




Теоретическая часть.
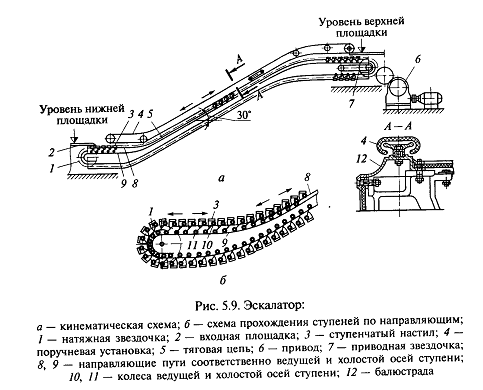
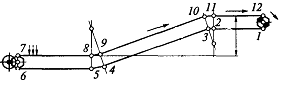
Эскалаторами называют пластинчатые конвейеры, настил у которых выполнен в виде ступеней для перемещ
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
Для эскалаторов используют привод редукторного типа односторонний реже двусторонний. Привод имеет рабочий, установленный на главном валу, и аварийный тормоза. Последний срабатывает при нарушении кинематической связи межу элементами привода. Для замедленного движения полотна при его техническом обслуживании, а также для размыкания аварийного тормоза применяют вспомогательные приводы. Поручневую установку выполняют виде конвейера с узкой С-образной лентой, движущейся синхронного с лестничным настилом. Поручень изготавливают из высокопрочного бельтинга, покрытого с наружной стороны слоем резины. Поручень приводится в движение фрикционным блоком с приводом от главного вала или тяговой цепи. Для натяжения тяговой цепи в эскалаторах применяют пружинного-винтовые или грузовые натяжные устройства.
Главный привод эскалатора предназначен для передвижения лестничного полотна эскалатора с эксплуатационной скоростью.
Вспомогательный привод (или другое устройство) эскалатора предназначен для передвижения лестничного полотна с ремонтной скоростью при монтажных и демонтажных работа, при техническом обслуживании, а также при растормаживании аварийного тормоза.
Наиболее широкое распространение для электропривода эскалаторов получили асинхронные двигатели с фазным ротором, которые при пуске в несколько ступеней с фазным ротором, которые при пуске в несколько ступеней обеспечивают заданное ускорение. На станциях метрополитена, переходах в торговых помещениях и т.д. – там, где длина полотна эскалатора невелика, применяются асинхронные двигатели с короткозамкнутым ротором. Для ограничения бросков тока в сети, а также некоторого снижения момента двигателя и ускорения электропривода при пуске в цепь статора двигат
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
Расчётная часть.
Расчёт статических нагрузок, действующих на валу двигателя.
Расчетные длины эскалатора: А=1м B=1м L=58 м
Распределённая масса ходовой части
q0=60*B+А=60*1+70*0.1=123 кг/м
B-ширина настила, 1 м. При перевозке пассажиров коэффициент А =70, полотно эскалатора является безбортовым, поэтому коэффициент А берется с вычетом 10 %.
Коэффициент сопротивления при огибании звездочек  =1.02
=1.02
Коэффициент сопроти
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
 =1.06
=1.06
Распределенная масса эксплуатационной нагрузки
q=2170H=221.2 кг/м
Точка минимального натяжения определяется из условия
q0*g*(L2+L1)*w<q0*g*H
123*9.81*(50+1)*0.025<123*9.81*30
1508.2875<36198.9
Условие выполнено, минимальное натяжение в точке 4. При данных условиях, возможно принять минимальное значение натяжения в точке 4 равным 2000H.
S4=SMIN=2000H
S5= *S4=1.06*2000=2120 H
S6=S5+q0*g*L3*w=2120+123*9.81*1*0.025=2150.167575 H
S7= *S6=1.02*2187.44375=2193.169065 H
S8=S7+(q0+q)*g*L3*w=2193.169065 +(221,2+123)*9.81*1*0.025=2277.584115 H
S9= *S8=1.06*2519,84 =2414.239162 H
S10=S9+(q0+q)*g*L2*w+(q0+q)*g*H=2414.239162+(221,2+123)*9.81*58*0.025+(221,2+123)*9.81*30=108608.3721 H
S11= *S10=1.06*108608.3721=115124.8744 H
S12=SMAX=S11+(q0+q)*g*L1*w=115124.8744+(221.2+123)*9.81*1*0.025=115209.2895 H
Для определения натяжений в точках 3-1 производим обход против направления движения полотна.
S3=S4-q0*g*L2*w+ q0*g*H=2000-123*9.81*58*0.025+123*9.81*30=36449.2865
S2=S3/ =36449.2865/1.06=34386.11934 H
S1=S2-q0*g*L1*w=34386.11934 -123*9.81*1*0.025=34355.95359 H
Тяговое усилие W0= S12-S1=115209.2895 -34355.95359=80853.33591 H
Сопротивление движению тягового элемента
W=q*g*H+kПС(W0- q*g*H)= 80853.33591+1*(80853.33591-221.2*9.81*30)=
=80853.33591H
kПС – коэффициент увеличения сопротивления при пуске. Для данных условий kПС=1
| Изм. |
| Лист |
| № докум. |
| Подпись |
| Дата |
| Лист |
Статический момент
MC=W*D0/(2*u0*η0)= 80853.33591*1.695/(2*58.1*0.911)=1278.163 Нм
Динамическое усилие
SДИН=kИ*(k’*mГ+k’’*mR)*2*  *v2*kД/(z2*tЦ)=0.75*(0.8*13372+0.75*14760)*2*3.14*0.882*2.7/(402*0.133)=1007.37
*v2*kД/(z2*tЦ)=0.75*(0.8*13372+0.75*14760)*2*3.14*0.882*2.7/(402*0.133)=1007.37
Коэффициент интерференции упругих волн в цепиkИ=0.75
Коэффициент массы нагрузки k’=0.8
Длина цепи LЦ=120 м, следовательно, k’’=0.75
mГ=60*221.2=13272 кг
mR=123*120=14760 кг
Коэффициент дополнительной нагрузкиkД=2.7
Частота вращения звездочки nЗВ=60*v/( *D0)=60*0.88/(3.14*1.695)=9.92 об/мин
Угловая скорость звездочки  ЗВ=2* *v/(z*tЦ)=2*3.14*0.88/(40*0.133)=1.04 рад/с
ЗВ=2* *v/(z*tЦ)=2*3.14*0.88/(40*0.133)=1.04 рад/с
jMAX= ЗВ2*tЦ /2=1.042*0.133/2=0.072

