




При построении цифрового измерительного оборудования применяются различные методы и средства преобразования аналоговой информации в цифровую, отличающиеся метрологией, помехозащищенностью, динамикой. Рассмотрим и сравним возможности и основные характеристики некоторых из них, наиболее распространенных.
В цифровой измерительной технике достаточно широко применяется преобразователь (считающийся классическим типом АЦП) последовательного приближения (поразрядного уравновешивания) - Successive Approximation ADC - с устройством выборки и хранения (УВХ) на входе. Устройство выборки и хранения обеспечивает выполнение дискретизации входного сигнала, т.е. переход к дискретному времени.
Один цикл преобразования входного измеряемого напряжения Ux в этом методе состоит из нескольких тактов. Уравновешивание выполняется с помощью автоматически изменяющегося компенсирующего напряжения. Процесс преобразования заключается в поочередном сравнении изменяющегося по определенному алгоритму компенсирующего напряжения U кс измеряемым Ux. В соответствии с алгоритмом, напряжение U кцеленаправленно стремится стать равным Ux,т.е. уравновесить его. В течение нескольких тактов напряжение U к становится практически равным значению Ux. Такое преобразование напоминает процедуру взвешивания, когда, используя несколько разных гирь и подбирая (устанавливая или снимая) гири, начиная со старшей, т.е. уравновешивая, можно достичь удовлетворительного равновесия. Этот метод преобразования обеспечивает средние метрологические характеристики и достаточно высокое быстродействие. Поэтому в основном именно он и применяется в цифровых средствах динамических измерений (цифровых измерительных регистраторах, цифровых осциллографах и анализаторах).
Типичные параметры таких АЦП: n = (10... 16) бит; F д= (0,02... 100) МГц.
Среди других методов, используемых в средствах динамических измерений - метод параллельного преобразования (Flash ADC), который обеспечивает наиболее высокое быстродействие (правда, с малой разрядностью и невысокой точностью).
Входной сигнал при помощи множества однотипных компараторов сравнивается одновременно с рядом опорных напряжений, формируемых точным делителем напряжения. Затем с помощью дешифратора выявляется граница между двумя группами компараторов с одинаковыми состояниями («0» и «1») и результат сравнения преобразуется в привычный двоичный код. При числе компараторов т = 256 образуется выходное слово с разрядностью n = 8 бит. При числе компараторов т = 1024 образуется выходное слово с разрядностью п = 10 бит.
Типичные характеристики параллельных АЦП: п = (6... 10) бит, скорость преобразования 20... 1000 МГц.
В автономных цифровых вольтметрах и мультиметрах, предназначенных для статических измерений, а также в некоторых регистраторах/анализаторах, логгерах, особенно в тех, которые предназначены для работы с медленноменяющимися процессами, применяются АЦП интегрирующего типа (Integrating ADC). Интегрирующие методы преобразования обеспечивают самые высокие точность, чувствительность, разрешающую способность, а также высокое подавление периодических помех сетевой частоты (что особенно важно в экспериментах, выполняемых в промышленные условиях и при работе с сигналами малого уровня). Правда, эти АЦП сравнительно медленно действующие (длительность цикла преобразования, как правило, десятки миллисекунд - единицы секунд), но для автономных приборов и не требуется высокого быстродействия (так как оператор не в состоянии был бы воспринимать разные цифровые отсчеты, меняющиеся быстрее, чем 1 раз в секунду).
В настоящее время применяют две разновидности интегрирующего аналого-цифрового преобразования: времяимпульсный и частотно-импульсный методы.
При использовании времяимпульсного метода входное напряжение преобразуется в пропорциональный по длительности интервал времени, который затем заполняется импульсами стабильной известной частоты F 0. Сформированная таким образом серия импульсов подсчитывается счетчиком, содержимое которого по окончании счета и определяет значение измеряемого напряжения. Цикл преобразования состоит из двух основных тактов. Основной узел такого АЦП - интегратор, который в течение первого такта Т 1(длительность которого всегда постоянна) интегрирует входной сигнал, а если к сигналу примешана периодическая помеха, то интегрирует сумму сигнала и помехи. На этом такте емкость интегратора линейно заряжается. При равенстве (или кратности) интервала первого такта периоду помехи результат интегрирования не будет зависеть от помехи. Во втором такте Т 2на вход интегратора поступает опорное (стабильное, образцовое) напряжение, полярность которого противоположна полярности измеряемого напряжения. При этом емкость интегратора линейно разряжается. Компаратор фиксирует момент полного разряда емкости. Таким образом, длительность второго такта пропорциональна значению входного постоянного напряжения. Затем значение длительности второго такта с помощью генератора тактовой частоты и счетчика импульсов преобразуется в пропорциональный цифровой код. Длительность интервала первого такта Т 1 задается разработчиком равным или кратным периоду периодической помехи (номинальное значение частоты сети и, следовательно, частоты помехи 50 Гц, а ее период 20 мс).
Степень ослабления влияния помехи характеризуется коэффициентом подавления K п,который выражается в децибелах и определяется по формуле
K п = 20 lg (U пм / D U п),
где U пм - амплитудное значение периодической помехи на входе АЦП; D U п- изменение результата преобразования, вызванное действием помехи.
Например, если в паспорте на прибор записано: «коэффициент подавления K ппомехи нормального вида частоты сети 50 Гц ± 1 % не хуже 40 дБ», то это означает, что помеха такой частоты ослабляется не менее, чем в 100 раз. Значение коэффициента K п= 60 дБ означает уменьшение влияния помехи на результат измерения в 1000 раз. Чем больше значение коэффициента K п,тем выше подавление периодической помехи, и тем, следовательно, лучше.
Частотно-импульсный метод основан на предварительном преобразовании входного сигнала в пропорциональную частоту следования импульсов. Эти импульсы в течение стабильного интервала времени Т 0 поступают на счетчик, который и подсчитывает число импульсов в серии. Таким образом, содержимое счетчика отражает значение входного напряжения.
Типичные параметры интегрирующих АЦП: п = (12...20) бит; длительность одного цикла преобразования Т ц= (0,1... 10) с; коэффициент подавления K п= (40...60) дБ.
Существует объективная обратно пропорциональная зависимость между разрядностью (точностью/чувствительностью) преобразования и быстродействием (скоростью) АЦП. Эта зависимость вполне логична и по смыслу подобна «золотому» правилу механики: «Выиграешь в силе - проиграешь в расстоянии». Для измерительной техники это правило можно сформулировать так: «Выиграешь в точности - проиграешь в быстродействии» или, наоборот: «Выиграешь в скорости - проиграешь в точности».
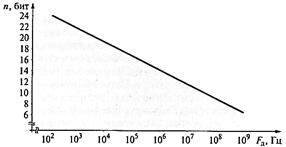
Рис. 67. Связь точности (разрядности АЦП) и быстродействия
Рис. 67 упрощенно иллюстрирует эту связь для современного уровня развития техники аналого-цифрового преобразования.
Масштаб по оси абсцисс (частота дискретизации F д)логарифмический. При линейном масштабе по оси абсцисс эта зависимость носила бы гиперболический характер.
ЦИФРОВЫЕ ЧАСТОТОМЕРЫ
Начинать изучение цифровых измерительных приборов удобно и логично с рассмотрения устройства и принципа действия самого простого и понятного по структуре и набору основных процедур преобразования представителя ЦИП - цифрового частотомера (ЦЧ). Многие формы преобразования, выполняемые в ЦЧ, лежат в основе большинства других ЦИП.
Цифровые частотомеры - довольно распространенные измерительные приборы, используемые в самых различных отраслях науки, техники, промышленности для оценки частотно-временных параметров электрических сигналов. Они работают в очень широком диапазоне значений измеряемых частот периодических сигналов (или их периода). Современные ЦЧ обеспечивают самые высокие метрологические характеристики (точность и разрешающую способность) среди всех прочих ЦИП, отличаются достаточно высоким быстродействием, широкими функциональными возможностями, простотой эксплуатации, высокой надежностью.
Помимо измерения частотно-временных параметров периодических сигналов, современные ЦЧ применяются и для измерения различных физических величин. Для этого необходимо подключать к ЦЧ вспомогательные первичные измерительные преобразователи (датчики), имеющие выходные сигналы, частота или период (длительность) которых пропорциональны измеряемой величине. Например, ЦЧ можно использовать для измерения скорости вращения вала двигателя, или расхода жидкости в трубопроводе, или скорости потока воздуха. Цифровые частотомеры находят также применение в качестве генераторов стабильных частот и таймеров постоянных или программируемых интервалов времени. Кроме того, с помощью ЦЧ легко можно организовать подсчет числа импульсов (числа событий).
Практически все ЦЧ обеспечивают два основных режима работы: измерения частоты и измерения периода (длительности интервала времени). Рассмотрим структуры, принципы действия и погрешности ЦЧ в этих режимах.
Режим измерения частоты
Упрощенная структура ЦЧ, реализующая режим измерения частоты, показана на рис. 66, а, а временные диаграммы работы в этом режиме приведены на рис. 68, б.
Исследуемый периодический сигнал 1 (соответственно диаграмма 1) подается на вход усилителя-ограничителя УО, где преобразуется в последовательность прямоугольных импульсов 2 (диаграмма 2) фиксированной амплитуды, частота которых равна частоте fx входного сигнала. Далее этот сигнал поступает на вход электронного ключа, которым управляет таймер, периодически замыкающий его на постоянный стабильный интервал времени 3 (диаграмма 3), например Т 0 = 1 нс. Сформированная таким образом серия импульсов 4 (диаграмма 4) поступает на вход счетчика Сч, содержимое которого 5 в начале интервала Т 0 равна нулю, а в конце интервала счета равно числу поступивших импульсов Nx. Это число прямо пропорционально измеряемой частоте fx входного сигнала:
Nx = Ent [ Т 0 / Тx ] = Ent [ Т 0 fx ],
где Ent […] – оператор определения целой части выражения […]; Тx – период входного сигнала (Тx = 1/ fx); fx – частота входного сигнала.
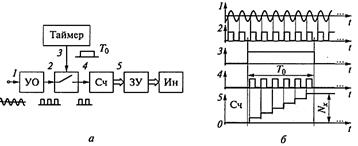
Рис. 68. Режим измерения частоты: а – упрощенная структура ЦЧ; б – временные диаграммы работы
Содержимое счетчика 5 запоминается в буферном запоминающем устройстве ЗУ и хранится там до окончания следующего цикла измерения и переписи нового результата. Одновременно результат поступает на цифровое отсчетное устройство (индикатор Ин). Если, например, в течение интервала Т 0 = 1 с на вход счетчика поступило 254 импульса, то, следовательно, частота входного сигнала fx = 254 Гц. Прибор работает циклически, т.е. в начале каждого нового цикла счетчик «обнуляется». Таким образом, результат измерения периодически обновляется. Отметим, что форма периодического сигнала значения не имеет.
В реальных ЦЧ имеется несколько диапазонов измерения частоты, т.е. формируется несколько различных по длительности стабильных интервалов Т 0 (например Т 01 = 0,1 с; Т 02 = 1,0 с; Т 03 = 10 с). При работе с ЦЧ в режиме измерения частоты важным является правильный выбор диапазона, т.е. выбор интервала Т 0, в течение которого происходит подсчет импульсов. Чем больше импульсов Nx поступит в счетчик (в пределах максимально возможного) на интервале Т 0, тем больше будет значащих цифр результата измерения на индикаторе, тем лучше.
Общая погрешность D F результата измерения частоты fx складывается из двух составляющих: погрешности дискретности D F 1 погрешности D F 2, вызванной неточностью (неидеальностью) задания интервала времени Т 0.
Погрешность дискретности D F 1 неизбежно присутствует в любом аналого-цифровом преобразовании. Рассмотрим природу возникновения этой погрешности. Отношение Т 0 / Тx может быть любым, так как частота fx входного сигнала может иметь бесконечное множество различных значений. Понятно, что в общем случае отношение Т 0 / Тx – дробное число. А поскольку число импульсов Nx, подсчитываемое счетчиком, может быть только целым, то в процессе такого автоматического округления естественно и неизбежно возникает погрешность (погрешность дискретности).
Оценим возможное значение этой погрешности. При одном и том же постоянном значении интервала Т 0, в зависимости от расположения (случайного) во времени входного сигнала и интервала Т 0, число импульсов, приходящихся на интервал Т 0, может отличаться в ту или другую сторону на единицу. На рис. 69, а показаны две разные ситуации при совершенно одинаковых исходных условиях (одна и та же входная частота fx, один и тот же интервал Т 0): в первом случае (диаграмма 1) число импульсов, поступивших в счетчик, равно пяти, а во втором (диаграмма 2) случае число импульсов равно шести.

Рис. 69. Аддитивная погрешность в режиме измерения частоты:
а – возникновение; б – абсолютная и относительная погрешности
Погрешность D F 1 – случайная величина, поскольку входной сигнал и сигнал таймера в общем случае никак не связаны между собой. Максимально возможное значение этой погрешности неизменно и составляет одну единицу младшего разряда – один квант:
D F 1 = ± 1 импульс = ± 1 / Т 0.
Таким образом, D F 1 – это аддитивная погрешность, т.е. не зависящая от значения измеряемой величины – частоты fx (рис.70, б).
Погрешность D F 2 вызвана неточностью (неидеальностью) задания интервала Т 0 (рис.70. а).
Если бы длительность интервала Т 0 имела бы строго номинальное значение, то число импульсов, поступивших в счетчик, было бы равно N 1 (рис. 70. а). Если же интервал Т 0 будет, например, несколько больше номинального и составит Т 0 + D Т 0, то при той же измеряемой частоте fx в счетчик поступит больше импульсов N 2 > N 1.
Неточность D Т 0 задания этого интервала приводит к появлению мультипликативной, т.е. линейно зависящей от значения измеряемой частоты fx, составляющей:
D F 2 = ± fx · D Т 0 / Т 0.
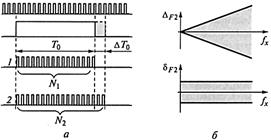
Рис. 70. Мультипликативная погрешность в режиме измерения частоты:
а – возникновение; б – абсолютная и относительная погрешности
Суммарная абсолютная погрешность D F результата измерения частоты fx и суммарная относительная погрешность δ F, %, равны, соответственно:
D F = D F 1 + D F 2 = ± (1/ Т 0 + fx · D Т 0 / Т 0);
δ F = δ F 1 + δ F 2 = ±(1/ Т 0 fx + D Т 0 / Т 0) · 100.
Графическая иллюстрация поведения составляющих и суммарных абсолютной и относительной погрешностей результата измерения частоты fx приведена на рис. 71, а и б,соответственно.

Рис. 71. Суммарные абсолютная (а) и относительная (б) погрешности
Видно, что чем меньше значение измеряемой частоты fx в этом режиме, тем (при постоянном интервале Т 0)хуже, так как тем больше относительная погрешность δ F. Для уменьшения этой погрешности необходимо увеличивать интервал Т 0,но нецелесообразно его делать слишком большим. Так, например, длительность интервала Т 0= 10 с уже неудобна для работы, так как значительное время ожидания появления каждого нового результата (10 с) может вызвать у оператора раздражение. Для измерения сравнительно низких частот удобнее использовать второй режим ЦЧ – режим измерения периода (см. ниже) исследуемого входного сигнала Тх = 1/ fx.
Рассмотрим пример определения погрешностей результата измерения частоты. Предположим, известны значение интервала Т 0= 1 с и возможная погрешность его задания D Т 0 = ±2 мс. Получен результат измерения частоты fx = 1 кГц. Оценим значения составляющих и суммарной погрешности результата.
Значения абсолютных аддитивной D F 1 и мультипликативной D F 2 погрешностей, соответственно равны:
D F 1 = ± 1/ Т 0 = ± 1 Гц;
D F 2 = fx · D Т 0 / Т 0 = (± 1000 · 2 · 10 – 3) / 1 = ± 2 Гц.
Значения относительных аддитивной δ F 1 и мультипликативной δ F 2 погрешностей определим обычным образом:
δ F 1 = (D F 1 / fx) · 100 = ±(1/1000) · 100 = ±0,1 %; δ F 2 = (D F 2 / fx) · 100 =
= ±(2/1000) · 100 = ±0,2 %.
Суммарные абсолютная D F и относительная δ F погрешности результата измерения частоты fx соответственно равны:
D F = D F 1 + D F 2 = ±3 Гц; δ F = δ F 1 + δ F 2 = ±3%.
Режим измерения периода
Упрощенная структура ЦЧ в режиме измерения периода приведена на рис. 72, а,а временные диаграммы – на рис. 79, б. В этом режиме входной периодический сигнал 1 (соответственно диаграмма 1) любой формы подается на вход формирователя периода ФП, где преобразуется в прямоугольный сигнал 2 (диаграмма 2)фиксированной амплитуды, длительность которого Тх равна периоду входного сигнала. Далее этот сигнал поступает на управляющий вход электронного ключа и замыкает его на время Тх. На входе электронного ключа – прямоугольные импульсы 3 (диаграмма 3)стабильной неизвестной частоты F 0,постоянно поступающие с выхода генератора тактовых импульсов ГТИ. Таким образом, на выходе ключа формируется серия прямоугольных импульсов 4 (диаграмма 4), число импульсов Nx в которой пропорционально длительности Тх:,
Nx = Ent [ Tx / T 0] = Ent [ TxF 0],
где Ent [...] - оператор определения целой части выражения [...]; Т 0- период тактовых импульсов, Т 0 = 1 / F 0; F 0- частота тактовых импульсов ГТИ.
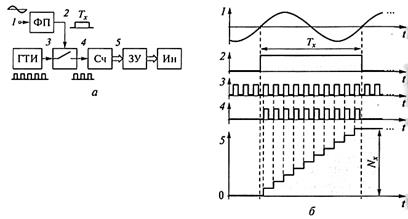
Рис. 72. Режим измерения периода (интервала времени): а – упрощенная структура;
б – временные диаграммы
Счетчик Сч подсчитывает пришедшие импульсы и затем содержимое счетчика 5 переписывается в запоминающее устройство ЗУ, где и хранится до окончания следующего цикла и переписи нового результата. Индикатор Ин позволяет считывать результат измерения. Если, например, частота импульсов ГТИ была установлена F 0= 1 кГц, а содержимое счетчика Сч в конце интервала счета оказалось равным Nx = 1520, то период входного сигнала, следовательно, равен Тх = 1,52 с.
И в этом режиме ЦЧ работает циклически, т.е. в начале каждого нового цикла преобразования счетчик обнуляется. Таким образом, результат измерения периодически обновляется.
Обычный ЦЧ имеет высокочастотный стабильный ГТИ и цифровой делитель частоты, с помощью которого формируется несколько разных тактовых частот F 0(например, F 01 = 1,0 кГц; F 02= 10 кГц; F 03 = 100 кГц; F 04 = 1,0 МГц), что означает наличие нескольких возможных диапазонов измерения периода. Важным, поэтому, является вопрос правильного выбора диапазона измерения, в котором обеспечивается минимальная погрешность.
Погрешность D T результата измерения периода (интервала времени) Тх,как и в режиме измерения частоты, содержит две составляющие: погрешность дискретности D T 1 погрешность D T 2вызванную неточностью (неидеальностью) значения F 0частоты ГТИ. Погрешность дискретности D T 1по природе аналогична pacсмотренной в первом режиме и представляет собой аддитивную погрешность (рис. 73, а). Появление второй составляющей - погрешности D T 2 иллюстрирует рис. 73, б.

Рис. 73. Составляющие погрешности в режиме измерения периода: а – аддитивная составляющая; б – появление второй составляющей; в – мультипликативная составляющая
Если бы частота сигнала ГТИ была строго равна номинальной F 0, то число импульсов, поступивших в счетчик в течение интервала Тх,было бы равно N 1. Если же частота сигнала ГТИ будет, например, несколько больше номинальной и составит F 0 + D F 0,то на том же интервале Тх в счетчик поступит больше импульсов N 2 > N 1. Эта составляющая погрешности мультипликативна, т.е. ее значение тем больше, чем больше длительность измеряемого периода (интервала) Тх (рис. 73, в).
Суммарная абсолютная погрешность D T результата измерения периода Тх и суммарная относительная погрешность,%,равны, соответственно:
D T = D T 1 + D T 2 = ±(1/ F 0 + Тх ×D F 0 / F 0);
δ Т = δ Т 1 + δ Т 2 = ±(1/ F 0× Тх + D F 0 / F 0) × 100.
Таким образом видно, что в этом режиме, чем меньше измеряемый период Тх (чем больше значение частоты fx, тем хуже, так как тем больше относительная погрешность. Для измерения сравнительно малых значений периода Тх (или сравнительно высоких частот) следует использовать первый режим ЦЧ - режим измерения частоты fx.

