




Построение картины внешнего эвольвентного зацепления
Пример построенной картины зацепления приведен на рисунке 13.
 Рисунок 13 – Картина эвольвентного зацепления
Построение картины эвольвентного зубчатого зацепления производится в следующем порядке:
1 Откладываем межосевое расстояние O1O2=αw/Kl, выбрав такой масштаб, чтобы получить LО1О2 = 850…900 мм.
2 Переводим расчетные диаметры окружностей в масштаб чертежа (поделив их значения на масштаб Kl) и определяем радиусы для вычерчивания этих окружностей.
3 Строим основные окружности с центрами в точках О1 и О2.
4 Проводим общую касательную N1N2 к основным окружностям и обозначаем полюс зацепления (W).
5 Проверяем радиусы начальных окружностей и строим эти окружности.
6 Проводим окружности вершин, находим точки пересечения с линией зацепления и определяем рабочий (активный) участок линии зацепления Р1Р2.
7 Проводим окружности впадин (радиус окружности впадин может быть больше, равен и меньше радиуса основной окружности. Это зависит от числа зубьев Z колеса и коэффициента смещения Х).
8 Строим эвольвенты, которые описывает точка (W) прямой N1N2 при перекатывании ее по основным окружностям:
1) отрезок N1W (N2W) делим на n равных частей и откладываем точно такие же части на основной окружности в обе стороны от точки N1 (N2). При этом в сторону полюса W откладывается n частей, в противоположную сторону (2-3 части);
2) полученные на основной окружности точки соединяем с центром колеса O1 (O2) и проводим в них касательные к основной окружности (перпендикуляры к соответствующим радиусам);
3) на касательных откладываем отрезки, включающие столько частей, сколько содержится в дуге основной окружности от точки касания до начала эвольвенты;
4) соединяя найденные на касательных точки, получим эвольвенту.
9 Откладываем толщину зуба (соответственно S1 и S2) на делительной окружности от построенной эвольвенты и, разделив эту толщину пополам, проводим ось симметрии зуба (она проходит через центр колеса О1 и О2 соответственно). По симметрии строим встречную эвольвенту зуба.
10 Начиная от граничной точки l
Рисунок 13 – Картина эвольвентного зацепления
Построение картины эвольвентного зубчатого зацепления производится в следующем порядке:
1 Откладываем межосевое расстояние O1O2=αw/Kl, выбрав такой масштаб, чтобы получить LО1О2 = 850…900 мм.
2 Переводим расчетные диаметры окружностей в масштаб чертежа (поделив их значения на масштаб Kl) и определяем радиусы для вычерчивания этих окружностей.
3 Строим основные окружности с центрами в точках О1 и О2.
4 Проводим общую касательную N1N2 к основным окружностям и обозначаем полюс зацепления (W).
5 Проверяем радиусы начальных окружностей и строим эти окружности.
6 Проводим окружности вершин, находим точки пересечения с линией зацепления и определяем рабочий (активный) участок линии зацепления Р1Р2.
7 Проводим окружности впадин (радиус окружности впадин может быть больше, равен и меньше радиуса основной окружности. Это зависит от числа зубьев Z колеса и коэффициента смещения Х).
8 Строим эвольвенты, которые описывает точка (W) прямой N1N2 при перекатывании ее по основным окружностям:
1) отрезок N1W (N2W) делим на n равных частей и откладываем точно такие же части на основной окружности в обе стороны от точки N1 (N2). При этом в сторону полюса W откладывается n частей, в противоположную сторону (2-3 части);
2) полученные на основной окружности точки соединяем с центром колеса O1 (O2) и проводим в них касательные к основной окружности (перпендикуляры к соответствующим радиусам);
3) на касательных откладываем отрезки, включающие столько частей, сколько содержится в дуге основной окружности от точки касания до начала эвольвенты;
4) соединяя найденные на касательных точки, получим эвольвенту.
9 Откладываем толщину зуба (соответственно S1 и S2) на делительной окружности от построенной эвольвенты и, разделив эту толщину пополам, проводим ось симметрии зуба (она проходит через центр колеса О1 и О2 соответственно). По симметрии строим встречную эвольвенту зуба.
10 Начиная от граничной точки l
 плавно сопрягаем эвольвенту с окружностью впадин. Так как по заданию не требуется точного построения переходной кривой, то сопряжение производится произвольной кривой.
11 Используя известный шаг по дуге делительной окружности (Р), строим соседние зубья. При этом можно использовать шаблоны. На каждом из колес должно быть изображено не менее 3-4 зубьев.
12 Отмечаем зону однопарного зацепления на линии зацепления, отложив основной шаг Pb (в выбранном масштабе Kl) от точек Р1 и Р2
плавно сопрягаем эвольвенту с окружностью впадин. Так как по заданию не требуется точного построения переходной кривой, то сопряжение производится произвольной кривой.
11 Используя известный шаг по дуге делительной окружности (Р), строим соседние зубья. При этом можно использовать шаблоны. На каждом из колес должно быть изображено не менее 3-4 зубьев.
12 Отмечаем зону однопарного зацепления на линии зацепления, отложив основной шаг Pb (в выбранном масштабе Kl) от точек Р1 и Р2
 и проверяем графически коэффициент перекрытия:
и проверяем графически коэффициент перекрытия:
 13 Отмечаем нижнюю точку Pi рабочего (активного) профиля зуба, для чего радиусом О1Р1 сносим точку Р1 на профиль зуба первого колеса – часть профиля от вершины зуба до точки Р1 является рабочей (активной) частью профиля зуба этого колеса. Аналогично отмечается рабочая часть профиля зуба второго колеса (точка Р2 сносится радиусом О2Р2 на профиль зуба этого колеса).
14 Отмечаем на профилях зубьев зону однопарного зацепления, для чего сносим точки u и v радиусами O1u и O1v – на профиль зуба первого колеса, а радиусами O2u и O2v – на профиль зуба второго колеса.
15 Обозначаем все расчетные диаметры (основных, делительных, начальных окружностей, а также окружностей вершин и впадин) в соответствии со стандартом.
16 На одном из колес отмечаем дугу зацепления на начальной окружности. Для этого строим эвольвенту зуба данного колеса в начале зацепления (проходящую через точку P1) и в конце зацепления данной пары (проходящую через точку P2). Дуга окружности между этими положениями эвольвенты является дугой зацепления на этой окружности (т.е. путь проходимый точкой зуба за время работы данной пары).
На рисунке 13 дуга cd представляет собой дугу зацепления на начальной окружности второго колеса (но дуга зацепления на начальной окружности первого равна дуге зацепления на начальной окружности второго колеса)
13 Отмечаем нижнюю точку Pi рабочего (активного) профиля зуба, для чего радиусом О1Р1 сносим точку Р1 на профиль зуба первого колеса – часть профиля от вершины зуба до точки Р1 является рабочей (активной) частью профиля зуба этого колеса. Аналогично отмечается рабочая часть профиля зуба второго колеса (точка Р2 сносится радиусом О2Р2 на профиль зуба этого колеса).
14 Отмечаем на профилях зубьев зону однопарного зацепления, для чего сносим точки u и v радиусами O1u и O1v – на профиль зуба первого колеса, а радиусами O2u и O2v – на профиль зуба второго колеса.
15 Обозначаем все расчетные диаметры (основных, делительных, начальных окружностей, а также окружностей вершин и впадин) в соответствии со стандартом.
16 На одном из колес отмечаем дугу зацепления на начальной окружности. Для этого строим эвольвенту зуба данного колеса в начале зацепления (проходящую через точку P1) и в конце зацепления данной пары (проходящую через точку P2). Дуга окружности между этими положениями эвольвенты является дугой зацепления на этой окружности (т.е. путь проходимый точкой зуба за время работы данной пары).
На рисунке 13 дуга cd представляет собой дугу зацепления на начальной окружности второго колеса (но дуга зацепления на начальной окружности первого равна дуге зацепления на начальной окружности второго колеса)
|
График движения толкателя
Построение графиков движения толкателя
Закон движения толкателя задан в виде графика ускорений толкателя (при коромысловом толкателе – угловых ускорений).
Однако при дальнейшем решении задачи в качестве аргумента используются не время, а угол поворота кулачка φ. Поэтому данный график удобно рассматривать как график аналога ускорений S''=f(φ) или ψ''=f(φ) - при коромысловом толкателе.
 - аналог ускорения толкателя (линейная величина, пропорциональная ускорению);
- аналог ускорения толкателя (линейная величина, пропорциональная ускорению);
 - аналог углового ускорения коромысла (безразмерная величина, пропорциональная угловому ускорению коромысла).
При дифференцировании графика аналога ускорений соответственно будем получать график аналога скоростей толкателя.
- аналог углового ускорения коромысла (безразмерная величина, пропорциональная угловому ускорению коромысла).
При дифференцировании графика аналога ускорений соответственно будем получать график аналога скоростей толкателя.
 - аналог скорости толкателя (линейная величина, пропорциональная скорости толкателя);
- аналог скорости толкателя (линейная величина, пропорциональная скорости толкателя);
 - аналог угловой скорости коромысла (безразмерная величина, пропорциональная угловой скорости коромысла).
Переход от аналогов к ускорениям или скоростям осуществляется простой заменой переменных через известную угловую скорость кулачка ω1:
- аналог угловой скорости коромысла (безразмерная величина, пропорциональная угловой скорости коромысла).
Переход от аналогов к ускорениям или скоростям осуществляется простой заменой переменных через известную угловую скорость кулачка ω1:
 Решение задачи начинается с построения графика аналога ускорений в соответствии с заданием. Выбрав масштаб по оси абсцисс Kφ, отмечаем заданные углы поворота кулачка, соответствующие характерным участкам графика аналога ускорений:
Решение задачи начинается с построения графика аналога ускорений в соответствии с заданием. Выбрав масштаб по оси абсцисс Kφ, отмечаем заданные углы поворота кулачка, соответствующие характерным участкам графика аналога ускорений:
 где
L – отрезок на оси абсцисс, соответствующий полному обороту кулачка.
Обычно принимают L=360 мм (тогда Kφ= 1град/мм = 0,01745рад/мм) или L=240 мм (Kφ=1,5 град/мм=0,0262 рад/мм).
Ординаты графика аналога ускорений выбираются произвольно, однако площади, ограниченные графиком, над осью и под осью абсцисс должны быть одинаковыми (как на фазе удаления, так и на фазе приближения толкателя).
После построения графика аналога ускорений (аналога угловых ускорений для коромыслового толкателя) производим его интегрирование. Как правило, его производят методом хорд. Для этого:
1) разбиваем каждый характерный участок построенного графика аналога ускорений на более мелкие участки;
2) находим среднее значение функции на выделенных участках (считая, что оно соответствует значению функции на середине выделенного участка) и сносим их на ось ординат;
3) слева от оси ординат на оси абсцисс откладываем полюсное расстояние Н и отмечаем полюс Р (ОР=Н). Полюсное расстояние в принципе назначается произвольно (в пределах 30...60 мм). Однако для дальнейших построений желательно иметь масштабы графиков аналога ускорений, аналога скоростей и перемещений толкателя одинаковыми. В этом случае полюсное расстояние принимается H = 1/Kφ (при L=360 мм и Kφ= 0,01745 рад/мм – H=57,3 мм; при L=240 мм и Kφ= 0,0262 рад/мм – H=38,2 мм);
4) соединяя полученные по п. 2 точки на оси ординат с полюсом Р, формируем направления хорд на соответствующих участках графика аналога скоростей;
где
L – отрезок на оси абсцисс, соответствующий полному обороту кулачка.
Обычно принимают L=360 мм (тогда Kφ= 1град/мм = 0,01745рад/мм) или L=240 мм (Kφ=1,5 град/мм=0,0262 рад/мм).
Ординаты графика аналога ускорений выбираются произвольно, однако площади, ограниченные графиком, над осью и под осью абсцисс должны быть одинаковыми (как на фазе удаления, так и на фазе приближения толкателя).
После построения графика аналога ускорений (аналога угловых ускорений для коромыслового толкателя) производим его интегрирование. Как правило, его производят методом хорд. Для этого:
1) разбиваем каждый характерный участок построенного графика аналога ускорений на более мелкие участки;
2) находим среднее значение функции на выделенных участках (считая, что оно соответствует значению функции на середине выделенного участка) и сносим их на ось ординат;
3) слева от оси ординат на оси абсцисс откладываем полюсное расстояние Н и отмечаем полюс Р (ОР=Н). Полюсное расстояние в принципе назначается произвольно (в пределах 30...60 мм). Однако для дальнейших построений желательно иметь масштабы графиков аналога ускорений, аналога скоростей и перемещений толкателя одинаковыми. В этом случае полюсное расстояние принимается H = 1/Kφ (при L=360 мм и Kφ= 0,01745 рад/мм – H=57,3 мм; при L=240 мм и Kφ= 0,0262 рад/мм – H=38,2 мм);
4) соединяя полученные по п. 2 точки на оси ординат с полюсом Р, формируем направления хорд на соответствующих участках графика аналога скоростей;
 Рисунок 14 – Диаграммы движения толкателя кулачкового механизма
5) из начала координат графика аналога скоростей проводим хорду на первом выделенном участке, далее из конца этой хорды проводим вторую хорду и т.д. Через вершины полученной ломаной кривой проводим плавную кривую, которая и представляет собой график аналога скоростей толкателя (угловых скоростей при коромысловом толкателе).
Аналогичным способом, интегрируя график аналога скоростей, получаем график перемещений толкателя (угловых перемещений при коромысловом толкателе). Может оказаться, что этот график в конце цикла не приходит в "нуль" (т.е. последнее значение перемещений располагается выше или ниже оси абсцисс).
Но так как на фазе удаления и на фазе приближения толкатель совершает один и тот же путь, то это означает, что левая и правая половина графика изображены в разных масштабах. Поэтому правую часть всех диаграмм (перемещений, аналогов скоростей и аналогов ускорений) надо пропорционально изменить (вытянуть или сжать), умножив на коэффициент μ:
Рисунок 14 – Диаграммы движения толкателя кулачкового механизма
5) из начала координат графика аналога скоростей проводим хорду на первом выделенном участке, далее из конца этой хорды проводим вторую хорду и т.д. Через вершины полученной ломаной кривой проводим плавную кривую, которая и представляет собой график аналога скоростей толкателя (угловых скоростей при коромысловом толкателе).
Аналогичным способом, интегрируя график аналога скоростей, получаем график перемещений толкателя (угловых перемещений при коромысловом толкателе). Может оказаться, что этот график в конце цикла не приходит в "нуль" (т.е. последнее значение перемещений располагается выше или ниже оси абсцисс).
Но так как на фазе удаления и на фазе приближения толкатель совершает один и тот же путь, то это означает, что левая и правая половина графика изображены в разных масштабах. Поэтому правую часть всех диаграмм (перемещений, аналогов скоростей и аналогов ускорений) надо пропорционально изменить (вытянуть или сжать), умножив на коэффициент μ:
 (значения h и b согласно графику перемещения по рисунку 14).
После построения и корректировки всех трех графиков определяем масштабы, в которых они построены:
а) масштаб графика перемещений (угловых перемещений)
(значения h и b согласно графику перемещения по рисунку 14).
После построения и корректировки всех трех графиков определяем масштабы, в которых они построены:
а) масштаб графика перемещений (угловых перемещений)
 где h - заданное перемещение толкателя, мм;
ψ0 - заданное перемещение коромысла, град;
_
h - максимальное значение функции на графике перемещений толкателя (угловых перемещений коромысла);
б) масштаб графика аналога скоростей (аналога угловых скоростей)
где h - заданное перемещение толкателя, мм;
ψ0 - заданное перемещение коромысла, град;
_
h - максимальное значение функции на графике перемещений толкателя (угловых перемещений коромысла);
б) масштаб графика аналога скоростей (аналога угловых скоростей)
 в) масштаб графика аналога ускорений (аналога угловых ускорений)
в) масштаб графика аналога ускорений (аналога угловых ускорений)
 Если приняты рекомендации по пункту 3) данного раздела
Если приняты рекомендации по пункту 3) данного раздела
 то соответственно масштабы вычисляются следующим образом:
то соответственно масштабы вычисляются следующим образом:
 Примечание: Если задан график аналога ускорений в виде простых линий, то ординаты на всех участках этого графика можно определить аналитически из условия, что график перемещений толкателя в конце цикла должен придти в нуль (см. шаблон пояснительной записки, представленный в Приложении Б).
Примечание: Если задан график аналога ускорений в виде простых линий, то ординаты на всех участках этого графика можно определить аналитически из условия, что график перемещений толкателя в конце цикла должен придти в нуль (см. шаблон пояснительной записки, представленный в Приложении Б).
|
Кулачковый механизм
Кулачковый механизм с поступательно движущимся точечным или роликовым толкателем
Строим график зависимости аналога скорости толкателя от его перемещения S''=f(S).
Для этого на вертикальной оси отмечаем перемещение толкателя для n положений (обычно рассматривается 12 положений механизма).
Из полученных точек вдоль горизонтальной оси в том же масштабе откладываем аналоги скоростей для соответствующих положений механизма. При этом на фазе удаления S' откладывается влево, а на фазе приближения – вправо, если угловая скорость кулачка (ω1) направлена против часовой стрелки.
Если угловая скорость кулачка направлена по часовой стрелке, то соответственно на фазе удаления толкателя S' откладывается вправо, а на фазе приближения влево. Через концы отрезков S' проводим плавную кривую. Проведя к этой кривой касательные под углом γmin (справа и слева), получаем разрешенную зону (не заштрихованная область на рисунке 15) для выбора центра вращения кулачка.
Так как в задании требуется спроектировать механизм минимально возможных размеров, то центр вращения кулачка надо выбирать в разрешенной зоне как можно ближе к ее границам (обычно берут с небольшим запасом до 10%).
При этом центр вращения кулачка берется на продолжении оси толкателя, если механизм центральный (rmin на рисунке 15). Если механизм внецентренный, то центр вращения кулачка берется на расстоянии эксцентриситета
 от оси толкателя (r'min на рисунке 15).
от оси толкателя (r'min на рисунке 15).
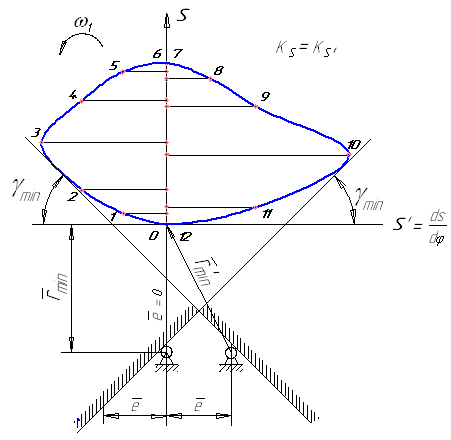 Рисунок 15 – К динамическому синтезу кулачкового механизма с поступательно движущимся роликовым толкателем
Рисунок 15 – К динамическому синтезу кулачкового механизма с поступательно движущимся роликовым толкателем
|

