




Для определения места и роли датчиков угловой скорости в управлении объектом контроля рассмотрим классификационную схему, представленную на рис.2.
| ИЗМЕРИТЕЛИ |
| пилотажных параметров полета |
| навигационных параметров полета |
| по характеру задачи управления ЛА |
| космический ЛА |
| самолет |
| вертолет |
| экраноплан и др. |
| наземные |
| бортовые |
| спутниковые |
| по месту размещения |
| аэротермо- динамические поля |
| электромагнитное поле (излучение) |
| поле инерциаль- ных сил ЛА |
| по физической природе источника информации |
| геофизическое поле Земли |
| акустическое поле (излучение) |
| по виду модуляции информативного параметра |
| амплитудная |
| частотная |
| временная |
| фазовая |
| Другие виды модуляции |
| по типу структурного построения |
| Прямого преобразования |
| Развертывающего преобразования |
| Дифференциального преобразования |
| Уравновешивающего преобразования |
| акустическая |
| оптическая |
| тактильная |
| аналоговая |
| цифровая |
| комбинированная |
| по типу объекта измерения |
| по форме представления измерительной информации |
Рис.2 Классификационная схема измерителей и навигационных параметров ЛА (угловой скорости)
Информация по угловой скорости может быть получена измерительными преобразователями (датчиками), основанными на самых различных физических принципах.
| Датчики (преобразователи угловой скорости) |
| по характеру движения носителя информации |
| поступательные |
| колебательные (вибрационные) |
| вращательные |
| по типу носителя кинетической энергии |
| по физ. состоянию нос. инф-ии |
| по структуре носителя информации |
| ламинарные |
| вихревые |
| по виду вторичного преобразования |
| по структуре преобразования |
| прямого |
| уравновешив. |
Рис.3 Классификация преобразователей угловой скорости
Преобразователи угловой скорости применяются на объектах различного назначения, требования к которым, соответственно, тоже различны. Датчик должен вырабатывать сигнал с заданной точностью в условиях эксплуатации объекта, на котором он применяется, т.е. в соответствующих диапазонах скоростей, температур, ускорений, вибраций [1].
В табл.1 систематизированы различные датчики измерения угловых скоростей, основанные на различных эффектах, рассмотрены их достоинства и недостатки.
Таблица 1
| № п/п | Принципиальная схема | Обозначения | Достоинства и недостатки |

| Гироскопические ДУС: 1-цилиндр; 2-рышки; 3-центральный внутренний выступ; 4-пьезопластины; 5-инерционные массы ЧЭ; 6-V-образный рычаг; 7-грузарретир; 8-груз-противовес; 9-упругие пластины. | Недостатки: Значительный и непостоянный по величине момент трения в подшипниках рамы подвеса; большое время готовности; недостаточная вибрационная и ударная прочность и устойчивость; относительно небольшое быстродействие; большая величина дрейфа 4,8*10-7…1,9*10-6 рад/с. | |

| Вихревой ДУС: 1-корпус; 2-соедини-тельное кольцо; 3,4-диски; 5-проводящий канал; 6-камера; 7-выходной канал; 8-приёмные трубки. | Недостатки: Высокое потребление энергии; высокий выходной импеданс; узкая полоса пропускания. | |

| Струйный преобразователь угловой скорости ЛСДУС: 1-нагнетатель, 2-сопло, 3-рабочая камера, 4-корпус, 5-термоанемочувствительные элементы, 9-затопленная струя. | Достоинства: Высокий предельный динамический диапазон; малый дрейф нуля; не восприимчив ко всем видам излучений; |
Свойство гироскопов сохранять заданное направление и реагировать на угловые отклонения и угловые скорости изменения положения своего основания обусловило широкое их применение в различных системах управления движением кораблей, самолетов, ракет и космических аппаратов.
В настоящее время гироскопы стали основными элементами большинства навигационных систем. Точность их работы определяет точность самих систем, поэтому развития гироскопов уделяется исключительно большое внимание [2].
В ведущих странах мира разработкой и производством гироскопов и гироскопических систем, в которых они используются, занято значительное количество научных и промышленных организаций, причем суммы затрат на проводимые исследования с каждым годом возрастают. Только в США разработкой гироскопических элементов и гиросистем занято около 50 фирм.
Прилагаемые усилия привели к значительному увеличению точности и улучшению других параметров гироскопов. В основном это было достигнуто за счет усовершенствования конструкции и использования новой технологии изготовления гиромоторов и подвесов. Однако дальнейшее улучшение конструкции применяющихся подвесов ротора, технологии изготовления и методов сборки с целью повышения точности и увеличения срока службы современных гироскопов «обычных» типов встречает очень серьезные трудности и, кроме того, связано с существенным возрастанием стоимости их производства (рис.4).

Рис.4 Возрастание стоимости производства
гироскопов при повышении их точности по годам
1 – скорость хода; 2 – стоимость;
Особенно жесткие требования к гироскопическим элементам предъявляют навигационные системы, условия использования, которых требуют длительной непрерывной и автономной работы, что имеет место на большинстве морских объектов, а также системы объектов, присутствие человека на которых заведомо исключено или возможности его вмешательства очень ограничены, например, на ракетах и космических аппаратах.
Все возрастающие требования к навигационному оборудованию, особенно с учетом автономности объекта или его необитаемости, в наибольшей степени могут быть удовлетворены лишь при использовании инерциальных навигационных систем, позволяющих автономно вырабатывать основные навигационные параметры и автономно управлять объектами. Однако точность таких систем и область их применения ограничиваются в настоящее время величиной погрешности (дрейфом) и недостаточным сроком службы используемых гироскопов.
Рост требований к точности гироскопических ДУС чрезвычайно велик (рис. 5.). Существующие гироскопы (на шариковых и газовых подшипниках, а также поплавковых), несмотря на большие усилия, прилагаемые к их усовершенствованию, не отвечают предъявляемым требованиям. Поэтому наряду с совершенствованием уже известных типов гироскопических ДУС во многих странах мира проводится широкий поиск путей создания гироскопов новых типов.

Рис.5 Кривая роста требований к точности
гироскопических ДУС по годам
Этот поиск преследует также и другую цель, а именно снижение стоимости гироскопических ДУС, что очень существенно в условиях их массового использования. Стоимость отдельных гироскопов составляет от 20 до 60% стоимости гироплатформ и до 20% стоимости гиросистем. Общая же сумма затрат на производство гироскопов, например, в США только в 1964 г. превысила 121 млн. долл. Поэтому вопросам снижения стоимости гироскопических ДУС уделяется серьезное внимание, и здесь существенных результатов можно ожидать именно от новых типов гироскопических ДУС.
Новые типы гироскопических ДУС условно можно подразделить на шесть различных групп: гироскопические ДУС с новым типом подвеса сферического твердотелого ротора, вращающегося в вакууме; гироскопические ДУС с нетвердотелым носителем момента количества движения (жидкость, облако ионов и т. п.); гироскопические ДУС, момент количества движения, которых связан не с вращением, а с колебанием тел; гироскопические ДУС, использующие гиромагнитные свойства микрочастиц (электронов, протонов, нейтронов), атомов и атомных ядер; гироскопические ДУС, использующие изменение параметров электромагнитных колебаний, распространяющихся во вращающихся замкнутых резонансных и нерезонансных контурах; струйно – поляризационные гироскопические ДУС.
Первая группа гироскопических ДУС включает: гироскопические ДУС с электрическим подвесом ротора, создаваемым регулируемым высоковольтным электрическим полем между вращающимся электропроводным ротором и электродами подвеса; гироскопические ДУС с магнитным подвесом ротора; криогенные гироскопы, подвес ротора у которых осуществляется в магнитном поле тока сверхпроводника; радиоизотопные гироскопы.
Ко второй группе относятся: гироскопические ДУС с жидкостным ротором (гидродинамические и магнитогидродинамические), твердотелый ротор, у которых заменен вращающейся жидкостью; ионные ДУС, носителем момента количества движения у которых является вращающееся облако ионов.
Третья группа объединяет вибрационные ДУС различных типов.
К четвертой группе относится большое число различных вариантов гироскопических ДУС, в основе работы которых лежит использование гиромагнитных (т. е. гироскопических и магнитных) свойств микрочастиц, атомов и атомных ядер. В литературе гироскопических ДУС этой группы описываются под наименованием ядерных, спиновых, атомных, индукционных, ядерно - прецессионных, корпускулярных и т. п.
К пятой группе относятся: кольцевые нерезонансные гироскопических ДУС на основе использования электромагнитных колебаний различных диапазонов длин волн; кольцевые резонансные (лазерные) ДУС, использующие кольцевые квантово-оптические генераторы; джозефсоновские ДУС.
К шестой группе относятся: струйные ДУС, использующие инерционные свойства струй жидкости и газа; поляризационные ДУС, основанные на использовании инерционных свойств, плоскости поляризации электромагнитных волн.
Широкий круг эффектов и явлений, на основе которых разрабатываются эти гироскопические ДУС, а также различный уровень их развития на данном этапе в сильной степени затрудняют проведение их сравнительного анализа е целью выявления наиболее перспективных вариантов гироскопических ДУС новых типов. В настоящее время еще трудно предсказать, какой из новых типов гироскопических ДУС окажется, в конечном счете, наилучшим.
Учитывая разнообразные требования, предъявляемые к гироскопических ДУС, можно лишь утверждать, что широкий круг областей их использования ведет к необходимости иметь целый ряд гироскопических ДУС, обладающих различными параметрами.
В табл.2 кратко рассмотрены некоторые типы гироскопических ДУС, развитие которых находятся еще на начальном этапе [2].
Таблица 2
| № п/п | Принципиальная схема | Обозначения | Достоинства и недостатки |

| Вихревой ДУС (вариант I) в двух сечениях.1 – цилиндрическая камера; 2 – выходное сопло;3 – коллектор; 4 – полость камеры;5,12 – сопла;9 – смеситель; 6,7,8,10,11 – система трубопроводов; | Достоинства: нечувствительность к радиации, малая чувствительность к ускорениям, относительно невысокая стоимость и большая прочность. | |
| Вихревой ДУС (вариант II). 1 - камера;2 – пористое металлическое кольцо;3 – зазор; 4 – входное и выходное сопло; | Достоинства: нечувствительность к радиации, малая чувствительность к ускорениям, относительно невысокая стоимость и большая прочность | |

| Принципиальная схема ионного ДУС. 1 – сосуд;2 – полая игла; 3 – источник свет;4 – вакуумная камера;5 – облако;6 – фотодетектор; | Достоинства 1.отсутствие вращающихся механических частей и связанного с ними трения. 2.ионные ДУС оказываются полностью электронными, что должно значительно облегчить их изготовление и уменьшить стоимость. |
Одним из наиболее перспективных направлений в разработке датчиков угловых скоростей для объектов разового применения является струйный датчик угловых скоростей (ДУС) на основе вихревых эффектов. Возможность их использование, обусловлено, тем что они отличаются способностью надежно функционировать в сложных окружающих условиях (при наличии пыли, грязи, ударах, вибрациях, значительных изменениях температуры внешней среды).
Отделением Aerosрасе Div. фирмы Ноneуwе11 Миннеаполис, шт. Миннесота (США) разработана относительно простая и недорогая струйная система демпфирования колебаний вертолета относительно трех осей, вызываемых внешними возмущениями, например, изменениями ветровой нагрузки. Разработанная система при действии внешних возмущений значительно облегчает пилотирование.
Система состоит из трех блоков (по одному на каждую ось вертолета), включающих струйные вихревые датчики угловой скорости, усилительные и преобразовательные элементы. Выходные сигналы блоком подаются к рулевым машинкам, корректирующим положение рулей.
Она менее чувствительна к неблагоприятным окружающим условиям, чем существующие системы, и может питаться непосредственно от бортовой сети гидропитания. Стоимость изготовления установки и эксплуатации струйной системы демпфирования намного меньше стоимости обычных систем.
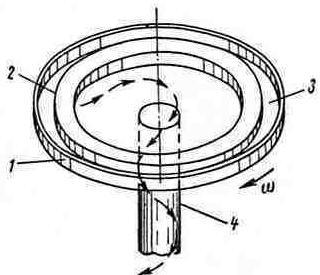
Основным элементом каждого из трех блоков системы является встроенный датчик угловой скорости, представляющих вихревую камеру с кольцевой пористой вставкой, через которую в основном объеме камеры поступает рабочая жидкость. Ось камеры совпадает с направлением оси вертолета, относительно которой рассматриваемый блок демпфирует колебания. Схема вихревого датчика приведена на рис. 6.

Рис. 6. Вихревой датчик угловой скорости
Где:
1 - подвод жидкости; 2 - пористая кольцевая вставка; 3 - направление движения жидкости при неподвижном корпусе датчика; 4 - направление движения жидкости при вращении корпуса; 5 - вращение корпуса; 6 - винтовые линии тока в выходном канале.
Подаваемая под давлением во внешнюю кольцевую часть камеры рабочая жидкость проходит через кольцевую пористую вставку в основной объем камеры. Когда камера неподвижна, линии тока жидкости направлены по радиусам к центру вихревой камеры.
Гидравлическое сопротивление камеры в этом случае мало. При вращении камеры относительно оси поток в камере завихряется (в соответствии с законом, сохранения момента количества движения линии тока, становятся спиральными). Отклонение линий тока от радиального направления увеличивается с приближением к выпускному отверстию. Гидравлическое сопротивление камеры возрастает, что приводит к уменьшению выходного давления датчика, причем изменение давления оказывается пропорциональным изменению угловой скорости вихревой камеры.
Наиболее простым является блок демпфирования колебаний относительно оси крена, в который кроме датчика угловой скорости и дифференцирующего контура входит предварительный и выходной усилители, а также гидромеханический преобразователь, с рулевой машинкой. Блок тангажа обладает наибольшим коэффициентом усилении и содержит кроме дифференцирующего, еще и интегро - дифференцирующий контур. Рулевая машинка блока выходит на ограничение при угловой скорости около 4°/сек. Блок рысканья отличается от описанных блоков наличием обратной связи по положению руля, выполненной с использованием датчиков типа сопло - заслонка 10, дросселей, сильфона и усилителя.

