




Составное (сложное) движение точки
Сложное движение точки – такое движение, при котором точка участвует одновременно в двух или нескольких движениях.
Примеры сложного движения точки (тела): лодка, переплывающая реку; человек, идущий по движущемуся эскалатору; камень подвижной кулисы, поршень качающегося цилиндра
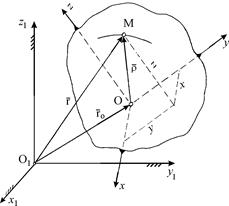
Рассмотрим тело, которое свободно движется по отношению к неподвижной системе координат О xyz. Пусть точка М совершает движение по поверхности этого тела. Через произвольную точку О1 движущегося тела проведем неизменно связанные с этим телом оси x1, y1, z1. Систему осей О1 x1 y1 z1 называют подвижной системой отсчета.
Движение точки М по отношению к неподвижной системе отсчета называют абсолютным движением точки.
Абсолютное движение (a) - движение точки, рассматриваемое относительно неподвижной системы отсчета. Абсолютное движение точки характеризуется изменением радиуса-вектора  по модулю и направлению. Абсолютная скорость (ускорение) точки va (aa) - скорость (ускорение) точки, вычисленная относительно неподвижной системы отсчета.
по модулю и направлению. Абсолютная скорость (ускорение) точки va (aa) - скорость (ускорение) точки, вычисленная относительно неподвижной системы отсчета.
Относительное движение (r) - движение точки, рассматриваемое относительно подвижной системы отсчета. Относительная скорость (ускорение) точки vr (ar) – скорость (ускорение) точки, вычисленная относительно подвижной системы отсчета.
Переносное движение (e) - движение подвижной системы отсчета, рассматриваемое относительно неподвижной системы отсчета.
Переносная скорость (ускорение) точки ve (ae) – скорость (ускорение) точки, принадлежащей подвижной системе координат или твердому телу, с которым жестко связана подвижная система координат, совпадающей с рассматриваемой движущейся точкой в данный момент времени и вычисленная относительно неподвижной системы отсчета.
К - неподвижная система отчета; К1 - подвижная система отчета.
 Для пояснения сказанного, рассмотрим движение человека по палубе идущего катера.
Для пояснения сказанного, рассмотрим движение человека по палубе идущего катера.
Неподвижную систему свяжем с берегом реки.
Подвижную систему отчета совместим с движущимся катером.
Движение человека по палубе – относительное движение.
Движение самой палубы – переносное движение.
Движение человека относительно берега – абсолютное движение.
Теорема о сложении скоростей – абсолютная скорость точки равна геометрической сумме относительной и переносной скоростей точки.
Пусть точка М совершает сложное движение.

Положение точки М определяется по отношению к неподвижной системе отчета радиус-вектора  .
.
 ,
,
По отношению к подвижной системе отчета положение точки М определяется радиус-вектором  .
.

Положение точки О1 по отношению к неподвижной системе.
Из рисунка имеем
 (1)
(1)
Дифференцируем векторное равенство (1) по времени t, получим
 ,
,
где  - абсолютная скорость точки.
- абсолютная скорость точки.
 (2)
(2)
Формула вида (2) или (2/) выражают теорему параллелограмма сложения скоростей.
Модуль абсолютной скорости найдем по теореме косинуса.
 ,
,

