




Курсовая работа по ОТУ
Расчет параметров системы управления, осуществляющей автоматическое слежение за объектом, перемещающимся в пространстве и излучающим электромагнитные волны.
Выполнил:
студент группы ПО-01
Дудко Иван Юрьевич
Проверил:
профессор
Тяжев Анатолий Иванович
г. Самара, 2003
Задание.
Рассчитать параметры системы управления, осуществляющей автоматическое слежение за объектом, перемещающимся в пространстве и излучающим электромагнитные волны.
 |
РПУ – радиоприемное устройство,
УР – угловой различитель,
КЗ1 – корректирующее звено 1,
УМ – усилитель мощности,
ЭД – электродвигатель,
А – антенна,
МОС – местная обратная связь.
Необходимо определить тип и параметры корректирующего звена КЗ1 и местной обратной связи МОС, обеспечивающих качественные показатели системы, численные значения которых определяются предпоследней  и последней
и последней  цифрами зачетной книжки студента.
цифрами зачетной книжки студента.
Исходные данные для расчета:


1. Полоса пропускания замкнутой системы:
 .
.
2. Показатель колебательности системы:
 .
.
3. Допустимые ошибки слежения системы:
а) ошибка по положению:
 .
.
б) ошибка по скорости:
 .
.
в) ошибка по ускорению:
 .
.
 .
.
4. Параметры исходной части:
 ,
,  ,
,  ,
,  .
.


Решение.
(все расчеты выполнены в системе MathCad)
1. Передаточная функция исходной части разомкнутой системы (без учета КЗ1 и МОС) определяется по формуле:
 .
.
Так как в исходную часть системы входит 4 инерционных звена и интегратор (в данном случае электродвигатель), а гарантированно устойчивой является замкнутая система только при двух инерционных звеньях, поэтому понадобится как минимум два корректирующих звена. Для упрощения расчетов возьмем корректирующие звенья с одинаковыми параметрами, тогда передаточная функция этих звеньев будет описываться выражением:
 , если
, если  , то это КЗ с отставанием по фазе, если
, то это КЗ с отставанием по фазе, если  , то это КЗ с опережением по фазе.
, то это КЗ с опережением по фазе.
 , где
, где  .
.
 .
.
Коэффициенты ошибок по положению, скорости, и ускорению:
Порядок астатизма для нашей системы  .
.
Для :
 .
.
 ,
,


 , в состав КЗ1 нужно включить усилитель с коэффициентом
, в состав КЗ1 нужно включить усилитель с коэффициентом  .
.
Из выражения для  имеем следующее:
имеем следующее:
 ,
,  ,
,  ,
,  .
.

 , надо взять КЗ с отставанием по фазе.
, надо взять КЗ с отставанием по фазе.

1 – ЛАЧХ интегратора,
2 – ЛАЧХ одного корректирующего звена (от 0 до  наклон
наклон  ),
),
3 – ЛАЧХ двух корректирующих звеньев (от 0 до наклон  ),
),
4 – ЛАЧХ системы (от 0 до  наклон , от до наклон
наклон , от до наклон  ,
,
от до  наклон ).
наклон ).
Второе соотношение между T 1 и T 2 найдем из ЛАЧХ разомкнутой системы. Для этого сначала определим частоту среза:
 ,
,
 , то
, то  .
.
 .
.

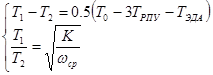
В нашем случае  , значит
, значит
 .
.
 , (1)
, (1)
 , (2)
, (2)
 , (3)
, (3)
Подставим в (2) значения из (1) и (3) и получим:
 ,
,
 ,
,
 ,
,  ,
,  ,
,
 .
.
 ,
,





Первое КЗ включим после углового различителя по схеме:
 . Возьмем
. Возьмем  , тогда
, тогда

Такого номинала нет, поэтому возьмем  .
.
Возьмем  , тогда
, тогда
 .
.
Такого номинала нет, поэтому возьмем  .
.
 ,
, 
Такого номинала нет, поэтому возьмем  .
.
Второе КЗ включим по схеме местной обратной связи, это повышает стабильность параметров, охваченных такой связью звеньев.
 |
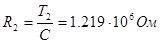
 ,
,
 ,
,
 .
.
При 
 .
.
 ,
,

Передаточную функцию W 0 реализуем последовательным соединением тахогенератора с дифференцирующей цепью  и усилителя с коэффициентом усиления
и усилителя с коэффициентом усиления  .
.
 .
.

 , зададимся
, зададимся  .
.
 .
.
Такого номинала нет, поэтому возьмем 
Фактические запасы устойчивости системы определяется по действительным ЛАЧХ и ЛФЧХ графоаналитическим методом:




ЛАЧХ системы ЛФЧХ системы
Определим по ЛАЧХ частоту среза:
 .
.
Определим по ЛФЧХ критическую частоту:
 .
.
Определим запас устойчивости по усилению:

Определим запас устойчивости по фазе:

Определим фактический показатель колебательности системы:

Используя билинейное z-преобразование, рассчитаем системные функции цифровых прототипов МОС и КЗ и составим их структурные схемы для реализации на ЭВМ.
 ,
,  ,
,  .
.

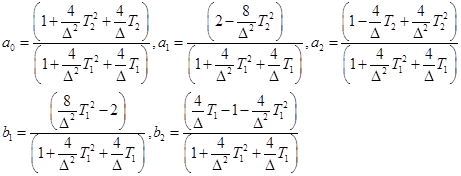
 ,
,
где


Структурная схема цифрового прототипа МОС
Передаточная функция КЗ:
 , , .
, , .

 ,
,



Структурная схема цифрового прототипа КЗ
ЧАСТЬ 2
Схематический чертеж фигуры






