Номер ОГТ=... | Содержит номер ОГТ, к которому относится активный скоростной закон. |
При щелчке левой кнопки мыши в информационных полях X=...; Y=... и Номер ОГТ=... появляются соответствующие диалоговые окна редактирования значений (только при выбранном активном скоростном законе).
В верхней части диалогового окна расположено информационное окно "Комментарий", относящееся к библиотеке в целом. Информация, введённая пользователем в этом окне, будет сохранена в создаваемой или редактируемой библиотеке.
v Порядок формирования 2D скоростной модели:
- Добавить новый скоростной закон с помощью кнопки  .
.
- Добавить точки (T;V) в активный скоростной закон с помощью мыши на графике или через таблицу значений.
- Произвести, если необходимо, редакцию значений путём перетаскивания узловых точек на графике с помощью мыши, либо через таблицу значений.
- Заполнить информационные поля активного скоростного закона (X-CDP, Y-CDP, CDP, комментарий).
- Для ввода следующего скоростного закона повторить вышеуказанные пункты необходимое (по числу скоростных законов в модели) количество раз.
- Заполнить информационное поле "Комментарий", относящееся ко всей библиотеке в целом.
- Нажать кнопку "Записать" для сохранения сформированной библиотеки в базе данных программы Seis Win.
Получение временного разреза
с переменными вдоль профиля кинематическим поправками
v Сформировать задание, подобное показанному ниже:
v Параметры модулей данного задания тождественны параметрам задания Суммирование с априорными статическими и кинематическими поправками за иcключением модуля NMO Correction, использующего созданную ранее библиотеку LMV:

v Выполнить задание и вывести суммарный временной разрез на печать. Сопоставить временные разрезы, полученные с априорными и откорректированными кинематическими поправками.
Коррекция статических поправок
Коррекция статических поправок в комплексе Seis Win реализована в модуле New Lista Static Correction.
Модуль выполняет расчёт и ввод статических поправок в трассы в автоматическом режиме. Для каждой ОГТ формируется модельная трасса в соответствии с параметрами построения модели, заданными пользователем. Затем для всех исходных трасс, принадлежащих данной ОГТ, рассчитываются статические поправки по максимуму ФВК исходной и модельной трассами. Вычисленные поправки могут быть записаны в библиотеку LSL и использованы в дальнейшем программой Lista Library Static.

Основные параметры модуля:
Тип трассы на выходе процедуры:
исходные трассы с введёнными СтП – рассчитанная статическая поправка (СтП) вводится в трассу, а её значение заносится в заголовок трассы.
исходные трассы без ввода СтП – значение рассчитанной СтП заносится в заголовок трассы, в трассу поправка не вводится.
модельные суммотрассы – на выход процедуры поступают модельные трассы, каждой ОГТ соответствует одна модельная трасса.
Параметры построения модели:
база суммирования (количество ОГТ) – количество точек ОГТ, на пространственной базе которых должно производиться построение каждой модельной трассы.
максимально допустимое значение СтП (мсек) – значение временного интервала, в пределах которого рассчитывается значение СтП по максимуму функции взаимной корреляции (ФВК) исходной и модельной трассы.
использовать горизонтальное суммирование – Модельная трасса будет формироваться путём горизонтального суммирования исходных трасс на пространственной базе, в соответствии с параметром "база суммирования", заданным пользователем. В этом случае параметры "начальное время окна корреляции" и "конечное время окна корреляции" определяют границы временного окна, в пределах которого будет рассчитываться ФВК исходной и модельной трассы.
использовать суммирование вдоль пикировки – Модельная трасса будет формироваться путём суммирования исходных трасс вдоль заданной пользователем пикировки. Параметры "интервал выше значения пикировки" и "интервал ниже значения пикировки" определяют границы временного окна, в пределах которого будет рассчитываться ФВК исходной и модельной трассы. Стоит дополнительно отметить, что данные параметры определяют границы временного окна не в абсолютных значениях времени, а в относительных, в зависимости от значения пикировки для данной ОГТ.
Запись потрассных СтП в библиотеку:
 записывать статические поправки в библиотеку – включение опции записи СтП, вычисленных в модуле, в библиотеку LSL (библиотека создается в данном модуле, имя созданной библиотеки выводится на экран дисплея по завершении работы модуля).
записывать статические поправки в библиотеку – включение опции записи СтП, вычисленных в модуле, в библиотеку LSL (библиотека создается в данном модуле, имя созданной библиотеки выводится на экран дисплея по завершении работы модуля).
Комментарий – пояснения к созданной в библиотеке LSL.
v Снять комментирование с модуля New Lista Static Correction.
v Параметры модуля, рекомендуемые к использованию, показаны на рисунке выше.
v Параметры остальных модулей в рассматриваемом задании – те же, что и в предыдущих.
Структура данных, записываемых в библиотеку LSL показана на нижеследующем рисунке в поле Содержание библиотеки.

v Выполнить задание и вывести суммарный временной разрез на печать. Сопоставить, полученные с временные разрезы.
Итеративная коррекция статических и кинематических поправок
Точность определения скоростной характеристики зависит от точности статических поправок. В свою очередь, точность коррекции статических поправок зависит от точности кинематических. Из этого следует, что процедуры коррекции статических и кинематических поправок образуют итерационный процесс.
Для реализации итеративного процесса необходимо после коррекции кинематических поправок выполнить коррекцию статических, используя откорректированные скоростные зависимости (что и было сделано ранее), а после коррекции статических поправок возвращаться к коррекции кинематических, используя откорректированные статические поправки.
Для этого на временном разрезе, полученном после коррекции статических поправок, выбираются новые участки сканирования
В задание на сканирование скоростей необходимо внести изменения с тем, чтобы при сканировании использовались откорректированные статические поправки.
v Добавить в задание на сканирование скоростей модуль Lista Library Static, поместив его перед модулем Velocity Scan и указав в его диалоговом окне имя LSL -библиотеки, в которую модулем New Lista Static Correction были записаны корректирующие статические поправки.

v Выполнить сканирование и визуализировать временной разрез сканирования. Определить скоростные зависимости.
v Откорректировать двумерную скоростную модель, добавив в неё недостающие скоростные зависимости и откорректировав имеющиеся (как изложено в п.9).
v Просуммировать профиль с откорректированной двумерной скоростной моделью. Оценить необходимость повторной коррекции статических поправок (необходимость продолжения или окончания итерационного процесса).
заключение
Рассмотренный цикл лабораторных работ выполняется в следующем порядке.
- Изучение комплексов RadExPro Plus и SeisWin в целом и алгоритмов программ, используемых в цикле лабораторных работ (лекционный материал и данное пособие).
- Практическое ознакомление с работой в этих комплексах.
- Получение исходных материалов (тестового профиля, априорной скоростной зависимости).
- Выполнение лабораторных работ. В процессе выполнения каждого из этапов описываются:
- исходные данные;
- обоснование принимаемых решений;
- результативные материалы. - Составление Отчета (на основании вышеупомянутых описаний).Отчет должен содержать разделы, соответствующие 2-8 лабораторным работам.
Защита отчёта.

